h.264全搜索以及快速全搜索算法
Full Search
全搜索算法是最简单暴力的一种搜索算法,对搜索范围内的所有像素点都进行匹配对比,选出最合适的运动向量,以下就是一个搜索范围为4的全搜索范围(单个像素点)

/*!
***********************************************************************
* \brief按照螺旋搜索顺序进行全搜索
* Full pixel block motion search
* 目标是得到(mv_x,mv_y)和min_mcost,(mv_x,mv_y)指示从哪里开始做分像素搜索,search center
* 后者用来跟分像素搜索结果做比较
***********************************************************************
*/
int // ==> minimum motion cost after search
FullPelBlockMotionSearch (pel_t** orig_pic, // <-- original pixel values for the AxB block
int ref, // <-- reference frame (0... or -1 (backward))
int list,
int pic_pix_x, // <-- absolute x-coordinate of regarded AxB blockAxB宏块原点在图像中的绝对坐标
int pic_pix_y, // <-- absolute y-coordinate of regarded AxB block
int blocktype, // <-- block type (1-16x16 ... 7-4x4)
int pred_mv_x, // <-- motion vector predictor (x) in sub-pel units
int pred_mv_y, // <-- motion vector predictor (y) in sub-pel units
int* mv_x, // <--> in: search center (x) / out: motion vector (x) - in pel units
int* mv_y, // <--> in: search center (y) / out: motion vector (y) - in pel units
int search_range, // <-- 1-d search range in pel units
int min_mcost, // <-- minimum motion cost (cost for center or huge value)
double lambda) // <-- lagrangian parameter for determining motion cost
{
int pos, cand_x, cand_y, y, x4, mcost; pel_t *orig_line, *ref_line;
pel_t *(*get_ref_line)(int, pel_t*, int, int, int, int);//
//参考帧偏移量 帧场自适应且宏块地址为偶数=4 帧场自适应宏块地址为奇数=2 非帧场自适应=0
int list_offset = ((img->MbaffFrameFlag)&&(img->mb_data[img->current_mb_nr].mb_field))? img->current_mb_nr% ? : : ;
pel_t *ref_pic = listX[list+list_offset][ref]->imgY_11;
int img_width = listX[list+list_offset][ref]->size_x;
int img_height = listX[list+list_offset][ref]->size_y; int best_pos = ; // position with minimum motion cost
//计算最大需要搜索的位置个数
int max_pos = (*search_range+)*(*search_range+); // number of search positions
int lambda_factor = LAMBDA_FACTOR (lambda); // factor for determining lagragian motion cost
int blocksize_y = input->blc_size[blocktype][]; // vertical block size
int blocksize_x = input->blc_size[blocktype][]; // horizontal block size
int blocksize_x4 = blocksize_x >> ; // horizontal block size in 4-pel units
int pred_x = (pic_pix_x << ) + pred_mv_x; // predicted position x (in sub-pel units)1/4子像素为单位的预测MV
int pred_y = (pic_pix_y << ) + pred_mv_y; // predicted position y (in sub-pel units)
int center_x = pic_pix_x + *mv_x; // center position x (in pel units)
int center_y = pic_pix_y + *mv_y; // center position y (in pel units)
int check_for_00 = (blocktype== && !input->rdopt && img->type!=B_SLICE && ref==); //===== set function for getting reference picture lines =====
//通过判断搜索范围会不会出界,设置获取参考像素值的函数
if ((center_x > search_range) && (center_x < img->width --search_range-blocksize_x) &&
(center_y > search_range) && (center_y < img->height--search_range-blocksize_y) )
{
get_ref_line = FastLineX;//未出界
}
else
{
get_ref_line = UMVLineX;//出界
} //===== loop over all search positions =====
//max_pos是搜索位置的个数,计算见上面
for (pos=; pos<max_pos; pos++)
{
//--- set candidate position (absolute position in pel units) ---
/*(center_x,center_y)是由预测MV估计出来的搜索中心,在以它为中心的范围内,
对按照螺旋形顺序排列的候选点进行搜索,
每个候选点都是一个可能参考块的左上角起始点
*/
cand_x = center_x + spiral_search_x[pos];//螺旋搜索
cand_y = center_y + spiral_search_y[pos]; //--- initialize motion cost (cost for motion vector) and check ---
//计算MVD的代价,换算成四分之一像素(cand--candidate候选点)
mcost = MV_COST (lambda_factor, , cand_x, cand_y, pred_x, pred_y);
if (check_for_00 && cand_x==pic_pix_x && cand_y==pic_pix_y)
{//螺旋搜索到的点为原点,不过为什么是减去16bit?
mcost -= WEIGHTED_COST (lambda_factor, );
}
//如果只是MV的代价就已经大于现有的最小代价就舍弃
if (mcost >= min_mcost) continue; //--- add residual cost to motion cost ---
//blocksize_y blocksize_x4 是分块大小16x16 16x8 8x16......
for (y=; y<blocksize_y; y++)
{
//(cand_x,cand_y+y)是一行的起始坐标,y++ 遍历每一行
ref_line = get_ref_line (blocksize_x, ref_pic, cand_y+y, cand_x, img_height, img_width);
orig_line = orig_pic [y];
//计算当前帧和参考帧的像素残差
for (x4=; x4<blocksize_x4; x4++) //以4个为一组计算
{
mcost += byte_abs[ *orig_line++ - *ref_line++ ];
mcost += byte_abs[ *orig_line++ - *ref_line++ ];
mcost += byte_abs[ *orig_line++ - *ref_line++ ];
mcost += byte_abs[ *orig_line++ - *ref_line++ ];
} if (mcost >= min_mcost) //如果已经比最小代价大,就没必要计算下面的行了
{
break;
}
} //--- check if motion cost is less than minimum cost ---
//记录下最小代价和最佳匹配位置
if (mcost < min_mcost)
{
best_pos = pos;
min_mcost = mcost;
}
} //===== set best motion vector and return minimum motion cost =====
if (best_pos)
{
*mv_x += spiral_search_x[best_pos]; //因为螺旋搜索数组中记录的是该位置的点
*mv_y += spiral_search_y[best_pos]; //与(center_x,center_y)的差
}
return min_mcost; //返回最小代价
}
//螺旋搜索(全搜索)位置初始化
for (k=, l=; l<=max(,search_range); l++)
{
for (i=-l+; i< l; i++)
{
spiral_search_x[k] = i; spiral_search_y[k++] = -l;
spiral_search_x[k] = i; spiral_search_y[k++] = l;
/*
*
* 9 3 5 7 10
* 1 0 2 11 1 0 2 12
* 13 4 6 8 14
*
*/
}
for (i=-l; i<=l; i++)
{
spiral_search_x[k] = -l; spiral_search_y[k++] = i;
spiral_search_x[k] = l; spiral_search_y[k++] = i;
/* 15 17 19 21 23
* 3 5 7 9 3 5 7 10
* 1 0 2 11 1 0 2 12
* 4 6 8 13 4 6 8 14
* 16 18 20 22 24
*/
}
}
Fast Full Search
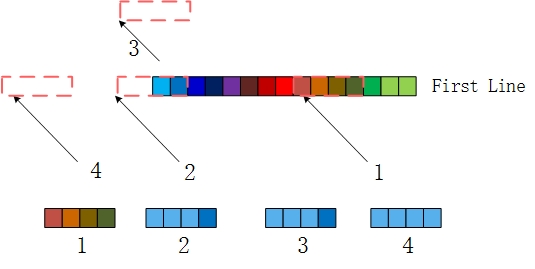
由于运动搜索时有多种块的类型(16x16,8x16,8x8,4x4等)因此,在全搜索时,会由于位置重叠而产生同一处的像素残差多次计算的情况,为了避免这种情况,可以一次性把搜索范围内的所有像素残差计算出来,不同块类型只需要把残差进行组合即可得到该类型的SAD

/*!
***********************************************************************
* \brief快速正像素搜索
* Fast Full pixel block motion search
* 目标是得到(mv_x,mv_y)和min_mcost,(mv_x,mv_y)指示从哪里开始做分像素搜索,search center
* 后者用来跟分像素搜索结果做比较
***********************************************************************
*/
int // ==> minimum motion cost after search
FastFullPelBlockMotionSearch (pel_t** orig_pic, // <-- not used
int ref, // <-- reference frame (0... or -1 (backward))
int list,
int pic_pix_x, // <-- absolute x-coordinate of regarded AxB block
int pic_pix_y, // <-- absolute y-coordinate of regarded AxB block
int blocktype, // <-- block type (1-16x16 ... 7-4x4)
int pred_mv_x, // <-- motion vector predictor (x) in sub-pel units
int pred_mv_y, // <-- motion vector predictor (y) in sub-pel units
int* mv_x, // --> motion vector (x) - in pel units
int* mv_y, // --> motion vector (y) - in pel units
int search_range, // <-- 1-d search range in pel units
int min_mcost, // <-- minimum motion cost (cost for center or huge value)
double lambda) // <-- lagrangian parameter for determining motion cost
{
int pos, offset_x, offset_y, cand_x, cand_y, mcost; int max_pos = (*search_range+)*(*search_range+); // number of search positions
int lambda_factor = LAMBDA_FACTOR (lambda); // factor for determining lagragian motion cost
int best_pos = ; // position with minimum motion cost
int block_index; // block index for indexing SAD array
int* block_sad; // pointer to SAD array block_index = (pic_pix_y-img->opix_y)+((pic_pix_x-img->opix_x)>>); // block index for indexing SAD array
block_sad = BlockSAD[list][ref][blocktype][block_index]; // pointer to SAD array //===== set up fast full integer search if needed / set search center =====
if (!search_setup_done[list][ref])//对一个参考帧只做一次
{
//计算搜索范围所有位置所有分块模式的SAD(整像素)
SetupFastFullPelSearch (ref, list);
} offset_x = search_center_x[list][ref] - img->opix_x; //搜索中心相对原宏块的偏移
offset_y = search_center_y[list][ref] - img->opix_y; //===== cost for (0,0)-vector: it is done before, because MVCost can be negative =====
//原点(这里的原点都是是当前块所在的位置)
if (!input->rdopt)
{
//把刚才计算的SAD 跟mv代价相加得到总代价
mcost = block_sad[pos_00[list][ref]] + MV_COST (lambda_factor, , , , pred_mv_x, pred_mv_y);
if (mcost < min_mcost)
{
min_mcost = mcost;
best_pos = pos_00[list][ref];//每帧搜索中心的位置
}
} //===== loop over all search positions =====
for (pos=; pos<max_pos; pos++, block_sad++)
{
//--- check residual cost ---
if (*block_sad < min_mcost)
{
//--- get motion vector cost ---
//计算出搜索位置,按照螺旋形顺序spiral_search_xy
cand_x = offset_x + spiral_search_x[pos];
cand_y = offset_y + spiral_search_y[pos];
mcost = *block_sad;//在SetupFastFullPelSearch已经做好
mcost += MV_COST (lambda_factor, , cand_x, cand_y, pred_mv_x, pred_mv_y); //计算 MV 代价 //--- check motion cost ---
if (mcost < min_mcost)
{
min_mcost = mcost;
best_pos = pos;
}
}
} //===== set best motion vector and return minimum motion cost =====
*mv_x = offset_x + spiral_search_x[best_pos];//根据代价最小,计算出最佳MV
*mv_y = offset_y + spiral_search_y[best_pos];
return min_mcost;
}
Edge Process
通常来说,计算SAD是以一行一行为单位进行,不过在进行搜索时,难免会有运动向量指向图像外的区域,图像以外的这些区域的像素取值为图像边界的值,即
$Pic[x,y]=\left\{\begin{matrix}
Pic[0,y] & x<0\\
Pic[width-1,y] & x\geq width\\
Pic[x,0] & 0\leq x < width,y<0\\
Pic[x,height-1] & 0\leq x < width,y \geq height\\
Pic[x,y] & other
\end{matrix}\right.$
/*如果参考块超出参考帧边界,用边界值进行填充*/
pel_t *UMVLineX (int size, pel_t* Pic, int y, int x, int height, int width)
{
int i, maxx;
pel_t *Picy; Picy = Pic + max(,min(height-,y)) * width; //先把y范围限制在(0,height-1)内 if (x < ) // Left edge
{
maxx = min(,x+size); //搜索范围可以大于16的,所以x+16是可以小于0的
for (i = x; i < maxx; i++) //把出界的部分都赋值为边界上的值,一画图就理解了
{
line[i-x] = Picy []; // Replicate left edge pixel
}
maxx = x+size; //把没出界的像素也拷贝到line数组中
for (i = ; i < maxx; i++) // Copy non-edge pixels
line[i-x] = Picy [i];
}
else if (x > width-size) // Right edge 同理
{
maxx = width;
for (i = x; i < maxx; i++)
{
line[i-x] = Picy [i]; // Copy non-edge pixels
}
maxx = x+size;
for (i = max(width,x); i < maxx; i++)
{
line[i-x] = Picy [width-]; // Replicate right edge pixel
}
}
else // No edge ,则返回y行x列的地址
{
return Picy + x;
} return line; //否则,返回line数组的地址
}
h.264全搜索以及快速全搜索算法的更多相关文章
- 12-低延迟、全接口(HMDI、DVI、YPb Pr、RGB)H.264全高清编码器解码器
低延迟.全接口(HMDI.DVI.YPb Pr.RGB)H.264全高清编码器解码器 一.产品介绍 1.近零延时的H.264压缩到1920x1080p60 该产品提供分辨率为1920x1080p6 ...
- H.265视频编码与技术全析(下)
H.265视频编码与技术全析(下) 四.帧内预测模式 共35个(h264有9个),包括Planar,DC,33个方向模式: 除了Intra_Angular预测外,HEVC还和H.264/MPEG-4 ...
- (私人收藏)[开发必备]最全Java离线快速查找手册(可查询可学习,带实例)
(私人收藏)[开发必备]最全Java离线快速查找手册(可查询可学习,带实例) https://pan.baidu.com/s/1L54VuFwCdKVnQGVc8vD1TQnwmj java手册 Ja ...
- H.265视频编码与技术全析(上)
H.265视频编码与技术全析(上) 一. 概述 作为新一代视频编解码格式,H.265得到越来越广泛的应用.不久之前,苹果公司在翘首期盼中发布了iPhone6,该款手机较之以往的iPhone,不仅仅只是 ...
- [LeetCode] Design Search Autocomplete System 设计搜索自动补全系统
Design a search autocomplete system for a search engine. Users may input a sentence (at least one wo ...
- oracle中索引快速全扫描和索引全扫描的区别
当进行index full scan的时候 oracle定位到索引的root block,然后到branch block(如果有的话),再定位到第一个leaf block, 然后根据leaf bloc ...
- 利用redis完成自动补全搜索功能(一)
最近要做一个搜索自动补全的功能(目前只要求做最前匹配),自动补全就是自动提示,类似于搜索引擎,再上面输入一个字符,下面会提示多个关键词供参考,比如你输入 nb 2字符, 会自动提示nba,nba录像, ...
- [LeetCode] 642. Design Search Autocomplete System 设计搜索自动补全系统
Design a search autocomplete system for a search engine. Users may input a sentence (at least one wo ...
- (私人收藏)[开发必备]最全JQuery离线快速查找手册(可查询可学习,带实例)
[开发必备]最全JQuery离线快速查找手册(可查询可学习,带实例) https://pan.baidu.com/s/16bUd4iA3p0c5RHbzaC60IQe4zh
随机推荐
- 【转】Android开发中的SQLite事务处理,即beginTransaction()方法
使用SQLiteDatabase的beginTransaction()方法可以开启一个事务,程序执行到endTransaction() 方法时会检查事务的标志是否为成功,如果程序执行到endTrans ...
- OpenCV LDA(Linnear Discriminant analysis)类的使用---OpenCV LDA演示样例
1.OpenCV中LDA类的声明 //contrib.hpp class CV_EXPORTS LDA { public: // Initializes a LDA with num_componen ...
- 搜搜(www.soso.com),I 老虎油!
搜搜(www.soso.com),I 老虎油! 太阳火神的漂亮人生 (http://blog.csdn.net/opengl_es) 本文遵循"署名-非商业用途-保持一致"创作公用 ...
- phpcms如何嵌套循环
PHPCMS V9的标签制作以灵活见长,可以自由DIY出个性的数据调用,对于制作有风格有创意的网站模板很好用,今天就介绍一个标签循环嵌套方法,可以实现对PC标签循环调用,代码如下: 在此文件里/php ...
- Android(java)学习笔记215:多线程断点下载的原理(JavaSE实现)
1. 为什么需要多线程下载? 服务器的资源有限,同时的平均地分配给每个客户端.开启的线程越多抢占的服务的资源就越多,下载的速度就越块. 2. 下载速度的限制条件? (1)你的电脑手机宽带的带宽 ...
- Spring.Net+NHibernate+asp.net mvc + easyui
毕业4个月的入手项目..前段时间在公司一直做的维护..为了弄明白自己也就跟着写了一个,目前也正在学习:不对的或者是有更好的还请各位赐教. 在学习的过程中主要参考::http://www.cnblogs ...
- (转)ThinkPHP使用心得分享-分页类Page的用法
转之--http://www.jb51.net/article/50138.htm ThinkPHP中的Page类在ThinkPHP/Extend/Library/ORG/Util/Page.clas ...
- java记事本
新知识点 1.撤销 textArea添加一个实现监听接口的类(添加了之后可以一直监视着添加的删除的情况,以便来撤销 textArea.getDocument().addUndoableEditList ...
- STL中的set容器
#include <iostream> #include <set> using namespace std; int main() { set<int> s; s ...
- 花非花-记一次linux上运行时报找不到库函数错误
简介: --->:表示依赖 exe ---> a.so ---> utility.so 问题描述: exe运行起来报a.so中的函数f未定义. 解决过程: 一·nm a.so nm ...