运行SVO
安装与运行的所有文档:https://github.com/uzh-rpg/rpg_svo/wiki
[1]没ros的似乎比较麻烦,首先依照ros的安装方法:
cd SVO
安装完后,在~/.cmake/packages/中可以看到Sophus(如果看不见在Home按ctrl+h即可,再按就隐藏)
mkdir -p rosbuild_ws/src
cd rosbuild_ws/src
git clone https://github.com/uzh-rpg/rpg_vikit.git
cd rosbuild_ws/src
git clone https://github.com/uzh-rpg/rpg_svo.git
用ros跑下载好的svo数据

你是不也遇到这个问题了?
忘记关键步骤了
$ cd <path_to_catkin_ws>
$ source devel/setup.bash
//显然这里忽略了对程序进行注册:也就是执行名为 setup.bash 的脚本文件,它是 catkin_make 在你工作区的 devel 子目录下生成的。
再执行上面的命令。
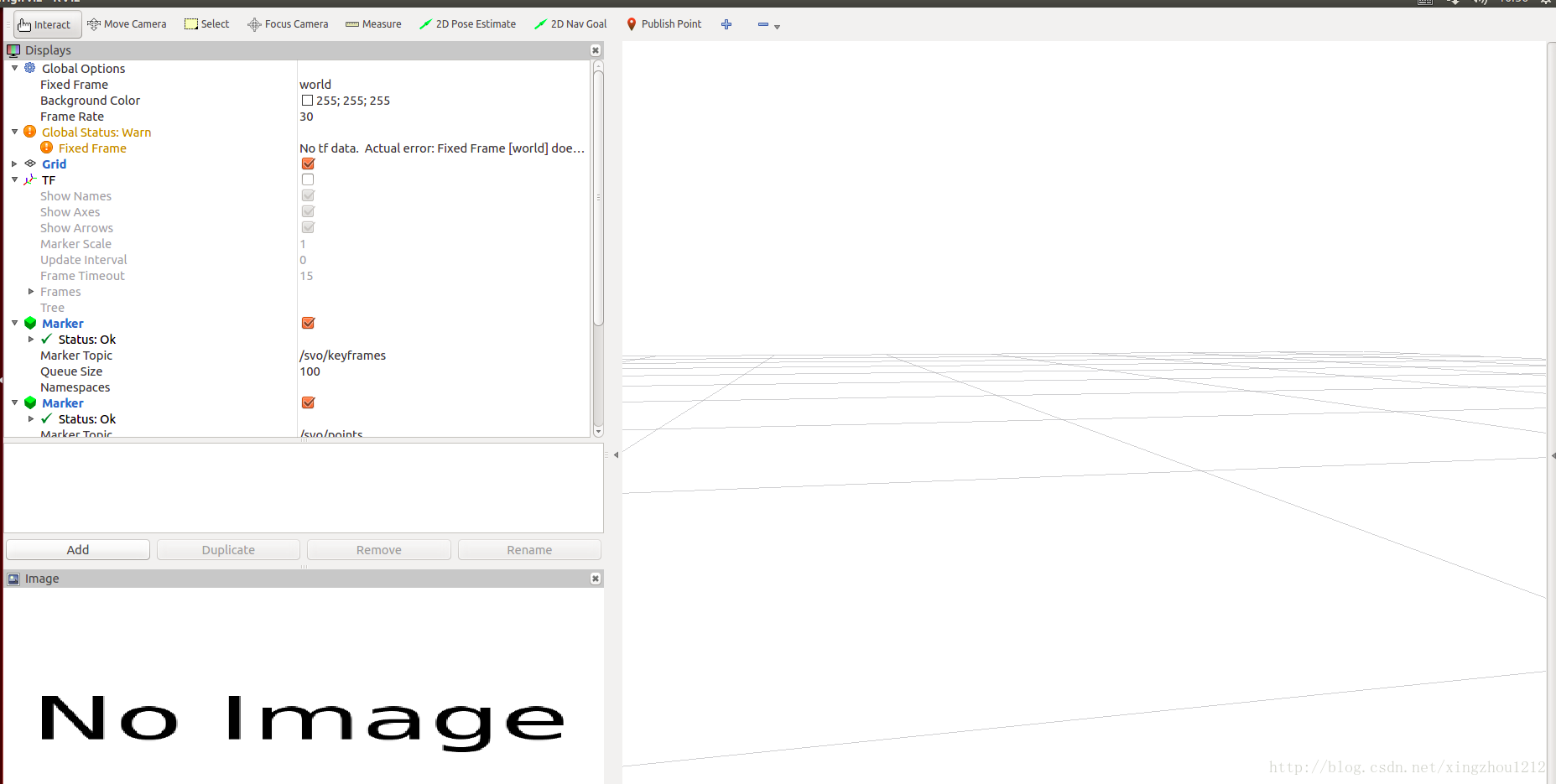
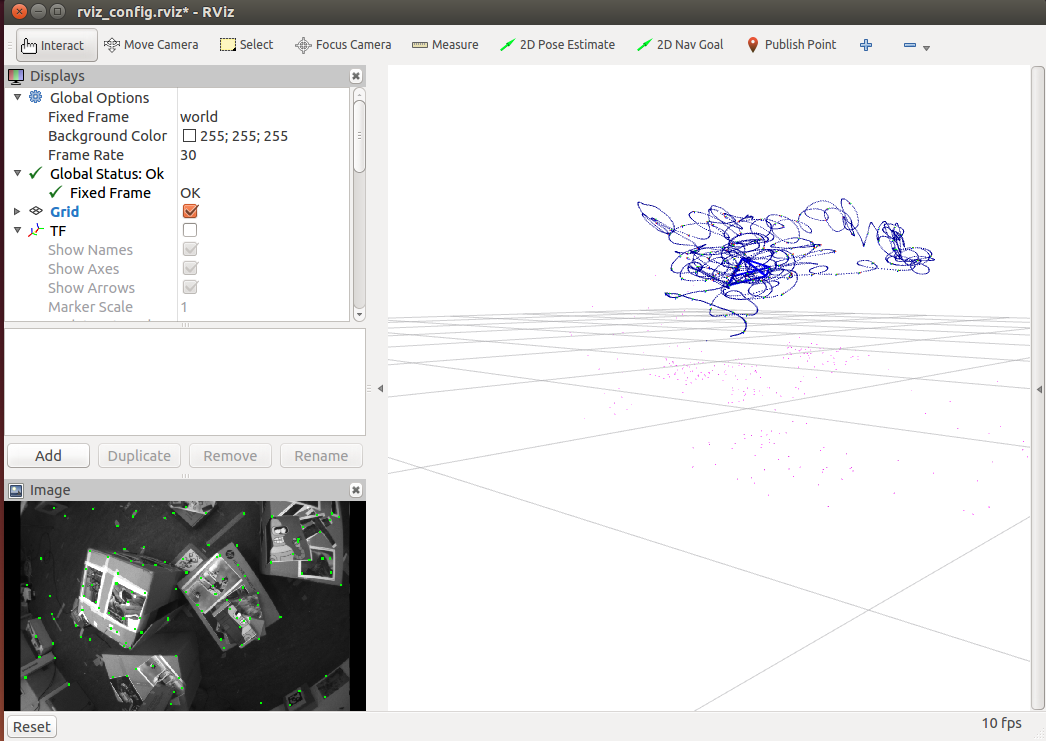
有了数据之后,程序就会运行,也可以看到可视化的轨迹了。
用 ros跑自己的摄像头采集的数据
[2]没ros的安装方法:
Boost - c++ Librairies (thread and system are needed)
sudo apt-get install libboost-all-dev
Eigen 3 - Linear algebra
apt-get install libeigen3-dev
OpenCV - Computer vision library for loading and displaying images(我之前就安装过了)
Follow the instructions at www.opencv.org
rpg_vikit/vikit_common/CMakeLists.txt USE_ROS to FALSE.)cd home/wj/Downloads/svo/svo
git clone https://github.com/uzh-rpg/rpg_vikit.gitcd rpg_vikit/vikit_common
mkdir build
cd build
cmake ..
make //在/rpg_vikit/vikit_common/bin生成了可执行文件 //rpg_vikit有3个文件夹:vikit_common;vikit_py;vikit_ros。最小二乘求解器中的固定设置先验vikit_common:
//生成了3个test可执行文件:test_vk_common_camera;vikit_common/bintest_vk_common_patch_score;test_vk_common_triangulation.
svo/CMakeLists.txt set the flag USE_ROS to FALSE.)cd home/wj/Downloads/svo/svo
mkdir build
cd build
cmake ..
make //在/svo/bin生成了可执行文件
Documentation---
---Instructions---
---Contributing---
--- Create a folder where you will store all datasets, e.g.:
cd ~
mkdir Datasets
In your .bashrc script, create a new environment variable pointing to the dataset folder:
export SVO_DATASET_DIR=${HOME}/Datasets
Source your new .bashrc script, go to the new dataset folder and download the test data:
source ~/.bashrc
cd ${SVO_DATASET_DIR}
wget http://rpg.ifi.uzh.ch/datasets/sin2_tex2_h1_v8_d.tar.gz -O - | tar -xz
Run SVO on the test data:
cd svo/bin
./test_pipeline
运行SVO的更多相关文章
- ubuntu16.04 ROS环境下配置和运行SVO
ubuntu16.04 ROS环境下配置和运行SVO https://blog.csdn.net/nnUyi/article/details/78005552
- SVO环境搭建
我是装了双系统,实验OS:Ubuntu14.04 Installation: Plain CMake (No ROS) 首先,建立一个工作目录比如:workspace,然后把下面的需要的都在该目录下进 ...
- pl-svo代码解读
pl-svo是在svo的基础上结合点和线特征的半直接法视觉里程计 程序启动通过app文件夹下的run_pipeline.cpp主程序启动,其它的函数文件统一放在src文件夹下,我们先从run_pipe ...
- SVO在ROS下的配置与运行
最近在做实验的时候,需要配置SVO,下面讲讲其中的过程以及遇到的问题: 首先说明配置环境:Ubuntu 14.04 + ROS indigo,ROS的安装我参考了ROS的官网上给出的教程:http:/ ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- 运行PL-SVO(单目)
代码:https://github.com/rubengooj/pl-svo 1.Prerequisites and dependencies (1)SVO 安装SVO,with ROS:https: ...
- SVO+PL-SVO+PL-StVO
PL-SVO是基于点.线特征的半直接法单目视觉里程计,我们先来介绍一下基于点特征的SVO,因为是在这个基础上提出的. [1]References: SVO: Fast Semi-Direct ...
- ASP.NET Aries 入门开发教程1:框架下载与运行
背景: 鉴于框架的使用者越来越多,文档太少,不少用户反映框架的入门门槛太高. 好吧,再辛苦下,抽时间写教程吧! 步骤1:下载框架源码 开源地址:https://github.com/cyq1162/A ...
- 在传统.NET Framework 上运行ASP.NET Core项目
新的项目我们想用ASP.NET Core来开发,但是苦于我们历史的遗产很多,比如<使用 JavaScriptService 在.NET Core 里实现DES加密算法>,我们要估计等到.N ...
随机推荐
- 转:display:flex不兼容Android、Safari低版本的解决方案 【flex布局】
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- python在DWR框架下的post
使用requests.post,但一直要在headers中设置相应的Content-Type和Referer # coding=utf-8 import urllib2 import requests ...
- highstock无图像
如果你的x轴是时间又是世纪秒的话又按以下设置的话,把xAxis的设置去掉试试看, 因为highstock会对世纪秒自动转换的 // xAxis: {// // max: 23, // min: 0, ...
- linux基本命令练习
1. 熟悉linux命令并且练习用法以及应用场景. 初学者完成Linux系统分区及安装之后,需熟练掌握Linux系统管理必备命令,命令包括:cd.ls.pwd.clear. chmod.chown.c ...
- css flex 属性教程
https://www.zhangxinxu.com/wordpress/2018/10/display-flex-css3-css/#align-self display: flex; flex-w ...
- docker run option
Usage: docker run [OPTIONS] IMAGE [COMMAND] [ARG...] Run a command in a new container Options: --add ...
- mysql查询记录修改时间于现在大于30分钟
(unix_timestamp(now())-`updatetime`)>1800
- php首字母 大写 数组去重复
$zimu[]=strtoupper(substr( $value['title'], 0, 1 ));//大写 $zimu[]=strtolower(substr( $value['title'], ...
- Genomic signatures of evolutionary transitions from solitary to group living(独居到社会性的转变)
1.摘要 群居性的进化是进化的主要过渡之一,但其背后的基因组变化是未知的.我们比较了10种蜜蜂的基因组,它们的社会复杂性各不相同,代表了社会进化中的多种独立过渡,并报告了三项主要发现. 第一,许多重要 ...
- ssh架构之hibernate(二)进阶学习
1.JPA入门 JPA的认识:JPA全称Java Persistence API.JPA通过JDK 5.0注解或XML描述对象-关系表的映射关系,并将运行期的实体对象持久化到数据库中Java持久层AP ...