ROS-1 : Ubuntu16.04中安装ROS Kinetic
1、安装
ROS Kinetic仅支持Wily(Ubuntu 15.10)、Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包。
1.1 配置Ubuntu 库
配置你的Ubuntu库允许“restricted”、“universe”和“multiverse”。可参阅 https://help.ubuntu.com/community/Repositories/Ubuntu 的指令完成上述配置。
1.2 设置sources.list
设置你的计算机接收来自packages.ros.org的软件:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
也可以使用其他镜像:http://wiki.ros.org/ROS/Installation/UbuntuMirrors 和源文件 Debs:http://wiki.ros.org/DebianPackageSources 。
1.3 设置密码
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
如果你在链接到keyserver时遇到问题,你可以在之前的命令中替换hkp://pgp.mit.edu:80 或hkp://keyserver.ubuntu.com:80。
1.4 安装
首先,保证你的Debian软件包索引是最新的:
sudo apt-get update
ROS中由很多不同的库和工具。此处提供四种默认配置来开启你的ROS之旅。你也可以单独安装ROS软件包。
在下一步遇到问题时,你可以使用以下的库代替上述( http://wiki.ros.org/ShadowRepository )提到的一些库。
**Desktop-Full Install : **(推荐)ROS,rqt,rviz,robot-generic libraries,2D/3D simulators,navigation and 2D/3D perception
sudo apt-get install ros-kinetic-desktop-full
**Desktop Install : ** ROS,rqt,rviz and robot-generic libraties
sudo apt-get install ros-kinetic-desktop
**ROS-Base : **(Bare Bones)ROS package build and communication libraries.No GUI tools.
sudo apt-get install ros-kinetic-ros-base
**Individual Package : **你也可以安装一个特定的ROS软件包(在短线后以软件包名代替):
sudo apt-get install ros-kinetic-PACKAGE
例如:
sudo apt-get install ros-kinetic-slam-gmapping
查找可用的软件包,可用:
apt-cache search ros-kinetic
1.5 初始化rosdep
在开始使用ROS前,你需要初始化rosdep。rosdep可保证你轻松地从源头安装你需要编译的系统附属项。在ROS中运行一些核心部分也需要rosdep。
sudo rosdep init
rosdep update
1.6 环境设置
每次打开一个新的shell,将自动地把ROS环境变量添加到你的bash部分,这是非常方便的:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你安装了多个版本的ROS,~/.bashrc必须仅获取你当前使用的ROS版本的setup.bash。
如果你只想改变你的当前shell的环境变量,你可以使用以下命令,而不是上述命令:
source /opt/ros/kinetic/setup.bash
如果你使用zsh,而不是bash,你需要运行以下命令来设置你的shell:
echo "source /opt/ros/kinetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
1.7 构建软件包的依赖项
到此为止你已经安装了运行ROS软件包所需的包。为创建和管理你自己的ROS工作空间,有多种多样的工具和单独分布的要求。例如,rosinstall是一个被频繁使用的命令行工具,可方便你使用一条命令轻松从ROS软件包下载很多源文件树。
要安装搭建ROS软件包的该工具和其他依赖项,运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8 搭建farm status
你安装的包由ROS build farm( http://build.ros.org/ )搭建。你可以检测单个包的状态( http://repositories.ros.org/status_page/ros_kinetic_default.html )。
2、测试与教程
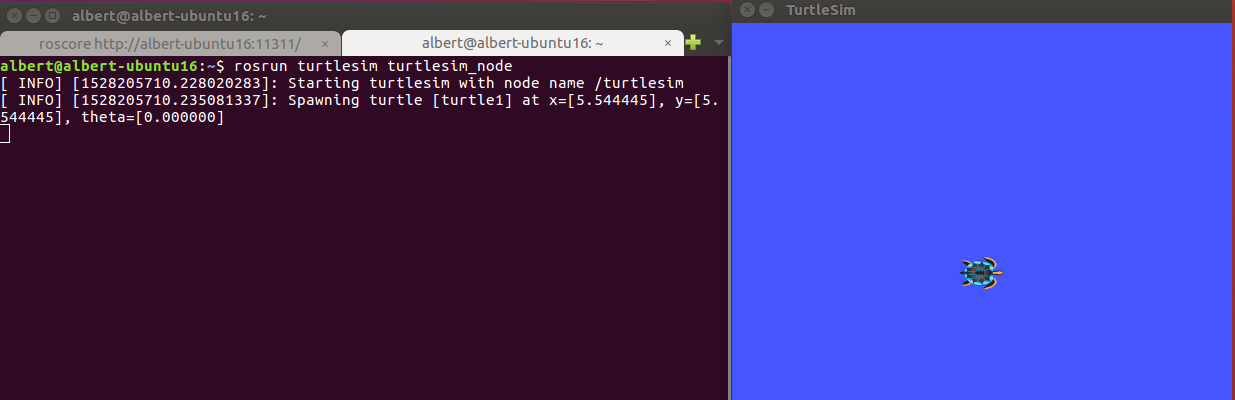
现在,为测试你的安装结果,打开一个终端窗口,输入以下指令:
roscore
在打开一个新终端窗口,输入以下指令:
rosrun turtlesim turtlesim_node
将出现一个小海龟的图形窗口,如下图。至此说明你的ROS安装基本没问题,完全可以正常运行了。
请参考ROS教程( http://wiki.ros.org/ROS/Tutorials )继续学习ROS,开启你的奇幻之旅吧。
ROS-1 : Ubuntu16.04中安装ROS Kinetic的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ubuntu16.04中安装stlink驱动
系统环境: Vmware12, Ubuntu16.04 Stlink version:v1.4.0 一.安装依赖包: sudo apt-get install libusb-1.0 sudo apt- ...
- 如何在Ubuntu16.04 中安装Linux, Nginx, MySQL, PHP (LEMP 栈)
介绍 LEMP 栈是用来开发动态网页和web 应用程序的一系列软件集合,LEMP描述的是Linux操作系统,Nginx web 服务器,以及后端数据存储MySQL/MariaDB数据库和服务器端动态脚 ...
- Docker - 在Ubuntu16.04中安装Docker CE
Get Docker for Ubuntu Check system version root@Ubuntu16:~# uname -a Linux Ubuntu16 4.8.0-36-generic ...
- 在ubuntu16.04中安装apache2+modsecurity以及自定义WAF规则详解
一.Modsecurity规则语法示例 SecRule是ModSecurity主要的指令,用于创建安全规则.其基本语法如下: SecRule VARIABLES OPERATOR [ACTIONS] ...
- Ubuntu16.04中安装搜狗输入法
1.从搜狗输入法官网界面下载安装包 https://pinyin.sogou.com/linux/ 2.安装 sudo dpkg -i sogoupinyin_2.1.0.0082_amd64.deb ...
- Ubuntu16.04中安装VirtualBox及简单配置
sudo apt-get -y install virtualbox 注:将该图表拖到桌面上即可 往下的过程都不变..... 将左边的菜单栏移动到下面 打开一个终端输入:gsettings set c ...
- ubuntu16.04中安装下载工具uget+aria2并配置chrome (stable版)
1.安装uGut sudo apt-get install uget 2.安装aria2 sudo apt-get install arias 3.配置uGet默认下载插件为aria2 菜单栏依次打开 ...
- 在Ubuntu16.04中安装Docker CE
apt-get install apt-transport-https ca-certificates curl software-properties-common curl -fsSL https ...
随机推荐
- [转]利用 Commons-Fileupload 实现文件上传
转载 Java Web开发人员可以使用Apache文件上传组件来接收浏览器上传的文件,该组件由多个类共同组成,但是,对于使用该组件来编写文件上传功能的Java Web开发人员来说,只需要了解和使用其中 ...
- 2 CSS盒子模型&边框&轮廓&外边距&填充&分组嵌套&尺寸&display与visibility
盒子模型 Box Model 所有HTML元素可以看做盒子,CSS模型本质上是一个盒子,封装周围的HTML元素 包括:边距,边框,填充和实际内容 盒子模型允许我们在其他元素和周围元素边框之间的空间放 ...
- Indexed (materialized) views in SQL Server,different with Oracle (materialized) views
Thanks to MS sql could have materialized views ,similar with oracle MVs, using indexed views. what i ...
- Python 基础之推导式
一.列表推导式 通过一行循环判断,遍历出一系列数据的方式就是推导式 特点:方便,简洁,可以实现一些简单的功能推导式当中只能跟循环和判断(单项分支)种类分为三种: 列表推导式 集合推导式 字典推导式 ...
- redis 之redis持久化rdb与aof
redis是内存型的数据库 重启服务器丢失数据 重启redis服务丢失数据 断电丢失数据 Redis是一种内存型数据库,一旦服务器进程退出,数据库的数据就会丢失,为了解决这个问题,Redis提供了两种 ...
- 至少你要了解RSS
本文概要: 1.RSS是什么,有什么作用? 2.是不是所有的网站都有RSS功能? 3.没有RSS功能的网站如何订阅? 4.RSS是否已经过时? 5.推荐一些热门的RSS订阅地址 1.RSS是什么,有什 ...
- 图层CALayer的使用
1.图层的意义 当UIView需要显示到屏幕上时,会调用drawRect:方法进行绘图,并且会将所有内容绘制在自己的图层上,绘制完毕后,系统会将图层拷贝到屏幕上,于是就完成了UIView的显示. ...
- 夯实Java基础(十六)——枚举类的使用
1.枚举类简介 枚举是仅容许特定数据类型值的有限集合.例如我们平时生活中星期一到星期日这七天就是一个特定的有限集合,一年四季的春夏秋冬也同样是的,它们都是枚举.枚举和我们数学中的集合非常相似,如果我们 ...
- HBase基准测试
执行命令: hbase org.apache.hadoop.hbase.PerformanceEvaluation 返回信息: [root@node1 /]# hbase org.apache.had ...
- require - 引入文件
导入 /** * Creates the node for the load command. Only used in browser envs. */ req.createNode = funct ...