Ros学习——移动机器人Ros导航详解及源码解析
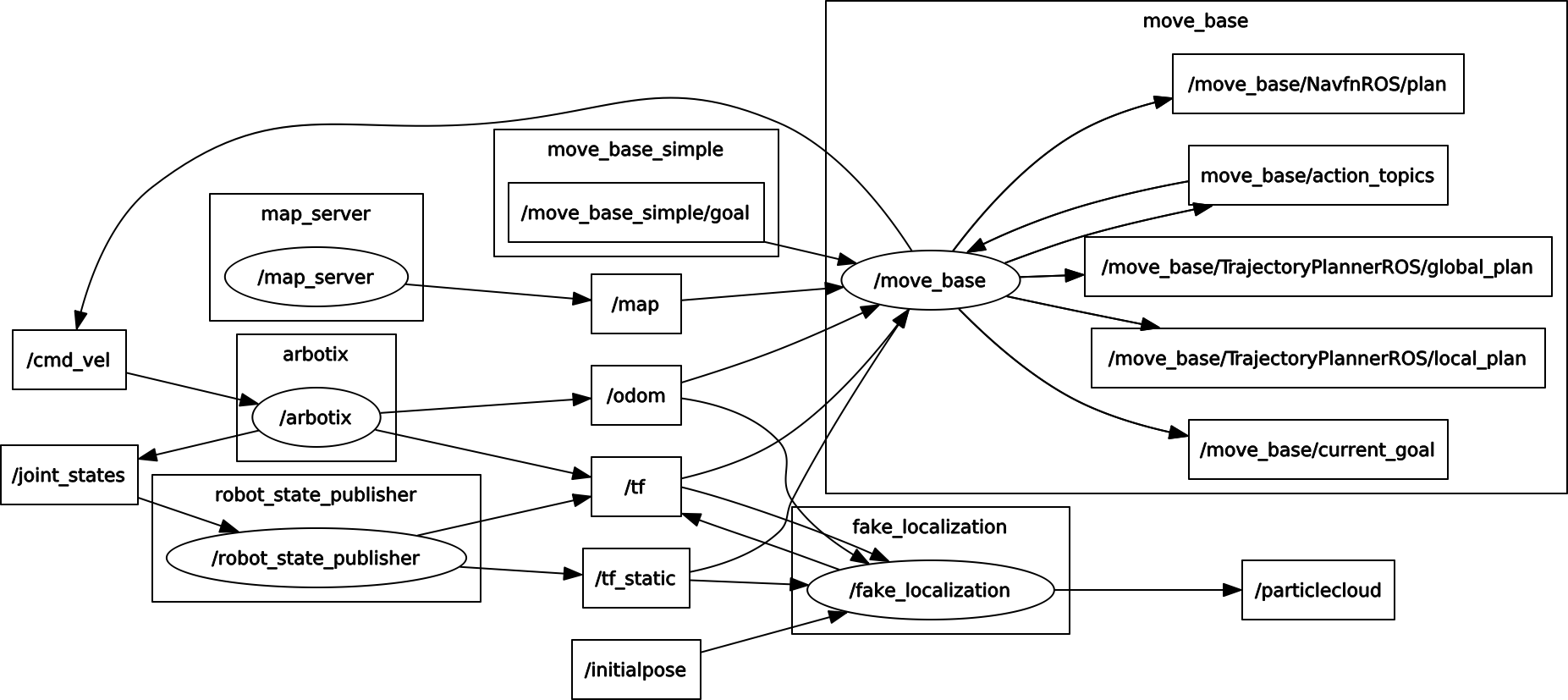
1 执行过程
- 1.运行仿真机器人fake_turtlebot.launch:加载机器人模型——启动机器人仿真器——发布机器人状态
- 2.运行amcl节点fake_amcl.launch:加载地图节点map_server——加载move_base节点——加载fake_localization节点(AMCL)
- 3.运行rviz
2 机器人仿真
//fake_turtlebot.launch <launch>
<param name="/use_sim_time" value="false" /> <!-- Load the URDF/Xacro model of our robot -->
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find rbx1_description)/urdf/turtlebot.urdf.xacro'" /> <param name="robot_description" command="$(arg urdf_file)" /> <node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen" clear_params="true">
<rosparam file="$(find rbx1_bringup)/config/fake_turtlebot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node> </launch>
2.1加载机器人模型turtlebot.urdf.xacro,包括:
1.硬件模型turtlebot_hardware.urdf.xacro
2.机器人本体模型turtlebot_body.urdf.xacro
3.标定参数turtlebot_calibration.xacro
4.运动学模型turtlebot_kinect.urdf.xacro
2.2 加载arbotix模拟器,即arbotix节点(加载配置文件:fake_turtlebot_arbotix.yaml)
port: /dev/ttyUSB0
baud: 115200
rate: 20
sync_write: True
sync_read: True
read_rate: 20
write_rate: 20 controllers: {
# Pololu motors: 1856 cpr = 0.3888105m travel = 4773 ticks per meter (empirical: 4100)
base_controller: {type: diff_controller, base_frame_id: base_footprint, base_width: 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 }
}
2.3 加载robot_state_publisher节点(设置频率publish_frequency:20)
3 机器人控制
//fake_amcl.launch <launch> <param name="use_sim_time" value="false" /> <!-- Set the name of the map yaml file: can be overridden on the command line. -->
<arg name="map" default="test_map.yaml" /> <!-- Run the map server with the desired map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find rbx1_nav)/maps/$(arg map)"/> <!-- The move_base node -->
<include file="$(find rbx1_nav)/launch/fake_move_base_amcl.launch" /> <!-- Run fake localization compatible with AMCL output -->
<node pkg="fake_localization" type="fake_localization" name="fake_localization" clear_params="true" output="screen">
<remap from="base_pose_ground_truth" to="odom" />
<param name="global_frame_id" value="map" />
<param name="base_frame_id" value="base_footprint" />
</node> </launch>
- 3.1加载地图服务器节点map_server,配置地图文件:test_map.yaml
image: test_map.pgm //包含占用数据的图像文件的路径; 可以是绝对的,或相对于YAML文件的位置
resolution: 0.050000 //地图的分辨率,米/像素
origin: [-13.800000, -12.200000, 0.000000] //地图中左下像素的2-D姿态为(x,y,yaw),偏航为逆时针旋转(yaw = 0表示无旋转)。系统的许多部分目前忽略偏航。
negate: 0 //白/黑自由/占用语义是否应该被反转(阈值的解释不受影响)
occupied_thresh: 0.9 //占据概率大于该阈值的像素被认为完全占用
free_thresh: 0.196 //占有概率小于该阈值的像素被认为是完全自由的
- 3.2加载movebase节点:fake_move_base_amcl.launch——>运行成本、机器人半径、到达目标位置的距离,机器人移动的速度
1.costmap_common_params.yaml:配置基本的参数,这些参数会被用于local_costmap和global_costmap.
obstacle_range: 2.5 //障碍物探测,引入地图
raytrace_range: 3.0 //用于机器人运动过程中,实时清除代价地图中的障碍物
#footprint: [[0.175, 0.175], [0.175, -0.175], [-0.175, -0.175], [-0.175, 0.175]] //将机器人的几何参数告诉导航功能包集,机器人和障碍物之间保持一个合理的距离
#footprint_inflation: 0.01
robot_radius: 0.175
inflation_radius: 0.2 //机器人与障碍物之间必须要保持的最小距离
max_obstacle_height: 0.6
min_obstacle_height: 0.0
observation_sources: scan //设定导航包所使用的传感器
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true, expected_update_rate: 0}
2.local_costmap_params.yaml;
local_costmap:
global_frame: map
robot_base_frame: base_footprint
update_frequency: 3.0 //发布信息的频率,也就是costmap可视化信息发布的频率
publish_frequency: 1.0
static_map: true
rolling_window: false //true:在机器人运动过程中,代价地图始终以机器人为中心
width: 6.0
height: 6.0
resolution: 0.01 //这三个是代价地图的的尺寸和分辨率,单位都是m
transform_tolerance: 1.0
3.global_costmap_params.yaml;
global_costmap:
global_frame: map //定义机器人和地图之间的坐标变换,建立全局代价地图必须使用这个变换。
robot_base_frame: base_footprint
update_frequency: 1.0 //地图更新的频率
publish_frequency: 1.0
static_map: true //是否使用一个地图或者地图服务器来初始化全局代价地图
rolling_window: false
resolution: 0.01
transform_tolerance: 1.0
map_type: costmap
4.base_local_planner_params.yaml;
controller_frequency: 3.0
recovery_behavior_enabled: false
clearing_rotation_allowed: false TrajectoryPlannerROS: //机器人的最大和最小速度限制值,也设定了加速度的限值
max_vel_x: 0.5
min_vel_x: 0.1
max_vel_y: 0.0 # zero for a differential drive robot
min_vel_y: 0.0
max_vel_theta: 1.0
min_vel_theta: -1.0
min_in_place_vel_theta: 0.4
escape_vel: -0.1
acc_lim_x: 1.5
acc_lim_y: 0.0 # zero for a differential drive robot
acc_lim_theta: 1.2 holonomic_robot: false //全向移动机器人那么此值为true
yaw_goal_tolerance: 0.1 # about 6 degrees
xy_goal_tolerance: 0.05 # 5 cm
latch_xy_goal_tolerance: false
pdist_scale: 0.4
gdist_scale: 0.8
meter_scoring: true heading_lookahead: 0.325
heading_scoring: false
heading_scoring_timestep: 0.8
occdist_scale: 0.05
oscillation_reset_dist: 0.05
publish_cost_grid_pc: false
prune_plan: true sim_time: 1.0
sim_granularity: 0.05
angular_sim_granularity: 0.1
vx_samples: 8
vy_samples: 0 # zero for a differential drive robot
vtheta_samples: 20
dwa: true
simple_attractor: false
5.nav_test_params.yaml
TrajectoryPlannerROS:
yaw_goal_tolerance: 6.28 # We don't care about orientation
xy_goal_tolerance: 0.1 # 10 cm
pdist_scale: 0.8
gdist_scale: 0.4
occdist_scale: 0.1
- 3.3加载fake_localization节点:ACML
3 Rviz显示
Ros学习——移动机器人Ros导航详解及源码解析的更多相关文章
- SpringBoot之DispatcherServlet详解及源码解析
在使用SpringBoot之后,我们表面上已经无法直接看到DispatcherServlet的使用了.本篇文章,带大家从最初DispatcherServlet的使用开始到SpringBoot源码中Di ...
- 详解HashMap源码解析(下)
上文详解HashMap源码解析(上)介绍了HashMap整体介绍了一下数据结构,主要属性字段,获取数组的索引下标,以及几个构造方法.本文重点讲解元素的添加.查找.扩容等主要方法. 添加元素 put(K ...
- AFNetworking 3.0 使用详解 和 源码解析实现原理
AFN原理&& AFN如何使用RunLoop来实现的: 让你介绍一下AFN源码的理解,首先要说说封装里面主要做了那些重要的事情,有那些重要的类(XY题) 一.AFN的实现步骤: NSS ...
- CharacterEncodingFilter详解及源码解析
字符编码过滤器 (Spring框架对字符编码的处理) 基于函数回调,对所有请求起作用,只在容器初始化时调用一次,依赖于servlet容器. web.xml配置文件 <filter> &l ...
- cas客户端流程详解(源码解析)--单点登录
博主之前一直使用了cas客户端进行用户的单点登录操作,决定进行源码分析来看cas的整个流程,以便以后出现了问题还不知道是什么原因导致的 cas主要的形式就是通过过滤器的形式来实现的,来,贴上示例配置: ...
- 六张图详解LinkedList 源码解析
LinkedList 底层基于链表实现,增删不需要移动数据,所以效率很高.但是查询和修改数据的效率低,不能像数组那样根据下标快速的定位到数据,需要一个一个遍历数据. 基本结构 LinkedList 是 ...
- 详解HashMap源码解析(上)
jdk版本:1.8 数据结构: HashMap的底层主要基于数组+链表/红黑树实现,数组优点就是查询块,HashMap通过计算hash码获取到数组的下标来查询数据.同样也可以通过hash码得到数组下标 ...
- 详解ConCurrentHashMap源码(jdk1.8)
ConCurrentHashMap是一个支持高并发集合,常用的集合之一,在jdk1.8中ConCurrentHashMap的结构和操作和HashMap都很类似: 数据结构基于数组+链表/红黑树. ge ...
- 基于双向BiLstm神经网络的中文分词详解及源码
基于双向BiLstm神经网络的中文分词详解及源码 基于双向BiLstm神经网络的中文分词详解及源码 1 标注序列 2 训练网络 3 Viterbi算法求解最优路径 4 keras代码讲解 最后 源代码 ...
随机推荐
- findContours()的使用崩溃问题
之前用的好好的,不知咱弄得就突然崩溃.然后网上搜了半天. 各种试,不行. 有一种改变代码方式的做法,可行,但是心里用着很是不爽.vector<vector<Point>>con ...
- (三)java程序的编译和执行
编写java程序 eg class Demo { /* * 程序运行的入口 */ public static void main(String[] args) { System.out.println ...
- [转载] FFMPEG视音频编解码零基础学习方法
在CSDN上的这一段日子,接触到了很多同行业的人,尤其是使用FFMPEG进行视音频编解码的人,有的已经是有多年经验的“大神”,有的是刚开始学习的初学者.在和大家探讨的过程中,我忽然发现了一个问题:在“ ...
- Oracle回收站 使用
查询回收站 SELECT * FROM RECYCLEBIN; SELECT * FROM USER_RECYCLEBIN; --USER_RECYCLEBING与RECYCLEBIN是同义词,字段完 ...
- C++11新特性之字节对齐、多参数模版、placement new
1. 内存对齐 #pragma pack(push, 1) struct A { char a; int b; double c; ]; }; #pragma pack(pop) #pragma pa ...
- 设计模式之组合(compose)模式
树形结构在软件中随处可见,比如操作系统中的目录结构,公司组织结构等等,如何运用面向对象的方式来处理这种树形结构是组合模式需要解决的问题.组合模式通过一种巧妙的设计方案来使得用户可以一致性地处理整个树形 ...
- 帮你彻底解决eclipse(myeclipse)中写struts.xml配置文件
其实,在自己写struts.xml的时候,竟然没有代码提示功能.让我非常的烦恼,其实解决这个问题的关键还是system不知道他的dtd的规则无法提示配置信息 很简单,那就让它知道就OK了!!! 道理明 ...
- python函数返回值
2016-08-09 15:01:38 python函数返回值使用return语句,可以返回任意类型的数.如果return语句执行,它之后的所有语句都不再执行. def func(x,y): pri ...
- Java问题:中间件是什么
和朋友聊天时被问到中间件是什么?一时有点语赛,感觉熟悉这个概念,但又完全不知道如何清楚的向别人讲这些. 网络上搜了一下,也没找到让自己很认可的说法,有的说非业务的技术类组件,是操作系统之上和业务逻辑之 ...
- 导出csv xls文件数字会自动变科学计数法的解决方式
将数据导出excel文件变成科学计数法问题: 分析: 用程序导出的csv文件,当字段中有比较长的数字字段存在时,在用excel软件查看csv文件时就会变成科学技术法的表现形式. 其实这个 ...