VSLAM技术框架详述
最早的SLAM雏形是在军事(核潜艇的海底定位)上的应用,主要传感器是军用雷达。SLAM技术发展到如今已经几十年,目前以激光雷达作为主传感器的SLAM技术比较稳定、可靠,仍然是主流的技术方案。但随着最近几年计算机视觉技术的快速发展,SLAM技术越来越多的应用于家用机器人、无人机、AR设备,基于视觉的Visual SLAM(简称VSLAM)逐渐开始崭露头角。今天就来帮大家普及下VSLAM的技术框架。
VSLAM技术架构
VSLAM的技术框架主要包括传感器数据预处理、前端、后端、回环检测、建图。
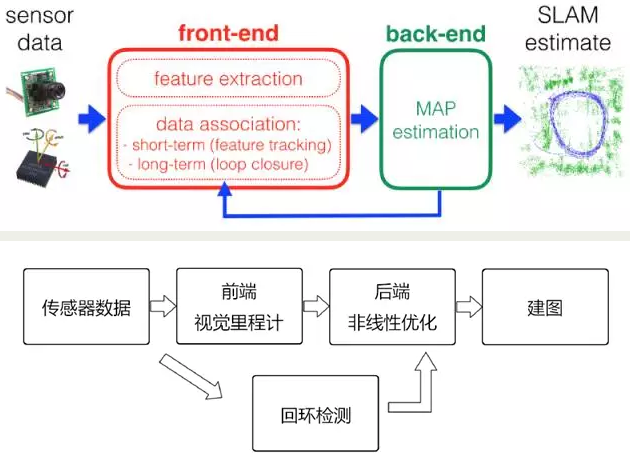
1、传感器数据
传感器数据预处理。这里的传感器包括摄像头、惯性测量单元(Inertial measurement unit,简称IMU)等,涉及传感器选型、标定、多传感器数据同步等技术。

2、前端
又称为视觉里程计(visual odometry,简称VO)。主要是研究如何根据相邻帧图像定量估算帧间相机的运动。通过把相邻帧的运动轨迹串起来,就构成了相机载体(如机器人)的运动轨迹,解决了定位的问题。然后根据估算的每个时刻相机的位置,计算出各像素的空间点的位置,就得到了地图。
VSLAM中,前端主要涉及计算机视觉相关的算法。典型做法一般是:首先提取每帧图像特征点,对相邻帧进行特征点粗匹配,然后利用RANSAC(随机抽样一致)算法去除不合理的匹配对,然后得到位置和姿态信息。整个过程涉及到特征提取、特征匹配、对极几何、PnP、刚体运动、李代数等多视图几何知识。
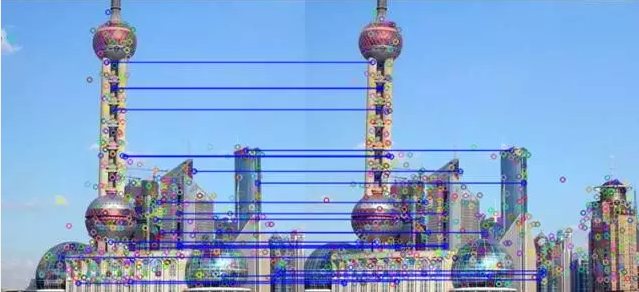
相邻图像特征点匹配
前面说视觉里程计只计算相邻帧的运动,进行局部估计,这会不可避免的出现累积漂移,这是因为每次估计两个图像间的运动时都有一定的误差,经过相邻帧多次传递,前面的误差会逐渐累积,轨迹漂移(drift)的越来越厉害。
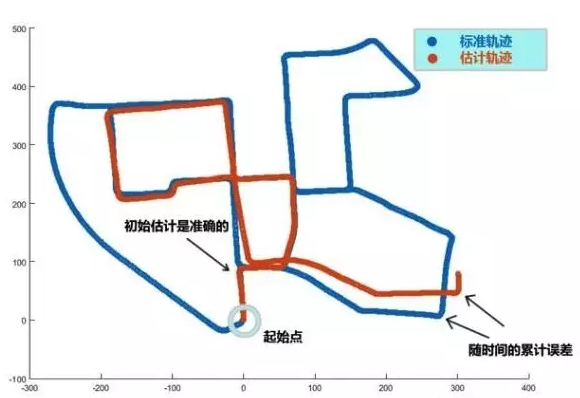
轨迹漂移现象
解决轨迹漂移的方法有两个:后端优化、回环检测。
3、后端
主要是对前端的结果进行优化,得到最优的位姿估计。主要有两种方法:
一种是基于滤波理论的优化,主要有 EKF, PF, RBPF, UKF等方法,其中EKF(扩展卡尔曼滤波)在早期是主流的方法。它的思路是将状态估计模型线性化,并用高斯分布近似其噪声,然后按照卡尔曼滤波进行预测来更新。但是实际上,这种对噪声的高斯分布大部分情况下是不成立的,此外,线性化过程中丢失了高阶项。
另一种就是非线性优化(图优化)。它的基本思想是将优化的变量作为图的节点,误差项作为图的边,在给定初值后,就可以迭代优化更新。由于图优化的稀疏性,可以在保证精度的同时,降低计算量。
后端优化涉及到的数学知识比较多,具有较高的难度。总的来说,从状态估计的角度来讲,SLAM是一个非线性非高斯系统。因此传统的滤波理论已经逐渐被抛弃,而图优化已经成为主流方法。
4、回环检测
主要目的是让机器人能够认识自己曾经去过的地方,从而解决位置随时间漂移的问题。视觉回环检测一般通过判断图像之间的相似性完成,这和我们人类用眼睛来判断两个相同的地点是一样的道理。因为图像信息丰富,因此VSLAM在回环检测中具有很大的优势。
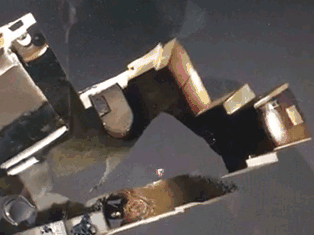
回环检测效果
当回环检测成功后,就会建立现在的图像和过去曾经见过图像的对应关系,后端优化算法可以根据这些信息来重新调整轨迹和地图,从而最大限度地消除累积误差。
5、建立地图
SLAM根据不同的传感器类型和应用需求建立不同的地图。常见的有2D栅格地图、2D拓扑地图、3D点云地图等。
比如前面提到过的扫地机器人,它只需要知道房屋内部的简单二维地图就可以了,不需要知道房屋到底有多高;它只需要知道哪里可以通过,哪里是障碍物,而不需要知道这个障碍物到底是什么,长什么样子;因此目前大部分具有SLAM功能的扫地机器人几乎都是采用廉价的消费级激光雷达方案,很少采用视觉SLAM方案(VSLAM也不够稳定)。
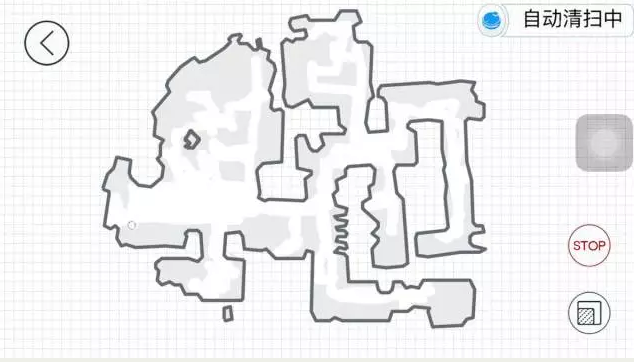
扫地机器人建立的2D地图
2D拓扑地图更强调地图元素之间的连通关系,而对精确的位置要求不高,去掉了大量地图的细节,是一种非常紧凑的地图表达方式。如下所示:
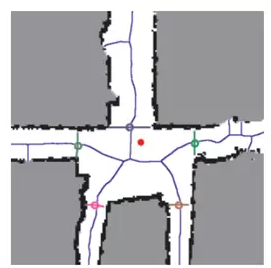
2D拓扑地图
3D点云地图在VSLAM中用的比较多,主要用于真实场景的视觉重建,重建的地图非常直观漂亮。但是点云地图通常规模很大,比如一张VGA分辨率(640 x 480)的点云图像,就会产生30万个空间点,这会占据非常大的存储空间,而且存在很多冗余信息。

3D点云地图
总结
前面介绍了VSLAM的典型技术框架。我们可以看到,将SLAM算法拆解后,用到的技术多是传统的计算机视觉算法,尤其是多视角几何相关知识。与当前大热的深度学习“黑箱模型”不同,SLAM的各个环节基本都是白箱,能够解释得非常清楚。但SLAM算法并不是上述各种算法的简单叠加,而是一个需要相互折中、密切配合的复杂系统工程。
VSLAM技术框架详述的更多相关文章
- App技术框架
一.App技术框架的类型 图1 三种App技术框架之间的关系 目前App的技术框架基本分为三种(图1): (1)Native App:互动型,iOS.Android.WP各一套,而且要维护历史版本,要 ...
- 你得知道这3个最基础的APP技术框架
出处:优设网作者:信籽链接:http://www.uisdc.com/3-basic-app-technical-framework 信籽(手淘设计师):不知道大家有没有遇到过这种情景,当你做好一个设 ...
- 3.Python编程语言基础技术框架
3.Python编程语言基础技术框架 3.1查看数据项数据类型 type(name) 3.2查看数据项数据id id(name) 3.3对象引用 备注Python将所有数据存为内存对象 Python中 ...
- Android常用的技术框架与博客社区
技术框架 图片加载 Glide Fresco Volley Picasso Universal Image Loader 网络请求 okhttp retrofit Volley android-asy ...
- J2EE 领域的一些技术框架结构图
J2EE 领域的一些技术框架结构图 阿里百川,开启移动应用开发的新篇章 1.Spring 架构图 Spring 是一个开源 框架,是为了解决企业应用程序开发复杂性而创建的.框架的主要优势之 ...
- "技术框架太多,多的眼花缭乱,如何在众多选择中找到自己的方向?
"技术框架太多,多的眼花缭乱,如何在众多选择中找到自己的方向?",经常有人这么问我. 咱们从开源项目说起,可以从两个维度来对开源项目进行分类,一方面是编程语言,另一方面是应用领域. ...
- java中异常这种技术框架是怎么工作的?
异常这种技术框架是怎么工作的?马克-to-win:注意是运行程序时,而不是编译时,当一个非正常情况出现,比如除0,就叫异常情况.马克-to- win:为了能优雅的处理异常情况(在出现异常情况后,程序不 ...
- 校友信息管理&SNS互动平台之技术框架选择
前言.提纲及说明: 请移步:<校友信息管理&SNS互动平台之前言.目录及说明>(博客园地址:http://www.cnblogs.com/s6cn/p/3516876.html) ...
- web前端技术框架选型参考
一.出发点 随着Web技术的不断发展,前端架构框架.UI框架.构建工具.CSS预处理等层出不穷,各有千秋.太多的框架在形成初期,都曾在web领域 掀起过一场技术浪潮,可有些却仅仅是昙花一现,随着他们用 ...
随机推荐
- bash shell笔记3 结构化命令二
原创作品,允许转载,转载时请务必以超链接形式标明文章 原始出处 .作者信息和本声明.否则将追究法律责任.http://twentyfour.blog.51cto.com/945260/513601 三 ...
- JVM 对象状态判断01
1 引用计数法 给一个对象添加一个引用计数器,每当有一个地方引用时,计数器加1,当引用失效的时候,计数器减去1.当计数器为0的时候,表示对象不可能再被使用.此时表明该对象可以被回收. ...
- eclipse检测不到android的手机
eclipse检测不到android设备我们一般重启adb server但是一般不管用,下面是重启adb server adb kill-server 可能出现“服务没有运行”的提示信息如下: * s ...
- OpenNebula 深入分析
-------------------OpenNebula 深入分析------------------- #容量清单 属性 描述 NAME 如果名字是空的,那么默认名字是:one-<VID&g ...
- Luogu 4473 [国家集训队]飞飞侠
BZOJ 2143 新技能:并查集优化最短路. 暴力最短路是$O(n^4)$的,然后拿个线段树优化一下连边就$O($能过$)$了. 但是这样都太慢了. 我们考虑一个点如果之前被更新过了,那么之后就不会 ...
- Java设计模式(1)——简单工厂模式
简单工厂模式属于类的创建型模式,又叫做静态工厂方法模式.通过专门定义一个类来负责创建其他类的实例,被创建的实例通常都具有共同的父类. 一.模式中包含的角色及其职责 1.工厂(Creator)角色 简单 ...
- HDU 6034 Balala Power! (贪心+坑题)
题意:给定一个 n 个字符串,然后问你怎么给 a-z赋值0-25,使得给定的字符串看成26进制得到的和最大,并且不能出现前导0. 析:一个很恶心的题目,细节有点多,首先是思路,给定个字符一个权值,然后 ...
- iOS编程——Objective-C KVO/KVC机制[转]
这两天在看和这个相关的的内容,全部推翻重写一个版本,这是公司内做技术分享的文档总结,对结构.条理做了更清晰的调整.先找了段代码,理解下,网上看到最多的一段的关于KVC的代码 先上代码 1. 1 ...
- LIRE教程之源码分析 | LIRE Tutorial of Analysis of the Source Code
LIRE教程之源码分析 |LIRE Tutorial of Analysis of the Source Code 最近在做地理图像识别和检索的研究,发现了一个很好用的框架LIRE,遂研究了一通.网上 ...
- document.domain 跨域问题
document.domain用来得到当前网页的域名. 比如在地址栏里输入:javascript:alert(document.domain); //www.315ta.com我们也可以给docume ...