Apollo学习笔记(一):canbus模块与车辆底盘之间的CAN数据传输过程
Apollo学习笔记(一):canbus模块与车辆底盘之间的CAN数据传输过程
博主现在从车载自组网信道分配和多跳路由转向了自动驾驶,没啥经验,想快些做出来个Demo还是得站在巨人的肩膀上才行,我选择了Apollo,主要还是支持国产而且它的开发者套件有现成的底盘可以直接跑起来,但是apollo系统结构比较复杂,各种花哨的设计模式(消息适配器、工厂模式等)绕得人头晕。日本那里有个autoware是基于原生ROS的,也用Apollo开发者套件跑了下,就是普通的机器人开发那套,难度适合学生用来做项目,还是得师夷长技以制夷,后面继续深入研究一下。(注意代码里面是有我写的注释的)
这次的学习是基于Apollo3.0的,因为3.0还是基于ROS的,后期研究autoware开发自己的系统能用得上,而且那个开发者套件也要用3.0。
canbus模块启动过程
参考知行合一2018大佬的Apollo Planning模块源代码分析可以知道canbus模块的主入口为modules/canbus/main.cc:
APOLLO_MAIN(apollo::canbus::Canbus);
该宏展开后为:
#define APOLLO_MAIN(APP) \
int main(int argc, char **argv) { \
google::InitGoogleLogging(argv[]); \
google::ParseCommandLineFlags(&argc, &argv, true); \
signal(SIGINT, apollo::common::apollo_app_sigint_handler); \
APP apollo_app_; \
ros::init(argc, argv, apollo_app_.Name()); \
apollo_app_.Spin(); \
return ; \
}
这里直接引用知行合一2018大神对于Apollo Planning模块的分析:
Main函数完成以下工作:始化Google日志工具,使用Google命令行解析工具解析相关参数,注册接收中止信号“SIGINT”的处理函数:apollo::common::apollo_app_sigint_handler(该函数的功能十分简单,就是收到中止信号“SIGINT”后,调用ros::shutdown()关闭ROS),创建apollo::planning::Planning对象:apollo_app_,初始化ROS环境,调用apollo_app_.Spin()函数开始消息处理循环。
————————————————
版权声明:本文为CSDN博主「知行合一2018」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/davidhopper/article/details/79176505
更详细的不再赘述,大家可以去上面链接学习。
在apollo_app_.Spin();函数内会依次调用modules/canbus/canbus.cc的Init()和Start()。
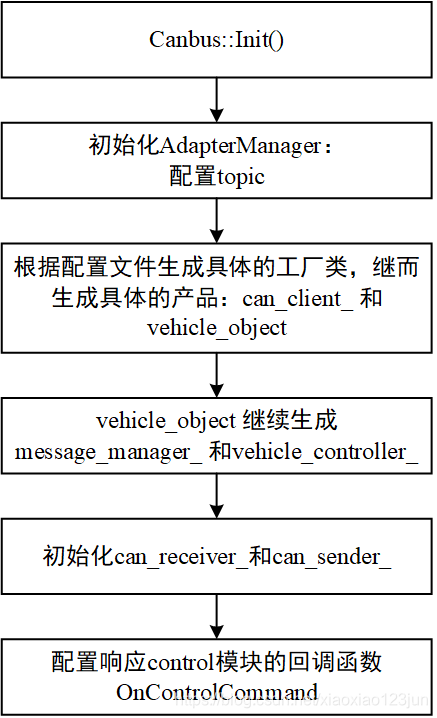
Init()主要过程源码分析
Status Canbus::Init() {
AdapterManager::Init(FLAGS_canbus_adapter_config_filename);/*完成AdapterManager的初始化,
FLAGS_canbus_adapter_config_filename对应于modules/canbus/common/canbus_gflags.cc中的
DEFINE_string(canbus_adapter_config_filename, "modules/canbus/conf/adapter.conf",
"The adapter config file");
adapter.conf中配置了canbus模块订阅和发布的topic
如果改成原生ROS的话,这里的AdapterManager配置删掉,改成ROS的topic订阅和发布*/
AINFO << "The adapter manager is successfully initialized.";
// load conf
//导入配置文件modules/canbus/conf/canbus_conf.pb.txt
/*
vehicle_parameter {
brand: LINCOLN_MKZ//指定车辆,后面生成对应的vehicle_factory,进而生成对应的message_manager_
max_enable_fail_attempt: 5
driving_mode: COMPLETE_AUTO_DRIVE
}
can_card_parameter {
brand: ESD_CAN//指定车辆,后面生成对应的can_client_
type: PCI_CARD
channel_id: CHANNEL_ID_ZERO
}
enable_debug_mode: false
enable_receiver_log: false
enable_sender_log: false
*/
//如果改成原生ROS的话此处也可以删除,工厂模式也可以放一边,上面导入的配置文件就是用来生成具体的产品工厂
//对象和产品对象,我们直接用ROS跑自己的工程一般车辆和CAN卡是固定的,可以改动后直接生成对应的产品对象
if (!common::util::GetProtoFromFile(FLAGS_canbus_conf_file, &canbus_conf_)) {
return OnError("Unable to load canbus conf file: " +
FLAGS_canbus_conf_file);
}
AINFO << "The canbus conf file is loaded: " << FLAGS_canbus_conf_file;
ADEBUG << "Canbus_conf:" << canbus_conf_.ShortDebugString();
// Init can client
auto *can_factory = CanClientFactory::instance();
can_factory->RegisterCanClients();
can_client_ = can_factory->CreateCANClient(canbus_conf_.can_card_parameter());
/*
std::unique_ptr<CanClient> CanClientFactory::CreateCANClient(
const CANCardParameter& parameter) {
auto factory = CreateObject(parameter.brand());//这里确定了新建的can client对象,
//此处新建的是ESD CAN卡对应的can client对象(ESD CAN卡是开发者套件用的CAN卡),具体为
//modules/drivers/canbus/can_client/esd/esd_can_client.cc的对象。
//由此也可以看出modules/canbus/与modules/drivers/canbus/之间的联系是很紧密的,
//modules/canbus/偏向上层的针对不同车辆的针对性数据解析
//modules/drivers/canbus/偏向底层的一些共性功能的实现,比如
//modules/drivers/canbus/can_comm/message_manager就是
//modules/canbus/vehicle/lincoln/lincoln_message_manager的父类
//改成原生ROS时这两个文件夹可以合到一起
if (!factory) {
AERROR << "Failed to create CAN client with parameter: "
<< parameter.DebugString();
} else if (!factory->Init(parameter)) {
AERROR << "Failed to initialize CAN card with parameter: "
<< parameter.DebugString();
}
return factory;
}
*/
if (!can_client_) {
return OnError("Failed to create can client.");
}
AINFO << "Can client is successfully created.";
VehicleFactory vehicle_factory;
vehicle_factory.RegisterVehicleFactory();
auto vehicle_object =
vehicle_factory.CreateVehicle(canbus_conf_.vehicle_parameter());//类似地生成具体的车辆对象
if (!vehicle_object) {
return OnError("Failed to create vehicle:");
}
message_manager_ = vehicle_object->CreateMessageManager();//生成对应车辆的message_manager_
if (message_manager_ == nullptr) {
return OnError("Failed to create message manager.");
}
AINFO << "Message manager is successfully created.";
//初始化can_receiver_,就是将can_client_、message_manager_赋给can_receiver_的成员变量
if (can_receiver_.Init(can_client_.get(), message_manager_.get(),
canbus_conf_.enable_receiver_log()) != ErrorCode::OK) {
return OnError("Failed to init can receiver.");
}
AINFO << "The can receiver is successfully initialized.";
//初始化can_sender_,就是将can_client_赋给can_sender_的成员变量
if (can_sender_.Init(can_client_.get(), canbus_conf_.enable_sender_log()) !=
ErrorCode::OK) {
return OnError("Failed to init can sender.");
}
AINFO << "The can sender is successfully initialized.";
//生成对应车辆的vehicle_controller_
//至此vehicle_object生成了message_manager_和vehicle_controller_
//message_manager_ 用来解析canbus从CAN接收到的消息
//vehicle_controller_ 用来更新canbus发往CAN的数据对象,也叫作协议类型数据
//(如刹车这个命令(协议)对应的对象,apollo将每种命令建了个类,比如林肯的刹车对应的类是
//modules/canbus/vehicle/lincoln/protocol/brake_60.h),
//也就是canbus接收到上层control的commond后通过vehicle_controller_
//更新协议类型数据内的具体成员变量(如刹车这个命令对应的对象内的“刹车量pedal_cmd_”这一成员变量)
vehicle_controller_ = vehicle_object->CreateVehicleController();
if (vehicle_controller_ == nullptr) {
return OnError("Failed to create vehicle controller.");
}
AINFO << "The vehicle controller is successfully created.";
/*vehicle_controller_->Init(...) (实际上是
modules/canbus/vehicle/lincoln/lincoln_controller.cc中的LincolnController::Init)里面
先生成brake_60_等协议类型数据,接着通过
can_sender_->AddMessage(Brake60::ID, brake_60_, false);等将brake_60_等协议类型数据
加入can_sender_的成员变量send_messages_(向量),后面can_sender_发送数据时就会将send_messages_
中的各个协议类型数据包含的CAN帧can_frame_to_send_发送到底盘
*/
if (vehicle_controller_->Init(canbus_conf_.vehicle_parameter(), &can_sender_,
message_manager_.get()) != ErrorCode::OK) {
return OnError("Failed to init vehicle controller.");
}
AINFO << "The vehicle controller is successfully initialized.";
CHECK(AdapterManager::GetControlCommand()) << "Control is not initialized.";
CHECK(AdapterManager::GetGuardian()) << "Guardian is not initialized.";
// TODO(QiL) : depreacte this
//类似原生ROS的添加回调函数,Apollo将topic的发布和订阅都集成到了AdapterManager进行统一管理
//Canbus::OnControlCommand就是canbus模块对上层cotrol_command的回调函数
if (!FLAGS_receive_guardian) {
AdapterManager::AddControlCommandCallback(&Canbus::OnControlCommand, this);
} else {
AdapterManager::AddGuardianCallback(&Canbus::OnGuardianCommand, this);
}
return Status::OK();
}
Init()主要过程流程图(为方便整合不严格按照代码里的顺序)
Start()主要过程源码分析
/*Init()生成的对象有can_client_ , vehicle_object , message_manager_,
vehicle_controller_ , can_receiver_ 和 can_sender_,
Start()里面就是调用can_client_, can_receiver_, can_sender_和vehicle_controller_的Start()将
它们的功能各自启动起来,比如can_client_ 的Start() (实际上是
modules/drivers/canbus/can_client/esd/esd_can_client.cc的Start())
就是调用third_party/can_card_library/esd_can/include/ntcan.h的内置函数canOpen()等设置端口等
以启动CAN卡,ntcan.h是买CAN卡的时候附带光盘里的文件,买了开发者套件装好CAN卡以后要把这个文件拷到
third_party/can_card_library/esd_can/include/下使用。因为ntcan.h是花钱买的所以就不把ntcan.h
的代码放上来了。 最后启动定时器循环运行Canbus::OnTimer,OnTimer这个函数就是发布底盘信息用的,发布以后
订阅底盘topic的上层模块就能接收到底盘信息。
*/
Status Canbus::Start() {
// 1. init and start the can card hardware
if (can_client_->Start() != ErrorCode::OK) {
return OnError("Failed to start can client");
}
AINFO << "Can client is started."; // 2. start receive first then send
if (can_receiver_.Start() != ErrorCode::OK) {
return OnError("Failed to start can receiver.");
}
AINFO << "Can receiver is started."; // 3. start send
if (can_sender_.Start() != ErrorCode::OK) {
return OnError("Failed to start can sender.");
} // 4. start controller
if (vehicle_controller_->Start() == false) {
return OnError("Failed to start vehicle controller.");
} // 5. set timer to triger publish info periodly
const double duration = 1.0 / FLAGS_chassis_freq;
timer_ = AdapterManager::CreateTimer(ros::Duration(duration),
&Canbus::OnTimer, this); // last step: publish monitor messages
apollo::common::monitor::MonitorLogBuffer buffer(&monitor_logger_);
buffer.INFO("Canbus is started."); return Status::OK();
}
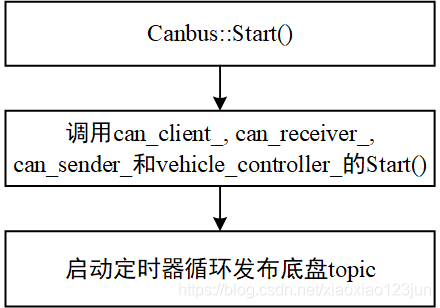
Start()主要过程流程图
下面分canbus模块向底盘发送数据和canbus模块从底盘接收数据两部分进行深入分析。
canbus模块向底盘发送数据
主要过程
canbus模块向底盘发送数据的开端在canbus模块接收到上层control_command,因此Canbus::OnControlCommand是发送的开端。
void Canbus::OnControlCommand(const ControlCommand &control_command) {
int64_t current_timestamp =
apollo::common::time::AsInt64<common::time::micros>(Clock::Now());
// if command coming too soon, just ignore it.
if (current_timestamp - last_timestamp_ < FLAGS_min_cmd_interval * ) {
ADEBUG << "Control command comes too soon. Ignore.\n Required "
"FLAGS_min_cmd_interval["
<< FLAGS_min_cmd_interval << "], actual time interval["
<< current_timestamp - last_timestamp_ << "].";
return;
}
last_timestamp_ = current_timestamp;
ADEBUG << "Control_sequence_number:"
<< control_command.header().sequence_num() << ", Time_of_delay:"
<< current_timestamp - control_command.header().timestamp_sec();
/*从此处开始的vehicle_controller_->Update(control_command)和can_sender_.Update()是关键
正如之前所提到的,vehicle_controller_->Update(control_command)用来更新协议类型数据的
成员变量,接着can_sender_.Update()把更新之后的数据通过can_frame_to_update_
赋值给can_frame_to_send_,can_sender_在Start()是开启的发送线程将can_frame_to_send_
通过CAN卡附带驱动内的canWrite()函数注入底盘CAN网络
这两个Update()涉及的函数比较多,中间挺多跳转,就不放源码了,跳转的过程在后面流程图中给出,具体代码的
实现大家还是需要自己去看代码
*/
if (vehicle_controller_->Update(control_command) != ErrorCode::OK) {
AERROR << "Failed to process callback function OnControlCommand because "
"vehicle_controller_->Update error.";
return;
}
can_sender_.Update();
}
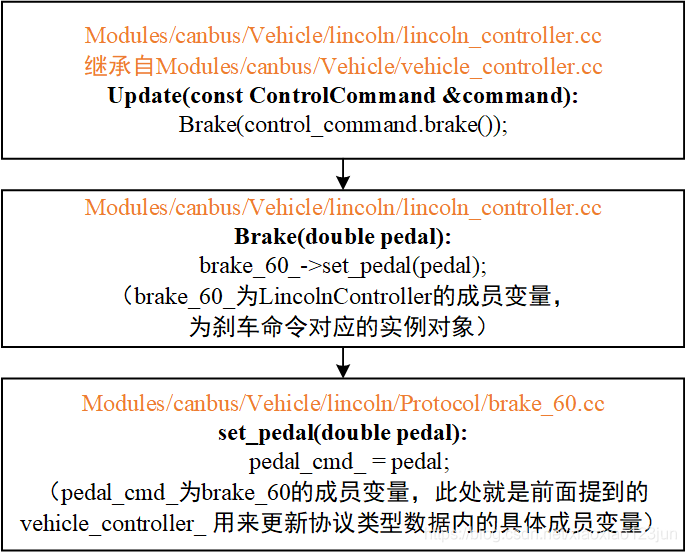
vehicle_controller_->Update流程图(以刹车对应的协议类型数据为例)
can_sender_.Update()流程图(以刹车对应的协议类型数据为例)

canbus模块从底盘接收数据
主要过程
在canbus Start()的时候,can_receiver_.Start()启动了从底盘接收数据的线程,线程内运行CanReceiver::RecvThreadFunc()
// 2. start receive first then send
if (can_receiver_.Start() != ErrorCode::OK) {
return OnError("Failed to start can receiver.");
}
AINFO << "Can receiver is started."; template <typename SensorType>
::apollo::common::ErrorCode CanReceiver<SensorType>::Start() {
if (is_init_ == false) {
return ::apollo::common::ErrorCode::CANBUS_ERROR;
}
is_running_ = true; thread_.reset(new std::thread([this] { RecvThreadFunc(); }));
if (thread_ == nullptr) {
AERROR << "Unable to create can client receiver thread.";
return ::apollo::common::ErrorCode::CANBUS_ERROR;
}
return ::apollo::common::ErrorCode::OK;
}
RecvThreadFunc()内循环运行can_client_->Receive(&buf, &frame_num)
template <typename SensorType>
void CanReceiver<SensorType>::RecvThreadFunc() {
AINFO << "Can client receiver thread starts.";
CHECK_NOTNULL(can_client_);
CHECK_NOTNULL(pt_manager_); int32_t receive_error_count = ;
int32_t receive_none_count = ;
const int32_t ERROR_COUNT_MAX = ;
std::chrono::duration<double, std::micro> default_period{ * }; while (IsRunning()) {
std::vector<CanFrame> buf;
int32_t frame_num = MAX_CAN_RECV_FRAME_LEN;
if (can_client_->Receive(&buf, &frame_num) !=
::apollo::common::ErrorCode::OK) {
/*
can_client_为modules/drivers/canbus/can_client/esd/esd_can_client.cc的实例化对象,
其Receive()函数调用了third_party/can_card_library/esd_can/include/ntcan.h的canRead函数从
CAN网络中读取数据并存入buf,
const int32_t ret = canRead(dev_handler_, recv_frames_, frame_num, nullptr);
buf的定义是std::vector<CanFrame> buf;
CanFrame在之前can_sender_.Update()流程图内有分析。
*/
LOG_IF_EVERY_N(ERROR, receive_error_count++ > ERROR_COUNT_MAX,
ERROR_COUNT_MAX)
<< "Received " << receive_error_count << " error messages.";
std::this_thread::sleep_for(default_period);
continue;
}
receive_error_count = ; if (buf.size() != static_cast<size_t>(frame_num)) {
AERROR_EVERY() << "Receiver buf size [" << buf.size()
<< "] does not match can_client returned length["
<< frame_num << "].";
} if (frame_num == ) {
LOG_IF_EVERY_N(ERROR, receive_none_count++ > ERROR_COUNT_MAX,
ERROR_COUNT_MAX)
<< "Received " << receive_none_count << " empty messages.";
std::this_thread::sleep_for(default_period);
continue;
}
receive_none_count = ; for (const auto &frame : buf) {
uint8_t len = frame.len;
uint32_t uid = frame.id;
const uint8_t *data = frame.data;
pt_manager_->Parse(uid, data, len);
/*
pt_manager_在Init时被赋值为message_manager_(modules/canbus/vehicle/lincoln
/lincoln_message_manager.cc的实例化对象),message_manager_用来解析从CAN网络获取的CanFrame
*/
if (enable_log_) {
ADEBUG << "recv_can_frame#" << frame.CanFrameString();
}
}
std::this_thread::yield();
}
AINFO << "Can client receiver thread stopped.";
}
接收CAN数据流程图

至于chassis_datail找不到的问题大家可以从https://blog.csdn.net/M_Alan_walker/article/details/88823610的最后面获得解答。
后记
博主主要是从https://blog.csdn.net/M_Alan_walker/article/details/88823610学习的,加入一些自己的理解,有些分析得不完善的地方大家在上面的网址可以得到更详细的补充。
Apollo学习笔记(一):canbus模块与车辆底盘之间的CAN数据传输过程的更多相关文章
- Python3学习笔记(urllib模块的使用)转http://www.cnblogs.com/Lands-ljk/p/5447127.html
Python3学习笔记(urllib模块的使用) 1.基本方法 urllib.request.urlopen(url, data=None, [timeout, ]*, cafile=None, ...
- Webpack4 学习笔记二 CSS模块转换
前言 此内容是个人学习笔记,以便日后翻阅.非教程,如有错误还请指出 webpack 打包css模块 webpack是js模块打包器, 如果在入口文件引入css文件或其它的less.sass等文件,需要 ...
- python自动化测试学习笔记-5常用模块
上一次学习了os模块,sys模块,json模块,random模块,string模块,time模块,hashlib模块,今天继续学习以下的常用模块: 1.datetime模块 2.pymysql模块(3 ...
- Android(java)学习笔记160:Framework运行环境之 Android进程产生过程
1.前面Android(java)学习笔记159提到Dalvik虚拟机启动初始化过程,就下来就是启动zygote进程: zygote进程是所有APK应用进程的父进程:每当执行一个Android应用程序 ...
- Android(java)学习笔记103:Framework运行环境之 Android进程产生过程
1. 前面Android(java)学习笔记159提到Dalvik虚拟机启动初始化过程,就下来就是启动zygote进程: zygote进程是所有APK应用进程的父进程:每当执行一个Android应用程 ...
- Android(java)学习笔记205:网易新闻RSS客户端应用编写逻辑过程
1.我们的项目需求是编写一个新闻RSS浏览器,RSS(Really Simple Syndication)是一种描述和同步网站内容的格式,是使用最广泛的XML应用.RSS目前广泛用于网上新闻频道,bl ...
- [C#] 类型学习笔记二:详解对象之间的比较
继上一篇对象类型后,这里我们一起探讨相等的判定. 相等判断有关的4个方法 CLR中,和相等有关系的方法有这么4种: (1) 最常见的 == 运算符 (2) Object的静态方法ReferenceEq ...
- Android(java)学习笔记148:网易新闻RSS客户端应用编写逻辑过程
1.我们的项目需求是编写一个新闻RSS浏览器,RSS(Really Simple Syndication)是一种描述和同步网站内容的格式,是使用最广泛的XML应用.RSS目前广泛用于网上新闻频道,bl ...
- [Python] Python学习笔记之常用模块总结[持续更新...]
作为一种极其简单的编程语言,Python目前成为了最炙手可热的几种语言之一.它不仅简单易学,而且它还为用户提供了各种各样的模块,功能强大,无所不能.有利必有弊,学习Python同样有困扰,其中之一就是 ...
随机推荐
- 利用Python进行数据分析:【Matplotlib】
一.简单介绍Matplotlib 1.Matplotlib是一个强大的Python绘图和数据可视化的工具包2.安装方法:pip install matplotlib 3.引用方法:import mat ...
- Spring MVC-从零开始-view-ViewResolver
主要ViewResolver简介 InternalResourceViewResolver 将逻辑视图名解析为一个路径 BeanNameViewResolver 将逻辑视图名解析为bean的name属 ...
- for for in 给已有的li绑定click事件生成新的li也有click事件
想要给已有的li元素绑定一个click事件,点击生成新的li元素,并且新的li元素也要有click事件 //不能用for循环给每个li绑定click事件 因为这样的话 后面新生成的li就没有click ...
- append追加的html片段,添加点击事件没有反应,解决!
对于追加的元素来说,属于未来展现的内容,我们此时不能使用一般点击事情处理,需要用未来事件绑定. 例如:我点击车牌号显示车辆详情,如下绑定. //绑定未来元素 $("body").d ...
- volatile 关键字的作用
简介Java 语言提供了一种稍弱的同步机制,即 volatile 变量,用来确保将变量的更新操作通知到其他线程.volatile 变量具备两种特性:变量可见性.禁止重排序. 作为同步锁在访问 vola ...
- dede tag标签静态化
看回那2个文件夹即可,txt说明书我已经修改过. 下面说一下tag标签静态化之后在内容页.列表页中如何使用. 内容页中沿用之前的方法即可: {dede:tag sort='new' getall='0 ...
- Docker详解(四) — Dockerfile剖析
目录 1.Dockfile简介 2. Dockerfile构建过程解析 3. Dockerfile体系结构 4. 案例 4.1 自定义mycentos 4.2 CMD/ENTRYPOINT 镜像案例 ...
- 品Spring:对@Autowired和@Value注解的处理方法
在Spring中能够完成依赖注入的注解有JavaSE提供的@Resource注解,就是上一篇文章介绍的. 还有JavaEE提供的@javax.inject.Inject注解,这个用的很少,因为一般都不 ...
- centos7.x 部署主、从DNS服务器
1.准备 例:两台192.168.219.146(主), 192.168.219.147(从), 域名www.panyangduola.com 主.从DNS服务器均需要安装bind.bind-chro ...
- egret引擎中使用tiled运行在微信小游戏中
egret的官方文档,对tiled的介绍不是很细致,很多东西都需要摸索.现在把踩的坑记录下来.作为一个备忘 引用tiledmap的库 在GitHub上下载egret的tiledmap支持库:https ...