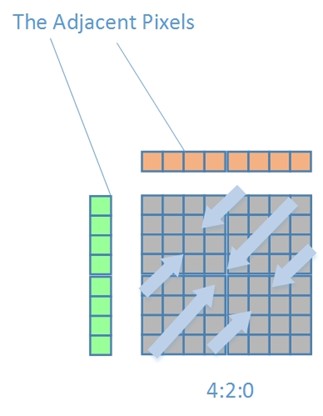
Intra Chroma Prediction
帧内预测依赖于当前宏块的相邻宏块,如果任何一个相邻宏块不可用,那么会直接影响到当前宏块的预测方式。
那么宏块怎么才谓之可用?
满足以下几个条件的相邻宏块为不可用:
- 相邻宏块超出边界,即(x<0 || x>PicWidthInMbs),(y<0 || y>PicHeightInMbs)
- 相邻宏块与当前处理的宏块不在同一slice
- 如果强制要求当前宏块的相邻宏块为intra(constrained_intra_pred_flag = 1),但实际上相邻宏块的编码方式为inter,该相邻宏块就不可用。
当然以上只适用于判断相邻宏块是否可用于intra预测;而对于inter预测,只要判断条件1与2;而在进行deblocking的情况下只需判断条件1。
(以下的"可用"都为"可用于Intra预测")
Intra Chroma Prediction
帧内色度预测有四种预测模式。
1 . Intra_Chroma_DC
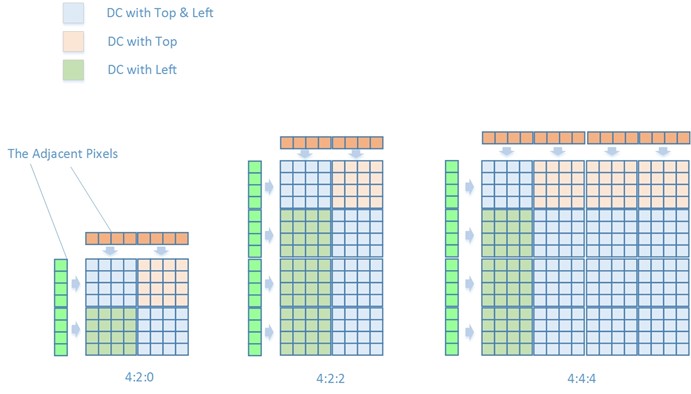
DC模式会选取相邻Chroma宏块的相应像素,取像素平均值来预测当前4x4块的像素值。由于预测块大小为4x4,因此相邻块像素值也取四个为一组:
$\begin{align*}
Sum_{up} &=\sum_{x=0}^{3}Pixel(x,-1)\\
Sum_{left} &=\sum_{y=0}^{3}Pixel(-1,y)\\
Sum_{default} &=1<<(BitDepth-1)
\end{align*}$
DC模式分为三种情况
- 如果Top与Left可用
$Pred_{4\times4}(x,y) = (Sum_{up} + Sum_{left})>>3$
- 否则如果只有Top或者只有Left可用
$ Pred_{4\times4}(x,y)=Sum_{up} >>2$ or $Pred_{4\times4}(x,y)=Sum_{left}>>2$
- 否则Top与Left都不可用
$Pred_{4\times4}(x,y)=Sum_{default}$
- 如果Top可用
$ Pred_{4\times4}(x,y)=Sum_{up} >>2$
- 否则如果left可用
$Pred_{4\times4}(x,y)=Sum_{left}>>2$
- 否则
$Pred_{4\times4}(x,y)=Sum_{default}$
- 如果left可用
$Pred_{4\times4}(x,y)=Sum_{left}>>2$
- 否则如果Top可用
$ Pred_{4\times4}(x,y)=Sum_{up} >>2$
- 否则
$Pred_{4\times4}(x,y)=Sum_{default}$
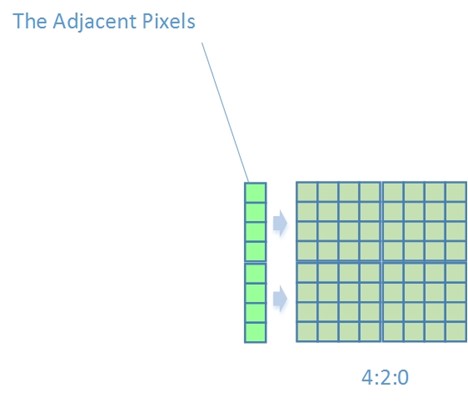
2 . Intra Chroma Horizon
只有当左相邻宏块的像素点Pixel(-1,y)被标记为可以用于帧内预测时才能采用这种预测方式
$Pred(x,y)=Pixel(-1,y)$
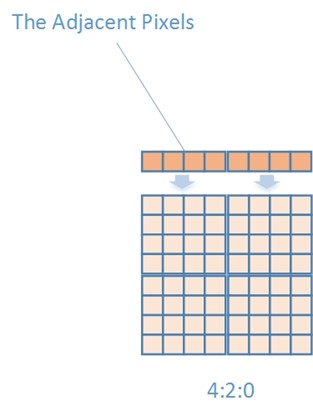
3 . Intra Chroma Vertical
只有当上方相邻宏块的像素点Pixel(x,-1)被标记为可以用于帧内预测时才能采用这种预测方式
$Pred(x,y)=Pixel(x,-1)$
4 . Intra Chroma Plane
只有当左相邻宏块像素点Pixel(-1,y)以及上方相邻宏块像素点Pixel(x,-1)都被标记为可以用于Intra预测时才能采用这种预测方式
首先我们来看标准中的两个式子
$\begin{align*}
H&=\sum_{x=0}^{3+xCF}(x+1)\times{(Pixel(4+xCF+x,-1)-Pixel(2+xCF-x,-1))}\\
V&=\sum_{y=0}^{3+yCF}(y+1)\times{(Pixel(-1,4+yCF+y)-Pixel(-1,2+yCF-y))}
\end{align*}$
由于xCF与yCF是YUV格式相关参数,当为0时表示为4:2:0
$\begin{align*}
H&=\sum_{x=0}^{3}(x+1)\times{(Pixel(4+x,-1)-Pixel(2-x,-1))}\\
V&=\sum_{y=0}^{3}(y+1)\times{(Pixel(-1,4+y)-Pixel(-1,2-y))}
\end{align*}$
我们在这里令$M= Pixel(4+x,-1)-Pixel(2-x,-1)$,令x为x轴,M为y轴,H为z轴,得到以下图像
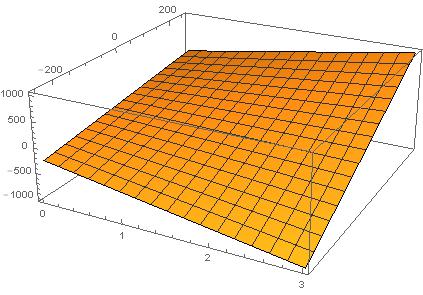
可以看出在x越大的情况下(趋向于宏块两端),如果M(两端像素差)越大,那么得到的值也就越大,因此该参数H表明了Pixel(x,-1)的变化趋势,是变大呢(H值很大),变小呢(H值为负,很小),还是平缓(H值在0附近)。
同理,V在y轴上也是这种情况。
按照上面的说法,这就是一个线性系数,那么我们就可以把H与V做一下调整,归一化得到线性系数b与c
$\begin{align*}
b &= (34+29\times{H})>>6 \\
c &= (34+29\times{V})>>6
\end{align*}$
得到系数后,再确定常量(基准值)就可以得到一个完整的式子了。那么如何确定基准值?这里假设像素是按照左下->右上的方式变化的,即像素值在该方向上线性变化。
那么取中心点为基准值,该基准值为左相邻宏块的最低端与上相邻宏块最右端的平均值
$Pred(3,3)=(Pixel(width-1,-1)+Pixel(-1,height-1))>>1$
$a =16\times{(Pixel(width-1,-1)+Pixel(-1,height-1))}$
最后得到预测公式
$Pred(x,y)=(a+b\times{(x-3-xCF)}+c\times{(y-3-yCF)}+16)>>5$
JM18.6
/*!
************************************************************************
* \brief
* Intra prediction of the chrminance layers of one macroblock
************************************************************************
*/
void intra_chroma_prediction (Macroblock *currMB, int *mb_up, int *mb_left, int*mb_up_left)
{
int s, i, j; int uv;
int b8, b4;
imgpel vline[16]; int mb_available_up;
int mb_available_left[2];
int mb_available_up_left; PixelPos pix_c; //!< pixel position p(0,-1)
PixelPos pix_d;
PixelPos pix_a; //!< pixel positions p(-1, -1..15) Slice *currSlice = currMB->p_Slice;
VideoParameters *p_Vid = currSlice->p_Vid;
InputParameters *p_Inp = currSlice->p_Inp;
int cr_MB_x = p_Vid->mb_cr_size_x;
int cr_MB_y = p_Vid->mb_cr_size_y;
imgpel **cur_pred = NULL; imgpel *hline = NULL; int yuv = p_Vid->yuv_format - 1;
int dc_pred_value_chroma = p_Vid->dc_pred_value_comp[1];
int max_imgpel_value_uv = p_Vid->max_pel_value_comp[1]; static const int block_pos[3][4][4]= //[yuv][b8][b4]
{
{ {0, 1, 2, 3},{0, 0, 0, 0},{0, 0, 0, 0},{0, 0, 0, 0}},
{ {0, 1, 2, 3},{2, 3, 2, 3},{0, 0, 0, 0},{0, 0, 0, 0}},
{ {0, 1, 2, 3},{1, 1, 3, 3},{2, 3, 2, 3},{3, 3, 3, 3}}
}; p_Vid->getNeighbour(currMB, -1, -1, p_Vid->mb_size[IS_CHROMA], &pix_d);
p_Vid->getNeighbour(currMB, -1, 0, p_Vid->mb_size[IS_CHROMA], &pix_a);
p_Vid->getNeighbour(currMB, 0, -1, p_Vid->mb_size[IS_CHROMA], &pix_c); mb_available_up = pix_c.available;
mb_available_up_left = pix_d.available;
mb_available_left[0] = mb_available_left[1] = pix_a.available; //强制要求相邻宏块使用帧内预测,否则不可用
if(p_Inp->UseConstrainedIntraPred)
{
mb_available_up = pix_c.available ? p_Vid->intra_block[pix_c.mb_addr] : 0;
mb_available_left[0] = mb_available_left[1] = pix_a.available ? p_Vid->intra_block[pix_a.mb_addr] : 0;
mb_available_up_left = pix_d.available ? p_Vid->intra_block[pix_d.mb_addr] : 0;
} if (mb_up)
*mb_up = mb_available_up;
if (mb_left)
*mb_left = mb_available_left[0];
if (mb_up_left)
*mb_up_left = mb_available_up_left; // compute all chroma intra prediction modes for both U and V
for (uv=0; uv<2; uv++)
{
imgpel **image = p_Vid->enc_picture->imgUV[uv];
imgpel ***curr_mpr_16x16 = currSlice->mpr_16x16[uv + 1]; // DC prediction
for(b8=0; b8<p_Vid->num_blk8x8_uv >> 1;b8++)
{
for (b4 = 0; b4 < 4; b4++)
{
int block_y = subblk_offset_y[yuv][b8][b4];
int block_x = subblk_offset_x[yuv][b8][b4];
int blk_x = block_x; s = dc_pred_value_chroma; //===== get prediction value =====
switch (block_pos[yuv][b8][b4])
{
case 0: //===== TOP LEFT =====
{
int s0 = 0, s2 = 0;
if (mb_available_up)
{
int pos_x = pix_c.pos_x + blk_x;
int pos_y = pix_c.pos_y; for (i = 0; i < BLOCK_SIZE; i++)
s0 += image[pos_y][pos_x++];
}
if (mb_available_left[0])
{
int pos_x = pix_a.pos_x;
int pos_y = pix_a.pos_y + block_y; for (i = 0; i < BLOCK_SIZE;i++)
s2 += image[pos_y++][pos_x];
}
if (mb_available_up && mb_available_left[0])
s = (s0 + s2 + 4) >> 3;
else if (mb_available_up)
s = (s0 + 2) >> 2;
else if (mb_available_left[0])
s = (s2 + 2) >> 2;
}
break;
case 1: //===== TOP RIGHT =====
{
int s1 = 0, s2 = 0;
if (mb_available_up)
{
int pos_x = pix_c.pos_x + blk_x;
int pos_y = pix_c.pos_y;
for (i = 0; i < BLOCK_SIZE; i++)
s1 += image[pos_y][pos_x++];
}
else if (mb_available_left[0])
{
int pos_x = pix_a.pos_x;
int pos_y = pix_a.pos_y + block_y; for (i = 0; i < BLOCK_SIZE; i++)
s2 += image[pos_y++][pos_x];
}
if (mb_available_up)
s = (s1 +2) >> 2;
else if (mb_available_left[0])
s = (s2 +2) >> 2;
}
break;
case 2: //===== BOTTOM LEFT =====
if (mb_available_left[0])
{
int pos_x = pix_a.pos_x;
int pos_y = pix_a.pos_y + block_y;
int s3 = 0; for (i = 0; i < BLOCK_SIZE; i++)
s3 += image[pos_y++][pos_x];
s = (s3 + 2) >> 2;
}
else if (mb_available_up)
{
int pos_x = pix_c.pos_x + blk_x;
int pos_y = pix_c.pos_y; int s0 = 0;
for (i = 0; i < BLOCK_SIZE; i++)
s0 += image[pos_y][pos_x++];
s = (s0 + 2) >> 2;
}
break;
case 3: //===== BOTTOM RIGHT =====
{
int s1 = 0, s3 = 0;
if (mb_available_up)
for (i=blk_x;i<(blk_x+4);i++)
s1 += image[pix_c.pos_y][pix_c.pos_x + i];
if (mb_available_left[0])
{
int pos_x = pix_a.pos_x;
int pos_y = pix_a.pos_y + block_y;
for (i = 0; i < BLOCK_SIZE;i++)
s3 += image[pos_y++][pos_x];
}
if (mb_available_up && mb_available_left[0])
s = (s1 + s3 + 4) >> 3;
else if (mb_available_up)
s = (s1 + 2) >> 2;
else if (mb_available_left[0])
s = (s3 + 2) >> 2;
}
break;
} //===== prediction =====
cur_pred = curr_mpr_16x16[DC_PRED_8];
for (j = block_y; j < block_y+4; j++)
{
for (i = block_x; i < block_x+4; i++)
{
cur_pred[j][i] = (imgpel) s;
}
}
}
} // vertical prediction
if (mb_available_up)
{
cur_pred = curr_mpr_16x16[VERT_PRED_8];
hline = &image[pix_c.pos_y][pix_c.pos_x];
for (j=0; j<cr_MB_y; j++)
memcpy(cur_pred[j], hline, cr_MB_x * sizeof(imgpel));
} // horizontal prediction
if (mb_available_left[0])
{
int pos_x = pix_a.pos_x;
int pos_y = pix_a.pos_y;
cur_pred = curr_mpr_16x16[HOR_PRED_8];
for (i=0; i<cr_MB_y; i++)
vline[i] = image[pos_y++][pos_x]; for (j=0; j<cr_MB_y; j++)
{
int predictor = vline[j];
for (i = 0; i < cr_MB_x; i++)
cur_pred[j][i] = (imgpel) predictor;
}
} // plane prediction
if (mb_available_left[0] && mb_available_up && mb_available_up_left)
{
int cr_x = (cr_MB_x >> 1);
int cr_y = (cr_MB_y >> 1); int iaa, iv, ib, ic;
int ih = cr_x * (hline[cr_MB_x-1] - image[pix_d.pos_y][pix_d.pos_x]); for (i = 0; i < cr_x - 1; i++)
ih += (i + 1)*(hline[cr_x + i] - hline[cr_x - 2 - i]); iv = cr_y * (vline[cr_MB_y-1] - image[pix_d.pos_y][pix_d.pos_x]);
for (i = 0; i < cr_y - 1; i++)
iv += (i + 1) * (vline[cr_y + i] - vline[cr_y - 2 - i]); if (cr_MB_x == 8)
ib = (17 * ih + 2 * cr_MB_x) >> 5;
else
ib = ( 5 * ih + 2 * cr_MB_x) >> 6; if (cr_MB_y == 8)
ic = (17 * iv + 2 * cr_MB_y) >> 5;
else
ic = ( 5 * iv + 2 * cr_MB_y) >> 6; iaa = 16 * (hline[cr_MB_x - 1] + vline[cr_MB_y - 1]);
cur_pred = curr_mpr_16x16[PLANE_8];
iaa += (1 - cr_x) * ib + (1 - cr_y) * ic;
for (j = 0; j < cr_MB_y; j++)
for (i = 0; i < cr_MB_x; i++)
cur_pred[j][i]= (imgpel) iClip1( max_imgpel_value_uv, (iaa + i * ib + j * ic + 16)>>5);
}
} if (!p_Inp->rdopt) // the rd-opt part does not work correctly (see encode_one_macroblock)
{ // since ipredmodes could be overwritten => encoder-decoder-mismatches
currSlice->rdo_low_intra_chroma_decision(currMB, mb_available_up, mb_available_left, mb_available_up_left);
}
}
Intra Chroma Prediction的更多相关文章
- Intra Luma Prediction
在宏块的帧内预测过程中,有四种宏块类型:I_4x4,I_8x8,I16x16,I_PCM.他们都需要在相邻块做去块滤波之前进行帧内预测. 亮度帧内预测的总体流程 1-4获取当前block的帧内预测模式 ...
- h.264语法结构分析
NAL Unit Stream Network Abstraction Layer,简称NAL. h.264把原始的yuv文件编码成码流文件,生成的码流文件就是NAL单元流(NAL unit Stre ...
- h.264宏块与子宏块类型
宏块类型mb_type 宏块类型表示的是宏块不同的分割和编码方式,在h.264的语法结构中,宏块类型在宏块层(macroblock_layer)中用mb_type表示(请参考h.264语法结构分析中的 ...
- [ffmpeg] h.264解码所用的主要缓冲区介绍
在进行h264解码过程中,有两个最重要的结构体,分别为H264Picture.H264SliceContext. H264Picture H264Picture用于维护一帧图像以及与该图像相关的语法元 ...
- x264阅读记录-2
x264阅读记录-2 7. x264_encoder_encode函数-1 查看该函数代码(Encoder.c文件)可以发现,该函数中注释很详细,对编码的整个步骤展示的也相对比较清晰. 在查看具体的代 ...
- 解决ffmpeg拉流转发频繁丢包问题max delay reached. need to consume packet
软件: 1.流媒体服务器EasyDarwin-windows-8.1.0-1901141151 2.ffmpeg-20181001-dcbd89e-win64-static 3.直播源:rtsp:// ...
- 【二】H.264/MPEG-4 Part 10 White Paper 翻译之 Prediction of Intra Macroblocks
翻译版权所有,转载请注明出处~ xzrch@2018.09.14 ------------------------------------------------------------------- ...
- x264源代码简单分析:宏块分析(Analysis)部分-帧内宏块(Intra)
===================================================== H.264源代码分析文章列表: [编码 - x264] x264源代码简单分析:概述 x26 ...
- 【HEVC帧间预测论文】P1.4 Motion Vectors Merging: Low Complexity Prediction Unit Decision
Motion Vectors Merging: Low Complexity Prediction Unit Decision Heuristic for the inter-Prediction o ...
随机推荐
- CSS3伪类选择器 图示
- Directx 3D编程实例:绘制可变速旋转的三角形
最近朋友建议我写一些关于微软云技术的博客留给学校下一届的学生们看,怕下一届的MSTC断档.于是我也觉的有这个必要. 写了几篇博客之后,我觉得也有必要把这一年的学习内容放在博客做个纪念,就这样写了本篇博 ...
- InnoDB 数据表压缩原理与限制
http://liuxin1982.blog.chinaunix.net/uid-24485075-id-3523032.html 压缩理念 通过提高CPU利用率和节约成本,降低数据库容量及I/O负载 ...
- Understanding Extension Class Loading--官方
http://docs.spring.io/spring-amqp/docs/1.3.6.RELEASE/reference/html/sample-apps.html#d4e1285 http:// ...
- sbt 配置
1. SBT使用local maven repository,下载的库依然放在 ~/.m2/repository 2. SBT assembly 会把依赖库打包到一个jar包,需要使用assembly ...
- [转] 设计模式 -- Facade
PS:Façade模式注重简化接口,Adapter模式注重转换接口,Bridge模式注重分离接口(抽象)与其实现,Decorator模式注重稳定接口的前提下为对象扩展功能. Facade模式 Faca ...
- C++对象模型学习笔记
1. 全局变量是如何初始化的 //global var A a; int main() { cout<<a<<endl; ; } 如上述例子,全局变量a是在main()函数之前 ...
- UIView不能使用UITableView的Static表格的解决方法
在UIView中嵌入一个Container,用Container来包含UITableViewController即可,到storyboard上显示如下:
- 模板-->欧几里得算法
如果有相应的OJ题目,欢迎同学们提供相应的链接 相关链接 所有模板的快速链接 简单的测试 None 代码模板 /* * TIME complexity:O(logN) means very fast. ...
- 使用MWC四轴起飞侧翻解决方法
原因如下:1.电机顺序错了,如上图所示,上面蓝色的箭头是机头,绿色的箭头是电机转向,3.10.11.9对应MWC飞控版上的D3,D9,D11,D9,蓝色箭头对应MWC飞控板的箭头 或者传感器的Y轴 以 ...