开发者说 | Apollo控制算法之汽车动力学模型和LQR控制
动力学主要研究作用于物体的力与物体运动的关系。
车辆动力学模型一般用于分析车辆的平顺性和车辆操纵的稳定性。
对于车来说,研究车辆动力学,主要是研究车辆轮胎及其相关部件的受力情况。
比如纵向速度控制,通过控制轮胎转速实现;
横向航向控制,通过控制轮胎转角实现。
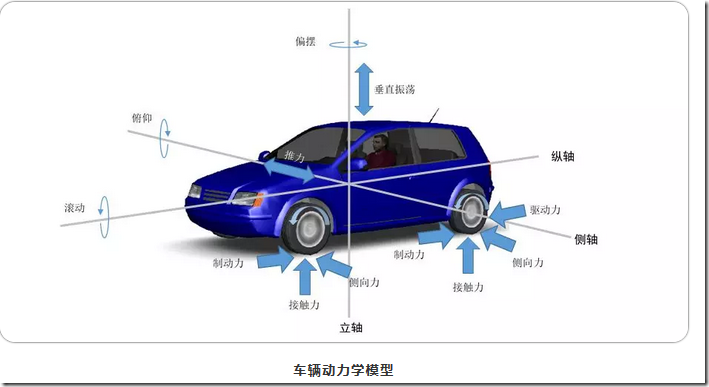
正常情况下,车辆上的作用力沿着三个不同的轴分布:
纵轴上的力包括驱动力和制动力,以及滚动阻力和拖拽阻力作滚摆运动;
横轴上的力包括转向力、离心力和侧风力,汽车绕横轴作俯仰运动;
立轴上的力包括车辆上下振荡施加的力,汽车绕立轴作偏摆或转向运动。
无论是LQR或是MPC控制,都需要有车辆的模型作为基础。
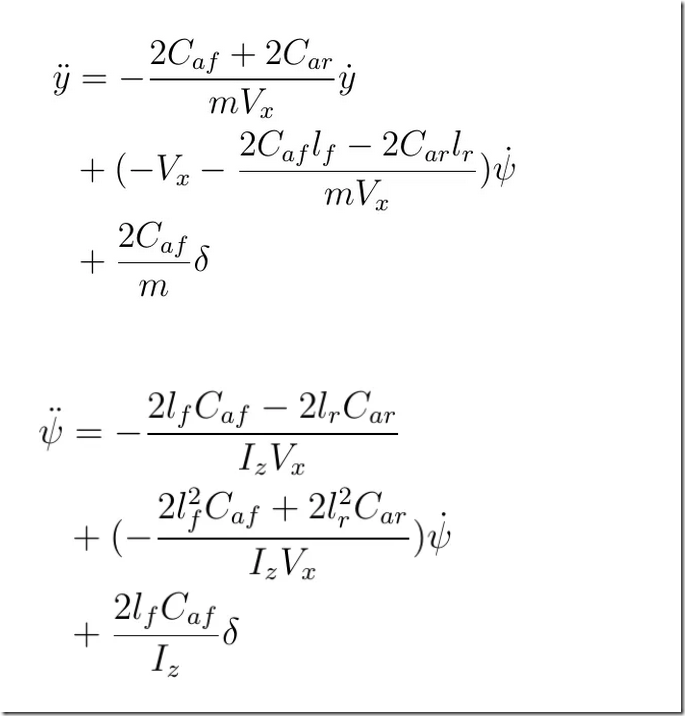
动力学模型
小角度侧偏角
匀速
不考虑环境因素

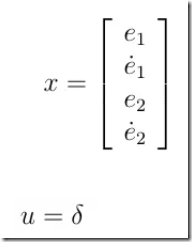
设e1为横向偏差,e2为航向角偏差,
进而得:
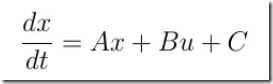
其中

其中:
LQR 理论是现代控制理论中发展最早也最为成熟的一种状态空间设计法。特别可贵的是,LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。
LQR 最优设计是指设计出的状态反馈控制器 K 要使二次型目标函数 J 取最小值,而 K 由权矩阵 Q 与 R 唯一决定,故此 Q、R 的选择尤为重要。
而且 Matlab 的应用为 LQR 理论仿真提供了条件,更为我们实现稳、准、快的控制目标提供了方便。
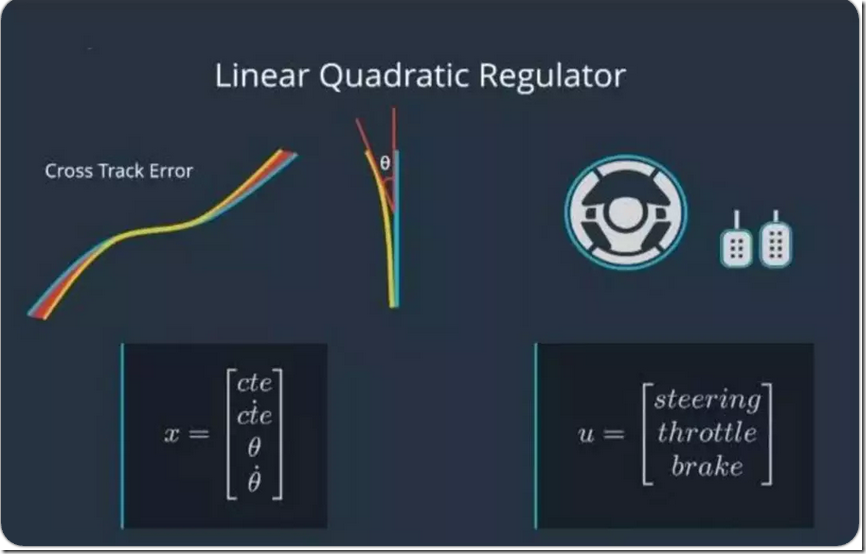
线性二次调节器(Linear Quadratic Regulator 或LQR)是基于模型的控制器,它使用车辆的状态来使误差最小化。
Apollo 使用 LQR 进行横向控制。横向控制包含四个组件:
横向误差
横向误差的变化率
朝向误差
朝向误差的变化率
变化率与导数相同,我们用变量名上面的一个点来代表。
我们称这四个组件的集合为X,这个集合X捕获车辆的状态。除了状态之外,该车有三个控制输入:转向、加速和制动。我们将这个控制输入集合称为U。
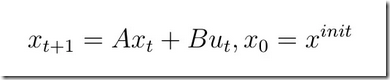
我们考虑有如下离散线性系统:
为了达到上述效果,定义代价函数:
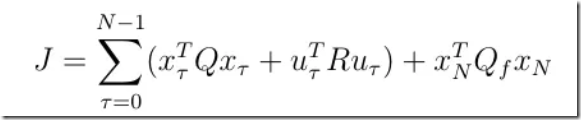
其中x为状态量,u为控制量,Q为状态权重矩阵,R为控制权重矩阵,
 为最终状态权重矩阵,N为到达最终状态的控制序列数。
为最终状态权重矩阵,N为到达最终状态的控制序列数。
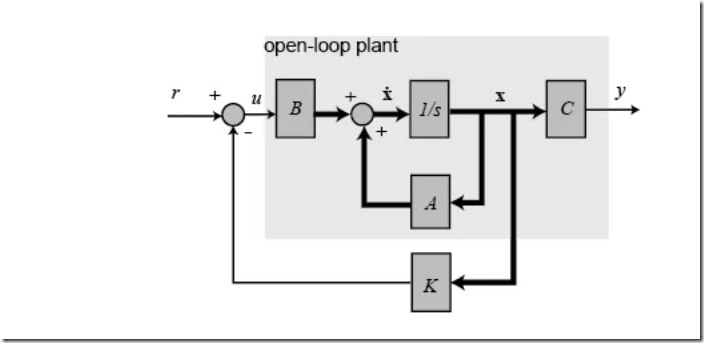
其中K即为通过迭代求解黎卡提方程得到的等效闭环反馈矩阵。
至此,LQR算法求解过程可以总结为:
令P等于最终状态权重矩阵;
迭代黎卡提方程求出新的P;
当两次P的差值足够小时,计算反馈矩阵K;
根据反馈矩阵K获取最优控制量u;
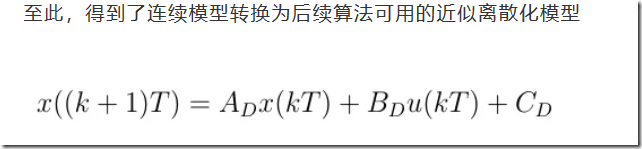
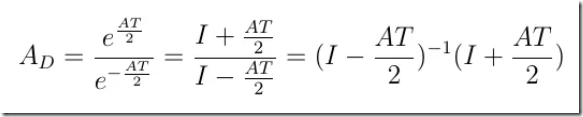
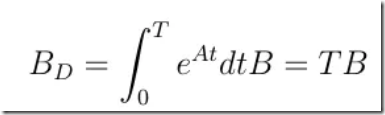
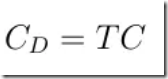
采用《Apollo控制算法之汽车动力学模型》一文中的模型,代入AD、BD、
 到以上算法对应各项,因模型中的CD项为常量,在LQR求解完成后加入即可获得最终所需的系统控制量。
到以上算法对应各项,因模型中的CD项为常量,在LQR求解完成后加入即可获得最终所需的系统控制量。
另外参见:
https://blog.csdn.net/heyijia0327/article/details/39270597
开发者说 | Apollo控制算法之汽车动力学模型和LQR控制的更多相关文章
- BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 client对象模型(CSOM)基础
BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 client对象模型(CSOM)基础 在SP2 ...
- 【Java】JMM内存模型和JVM内存结构
JMM内存模型和JVM内存结构 JAVA内存模型(Java Memory Model) Java内存模型,一般指的是JDK 5 开始使用的新的内存模型,主要由JSR-133: JavaTM Memor ...
- BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 介绍SP2013中远程APIs
BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 介绍SP2013中远程APIs 当SP首次開始 ...
- BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 JavaScript
BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 JavaScript 与托管.NETclien ...
- BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 托管代码(.NET)
BEGINNING SHAREPOINT® 2013 DEVELOPMENT 第9章节--client对象模型和REST APIs概览 托管代码(.NET) 在SP2010中,微软提 ...
- 从零3D基础入门XNA 4.0(2)——模型和BasicEffect
[题外话] 上一篇文章介绍了3D开发基础与XNA开发程序的整体结构,以及使用Model类的Draw方法将模型绘制到屏幕上.本文接着上一篇文章继续,介绍XNA中模型的结构.BasicEffect的使用以 ...
- NOSQL数据模型和CAP原理
NOSQL数据模型和CAP原理 http://blog.sina.com.cn/s/blog_7800d9210100t33v.html 我本来一直觉得NoSQL其实很容易理解的,我本身也已经对NoS ...
- 网络知识学习1---(基础知识:ISO/OSI七层模型和TCP/IP四层模型)
以下的内容和之后的几篇博客只是比较初级的介绍,想要深入学习的话建议自己钻研<TCP/IP详解 卷1:协议> 1.ISO/OSI七层模型 下四层是为数据传输服务的,物理层是真正的传输数 ...
- 黑马-----内存模型和volatile详解
黑马程序员:Java培训.Android培训.iOS培训..Net培训 JAVA线程-内存模型和volatile详解 一.单核内存模型 1.程序运行时,将临时数据存放到Cache中 2.将CPU计算所 ...
随机推荐
- Linux模拟僵尸进程并kill
模拟系统有僵尸进程后怎么解决 僵尸进程 #include <stdio.h> #include <sys/types.h> int main() { //fork a chil ...
- opencv学习之路(16)、膨胀腐蚀应用之走迷宫
一.分析 贴出应用图片以供直观了解 红色部分,因图而异(某些参数,根据图片的不同需要进行相应的修改) 二.代码 #include "opencv2/opencv.hpp" #inc ...
- Centos7.03搭建JDK、Tomcat、MySql环境
本人linux服务器配置是:centos_7_03_64_20G_xdragon_20171025.vhd 公网IP:106.14.14.224 内存:2GB SecureCRT8.0:https:/ ...
- Python3基础 dict setdefault 根据键查找值,找不到键会添加
Python : 3.7.0 OS : Ubuntu 18.04.1 LTS IDE : PyCharm 2018.2.4 Conda ...
- 在fedora23中安装virtualbox, 然后实现虚拟机irtualbox 或者 vmware 下的xp操作系统
参考: http://blog.csdn.net/statdm/article/details/7756788 参考: http://www.cnblogs.com/fengbohello/p/488 ...
- Docker 使用Docker-Compose编排容器
简介: Docker Compose是一个用来定义和运行复杂应用的Docker工具.一个使用Docker容器的应用,通常由多个容器组成.使用Docker Compose不再需要使用shell脚本来启动 ...
- 论文笔记之:Deep Attributes Driven Multi-Camera Person Re-identification
Deep Attributes Driven Multi-Camera Person Re-identification 2017-06-28 21:38:55 [Motivation] 本文 ...
- (转载)C#:Form1_Load()不被执行的三个解决方法
我的第一个c#练习程序,果然又出现问题了...在Form1_Load() not work.估计我的人品又出现问题了. 下面实现的功能很简单,就是声明一个label1然后,把它初始化赋值为hello, ...
- vs项目模板
创建项目模板 Creating a VSIX Deployable Project (or Item) Template with Custom Wizard Support Create a Pro ...
- Kylin web界面 知识点介绍
Big Data Era: 1.More and more data becoming available on Hadoop2.Limitations in existing Business ...