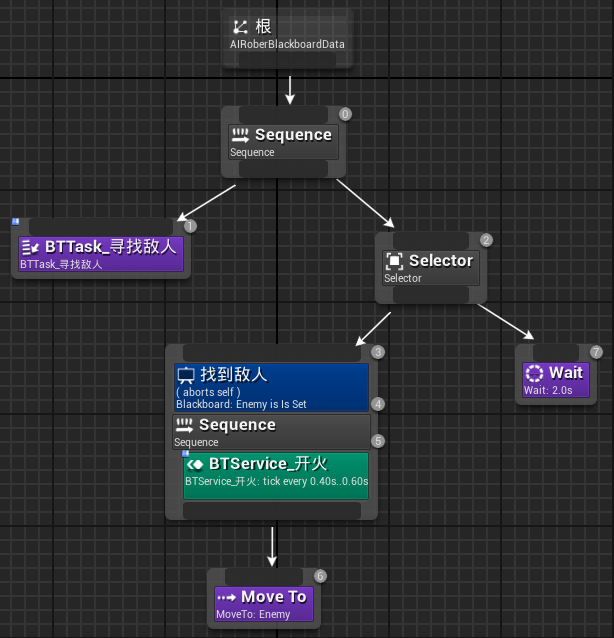
[UE4]机器人射击逻辑行为树
1、寻找敌人
2、如果没有找到,等待2秒,跳转到1
3、如果找到了,走向敌人
4、走向敌人的过程中,如果看见敌人了,则射击
5、如果敌人没有了,则跳转到1
[UE4]机器人射击逻辑行为树的更多相关文章
- UE4中的AI行为树简单介绍
UE4引擎中可以实现简单AI的方式有很多,行为树是其中比较常用也很实用的AI控制方式,在官网的学习文档中也有最简单的目标跟踪AI操作教程,笔者在这里只作简单介绍. AIController->和 ...
- [Bzoj3205][Apio2013]机器人(斯坦纳树)(bfs)
3205: [Apio2013]机器人 Time Limit: 15 Sec Memory Limit: 128 MBSubmit: 977 Solved: 230[Submit][Status] ...
- [UE4]机器人自动寻路
要让机器人能够自动寻路,需要画出自动寻路的范围,可以使用“Nav Mesh Bounds Volume”组件来自定寻路范围 通过“Delay”节点可以实现让AI执行Move To以后停顿1秒,然后继 ...
- [UE4]修改射击方向
- [UE4]添加射击的准心
其实就是创建一个UI Widget,在UI Widget中添加一个准心图片(png)格式,准心图片设置为屏幕居中对齐,然后在自定义的GameMode中把这个UI Widget添加到视图中.
- UE4简单AI
首先做个小小的声明把,由于俺之前也没接触过AI ,所以有一些专业的词汇可能翻译存在各种问题,如果你发现的话,还是希望能够提出来哦,我们一起进步. 记住配合视频食用更佳哦~ 视频连接:http://ww ...
- 移植UE4的Spline与SplineMesh组件到Unity5
一个月前,想开始看下UE4的源码,刚开始以为有Ogre1.9与Ogre2.1源码的基础 ,应该还容易理解,把源码下起后,发现我还是想的太简单了,UE4的代码量对比Ogre应该多了一个量级,毕竟Ogre ...
- 【网络流24题】No.8 机器人路径规划问题
[题意] 机器人 Rob 可在一个树状路径上自由移动. 给定树状路径 T 上的起点 s 和终点 t, 机器人 Rob 要从 s 运动到 t. 树状路径 T 上有若干可移动的障碍物. 由于路径狭窄, 任 ...
- 【自然语言处理篇】--Chatterbot聊天机器人
一.前述 ChatterBot是一个基于机器学习的聊天机器人引擎,构建在python上,主要特点是可以自可以从已有的对话中进行学(jiyi)习(pipei). 二.具体 1.安装 是的,安装超级简单, ...
随机推荐
- 直面Java 第002期
. Java和C++同为面向对象语言,Java和C++主要区别有哪些?双方个有哪些优缺点? 解: C++ 被设计成主要用在系统性应用程序设计上的语言,对C语言进行了扩展.对于C语言这个为运行效率设计的 ...
- Spring定时器corn表达式详解
1.结构 Spring定时器corn表达式详解 2.各字段的含义 字段 允许值 允许的特殊字符 秒 0~59 - * / 分 0~59 - * / 小时 0~23 - * / 日期 1~31 - * ...
- Laya播放unity特效
杭州-fun 2017/12/5 20:47:12 其实网上就有你搜下就有了现成的脚本,设置帧数和截取时间它会截屏并保存成贴图导入laya生成atlas就能用了 就是unity的截屏功能 就 ...
- 深入探讨JavaScript如何实现深度复制(deep clone)
在代码复用模式里面有一种叫做“复制属性模式”(copying properties pattern).谈到代码复用的时候,很有可能想到的是代码的继承性(inheritance),但重要的是要记住其最终 ...
- 短小而精悍的JsvaScript函数
1. 回到顶部, 使用浏览器的刷新频率 requestAnimationFrame 来实现的 const scrollToTop = () => { const c = document.doc ...
- react-router 从 v3 版本升到 v4 版本,升级小记
react-router v4 跟 react 一样拆成了两部分,核心的 react-router 和依运行环境而定的 react-router-dom 或 react-router-native(跟 ...
- MatConvNet中关于vl_simplenn_display的一些分析
一.关于各层data size的分析 layer1: floor((224-7)/2)+1=109 这里7是filter大小,2是stride layer4: floor((109+0+1-3)/2 ...
- Linux 建立 TCP 连接的超时时间分析(解惑)
Linux 系统默认的建立 TCP 连接的超时时间为 127 秒,对于许多客户端来说,这个时间都太长了, 特别是当这个客户端实际上是一个服务的时候,更希望能够尽早失败,以便能够选择其它的可用服务重新尝 ...
- c# 一些细节
1.动态对象和匿名对象偶然看到一个语法,觉得特别方便然后频繁使用,但是没有深究,直到今天忽然发现我潜意思中对它的认知居然是错误的. var data=new { State=1,Message=&qu ...
- 基于STM32的红外遥控重点解析
本文有两个内容:一.红外遥控协议的的讲解:二.解码程序解析(参考正点原子的代码) 红外的介绍.优点.缺点就不给大家说了,进入正题 一.红外遥控协议的的讲解 红外遥控的编码目前广泛使用的是:NEC Pr ...