[转]A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications.
原文地址http://www.starlino.com/imu_guide.html
Introduction
There’s now a FRENCH translation of this article in PDF. Thanks to Daniel Le Guern!
This guide is intended to everyone interested in inertial MEMS (Micro-Electro-Mechanical Systems) sensors, in particular Accelerometers and Gyroscopes as well as combination IMU devices (Inertial Measurement Unit).
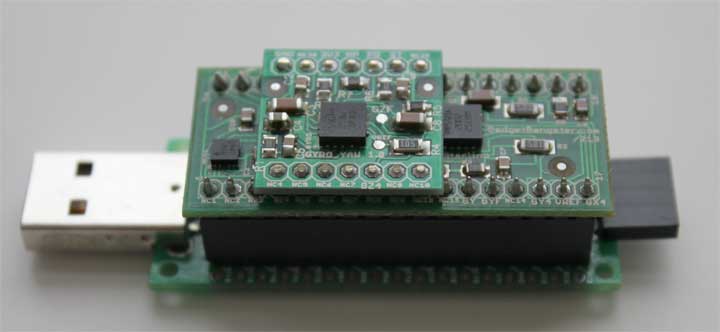
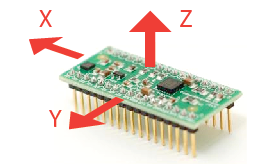
Example IMU unit: Acc_Gyro_6DOF on top of MCU processing unit UsbThumb providing USB/Serial connectivity
I'll try try to cover few basic but important topics in this article:
– what does an accelerometer measure
– what does a gyroscope (aka gyro) measure
– how to convert analog-to-digital (ADC) readings that you get from
these sensor to physical units (those would be g for accelerometer,
deg/s for gyroscope)
– how to combine accelerometer and gyroscope readings in order to
obtain accurate information about the inclination of your device
relative to the ground plane
Throughout the article I will try to keep
the math to the minimum. If you know what Sine/Cosine/Tangent are then
you should be able to understand and use these ideas in your project no
matter what platform you're using Arduino, Propeller, Basic Stamp, Atmel
chips, Microchip PIC, etc. There are people out there who believe that
you need complex math in order to make use of an IMU unit (complex FIR
or IIR filters such as Kalman filters, Parks-McClellan filters, etc).
You can research all those and achieve wonderful but complex results. My
way of explaining things require just basic math. I am a great believer
in simplicity. I think a system that is simple is easier to control and
monitor, besides many embedded devices do not have the power and
resources to implement complex algorithms requiring matrix calculations.
I'll use as an example a new IMU unit that I designed – the Acc_Gyro Accelerometer + Gyro IMU.
We'll use parameters of this device in our examples below. This unit is
a good device to start with because it consists of 3 devices:
– LIS331AL (datasheet) – analog 3-axis 2G accelerometer
– LPR550AL (datasheet) – a dual-axis (Pitch and Roll), 500deg/second gyroscope
– LY550ALH (datasheet) – a single axis (Yaw) gyroscope (this last device is not used in this tutorial but it becomes relevant when you move on to DCM Matrix implementation)
Together they represent a 6-Degrees of Freedom Inertial Measurement
Unit. Now that's a fancy name! Nevertheless, behind the fancy name is a
very useful combination device that we'll cover and explain in detail
below.
Part 1. Accelerometer
To understand this unit we'll start with the accelerometer. When
thinking about accelerometers it is often useful to image a box in shape
of a cube with a ball inside it. You may imagine something else like a
cookie or a donut , but I'll imagine a ball:
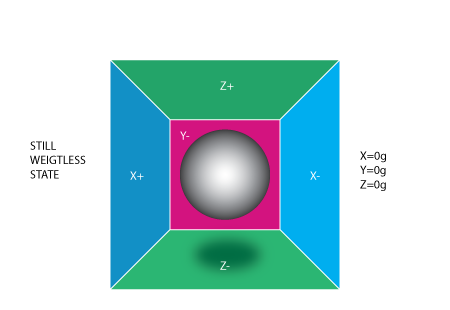
If we take this box in a place with no gravitation fields or for that
matter with no other fields that might affect the ball's position – the
ball will simply float in the middle of the box. You can imagine the
box is in outer-space far-far away from any cosmic bodies, or if such a
place is hard to find imagine at least a space craft orbiting around the
planet where everything is in weightless state . From the picture above
you can see that we assign to each axis a pair of walls (we removed the
wall Y+ so we can look inside the box). Imagine that each wall is
pressure sensitive. If we move suddenly the box to the left (we
accelerate it with acceleration 1g = 9.8m/s^2), the ball will hit the
wall X-. We then measure the pressure force that the ball applies to the
wall and output a value of -1g on the X axis.
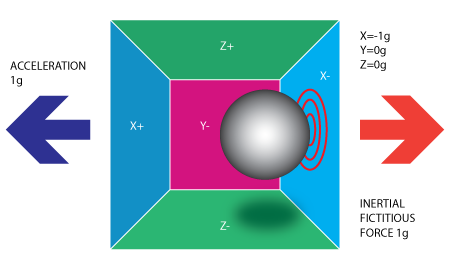
Please note that the accelerometer will actually detect a force that
is directed in the opposite direction from the acceleration vector. This
force is often called Inertial Force or Fictitious Force.
One thing you should learn from this is that an accelerometer measures
acceleration indirectly through a force that is applied to one of it's
walls (according to our model, it might be a spring or something else in
real life accelerometers). This force can be caused by the acceleration
, but as we'll see in the next example it is not always caused by
acceleration.
If we take our model and put it on Earth the ball will fall on the Z-
wall and will apply a force of 1g on the bottom wall, as shown in the
picture below:
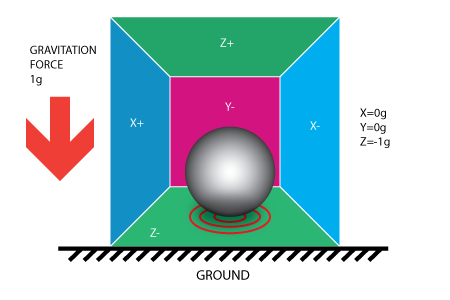
In this case the box isn't moving but we still get a reading of -1g
on the Z axis. The pressure that the ball has applied on the wall was
caused by a gravitation force. In theory it could be a different type of
force – for example, if you imagine that our ball is metallic, placing a
magnet next to the box could move the ball so it hits another wall.
This was said just to prove that in essence accelerometer measures force
not acceleration. It just happens that acceleration causes an inertial
force that is captured by the force detection mechanism of the
accelerometer.
While this model is not exactly how a MEMS sensor is constructed it
is often useful in solving accelerometer related problems. There are
actually similar sensors that have metallic balls inside, they are
called tilt switches, however they are more primitive and usually they
can only tell if the device is inclined within some range or not, not
the extent of inclination.
So far we have analyzed the accelerometer output on a single axis and
this is all you'll get with a single axis accelerometers. The real
value of triaxial accelerometers comes from the fact that they can
detect inertial forces on all three axes. Let's go back to our box
model, and let's rotate the box 45 degrees to the right. The ball will
touch 2 walls now: Z- and X- as shown in the picture below:
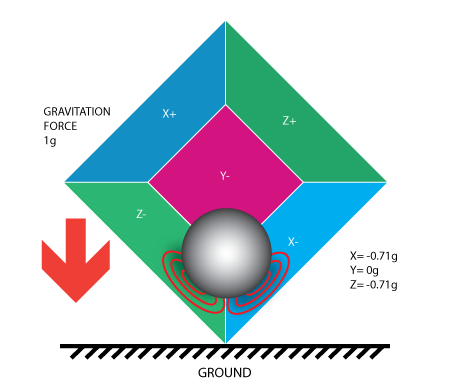
The values of 0.71 are not arbitrary, they are actually an
approximation for SQRT(1/2). This will become more clear as we introduce
our next model for the accelerometer.
In the previous model we have fixed the gravitation force and rotated
our imaginary box. In last 2 examples we have analyzed the output in 2
different box positions, while the force vector remained constant. While
this was useful in understanding how the accelerometer interacts with
outside forces, it is more practical to perform calculations if we fix
the coordinate system to the axes of the accelerometer and imagine that
the force vector rotates around us.
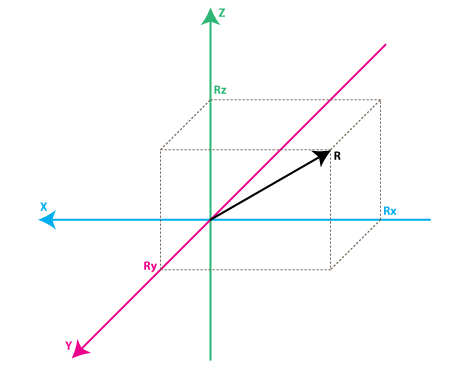
Please have a look at the model above, I preserved the colors of the
axes so you can make a mental transition from the previous model to the
new one. Just imagine that each axis in the new model is perpendicular
to the respective faces of the box in the previous model. The vector R
is the force vector that the accelerometer is measuring (it could be
either the gravitation force or the inertial force from the examples
above or a combination of both). Rx, Ry, Rz are projection of the R
vector on the X,Y,Z axes. Please notice the following relation:
R^2 = Rx^2 + Ry^2 + Rz^2 (Eq. 1)
which is basically the equivalent of the Pythagorean theorem in 3D.
Remember that a little bit earlier I told you that the values of
SQRT(1/2) ~ 0.71 are not random. If you plug them in the formula above,
after recalling that our gravitation force was 1 g we can verify that:
1^2 = (-SQRT(1/2) )^2 + 0 ^2 + (-SQRT(1/2))^2
simply by substituting R=1, Rx = -SQRT(1/2), Ry = 0 , Rz = -SQRT(1/2) in Eq.1
After a long preamble of theory we're getting closer to real life
accelerometers. The values Rx, Ry, Rz are actually linearly related to
the values that your real-life accelerometer will output and that you
can use for performing various calculations.
Before we get there let's talk a little about the way accelerometers
will deliver this information to us. Most accelerometers will fall in
two categories: digital and analog. Digital accelerometers will give you
information using a serial protocol like I2C , SPI or USART, while
analog accelerometers will output a voltage level within a predefined
range that you have to convert to a digital value using an ADC (analog
to digital converter) module. I will not go into much detail about how
ADC works, partly because it is such an extensive topic and partly
because it is different from one platform to another. Some
microcontroller will have a built-in ADC modules some of them will need
external components in order to perform the ADC conversions. No matter
what type of ADC module you use you'll end up with a value in a certain
range. For example a 10-bit ADC module will output a value in the range
of 0..1023, note that 1023 = 2^10 -1. A 12-bit ADC module will output a
value in the range of 0..4095, note that 4095 = 2^12-1.
Let's move on by considering a simple example, suppose our 10bit ADC
module gave us the following values for the three accelerometer channels
(axes):
AdcRx = 586
AdcRy = 630
AdcRz = 561
Each ADC module will have a reference voltage, let's assume in our
example it is 3.3V. To convert a 10bit adc value to voltage we use the
following formula:
VoltsRx = AdcRx * Vref / 1023
A quick note here: that for 8bit ADC the last divider would be 255 = 2
^ 8 -1 , and for 12bit ADC last divider would be 4095 = 2^12 -1.
Applying this formula to all 3 channels we get:
VoltsRx = 586 * 3.3V / 1023 =~ 1.89V (we round all results to 2 decimal points)
VoltsRy = 630 * 3.3V / 1023 =~ 2.03V
VoltsRz = 561 * 3.3V / 1023 =~ 1.81V
Each accelerometer has a zero-g voltage level, you can find it in
specs, this is the voltage that corresponds to 0g. To get a signed
voltage value we need to calculate the shift from this level. Let's say
our 0g voltage level is VzeroG = 1.65V. We calculate the voltage shifts
from zero-g voltage as follows::
DeltaVoltsRx = 1.89V – 1.65V = 0.24V
DeltaVoltsRy = 2.03V – 1.65V = 0.38V
DeltaVoltsRz = 1.81V – 1.65V = 0.16V
We now have our accelerometer readings in Volts , it's still not in g
(9.8 m/s^2), to do the final conversion we apply the accelerometer
sensitivity, usually expressed in mV/g. Lets say our Sensitivity =
478.5mV/g = 0.4785V/g. Sensitivity values can be found in accelerometer
specifications. To get the final force values expressed in g we use the
following formula:
Rx = DeltaVoltsRx / Sensitivity
Rx = 0.24V / 0.4785V/g =~ 0.5g
Ry = 0.38V / 0.4785V/g =~ 0.79g
Rz = 0.16V / 0.4785V/g =~ 0.33g
We could of course combine all steps in one formula, but I went
through all the steps to make it clear how you go from ADC readings to a
force vector component expressed in g.
Rx = (AdcRx * Vref / 1023 – VzeroG) / Sensitivity (Eq.2)
Ry = (AdcRy * Vref / 1023 – VzeroG) / Sensitivity
Rz = (AdcRz * Vref / 1023 – VzeroG) / Sensitivity
We now have all 3 components that define our inertial force vector,
if the device is not subject to other forces other than gravitation, we
can assume this is the direction of our gravitation force vector. If you
want to calculate inclination of device relative to the ground you can
calculate the angle between this vector and Z axis. If you are also
interested in per-axis direction of inclination you can split this
result into 2 components: inclination on the X and Y axis that can be
calculated as the angle between gravitation vector and X / Y axes.
Calculating these angles is more simple than you might think, now that
we have calculated the values for Rx,Ry and Rz. Let's go back to our
last accelerometer model and do some additional notations:
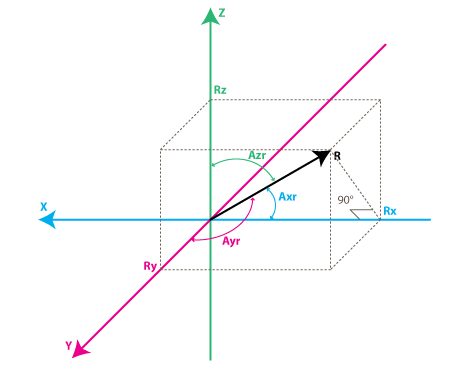
The angles that we are interested in are the angles between X,Y,Z
axes and the force vector R. We'll define these angles as Axr, Ayr, Azr.
You can notice from the right-angle triangle formed by R and Rx that:
cos(Axr) = Rx / R , and similarly :
cos(Ayr) = Ry / R
cos(Azr) = Rz / R
We can deduct from Eq.1 that R = SQRT( Rx^2 + Ry^2 + Rz^2).
We can find now our angles by using arccos() function (the inverse cos() function ):
Axr = arccos(Rx/R)
Ayr = arccos(Ry/R)
Azr = arccos(Rz/R)
We've gone a long way to explain the accelerometer model, just to
come up to these formulas. Depending on your applications you might want
to use any intermediate formulas that we have derived. We'll also
introduce the gyroscope model soon, and we'll see how accelerometer and
gyroscope data can be combined to provide even more accurate inclination
estimations.
But before we do that let's do some more useful notations:
cosX = cos(Axr) = Rx / R
cosY = cos(Ayr) = Ry / R
cosZ = cos(Azr) = Rz / R
This triplet is often called Direction Cosine
, and it basically represents the unit vector (vector with length 1)
that has same direction as our R vector. You can easily verify that:
SQRT(cosX^2 + cosY^2 + cosZ^2) = 1
This is a nice property since it absolve us from monitoring the
modulus(length) of R vector. Often times if we're just interested in
direction of our inertial vector, it makes sense to normalize it's
modulus in order to simplify other calculations.
Part 2. Gyroscope
We're not going to introduce any equivalent box model for the
gyroscope like we did for accelerometer, instead we're going to jump
straight to the second accelerometer model and we'll show what does the
gyroscope measure according to this model.
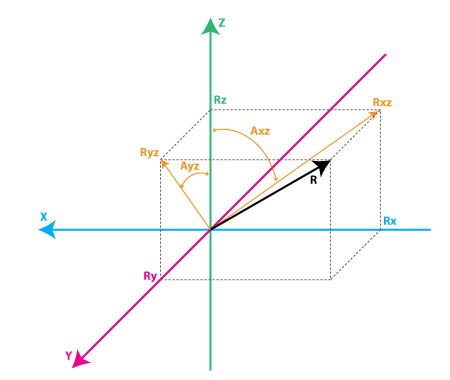
Each gyroscope channel measures the rotation around one of the axes.
For instance a 2-axes gyroscope will measure the rotation around (or
some may say "about") the X and Y axes. To express this rotation in
numbers let's do some notations. First let's define:
Rxz – is the projection of the inertial force vector R on the XZ plane
Ryz – is the projection of the inertial force vector R on the YZ plane
From the right-angle triangle formed by Rxz and Rz, using Pythagorean theorem we get:
Rxz^2 = Rx^2 + Rz^2 , and similarly:
Ryz^2 = Ry^2 + Rz^2
also note that:
R^2 = Rxz^2 + Ry^2 , this can be derived from Eq.1 and above equations, or it can be derived from right-angle triangle formed by R and Ryz
R^2 = Ryz^2 + Rx^2
We're not going to use these formulas in this article but it is useful to note the relation between all the values in our model.
Instead we're going to define the angle between the Z axis and Rxz, Ryz vectors as follows:
Axz – is the angle between the Rxz (projection of R on XZ plane) and Z axis
Ayz – is the angle between the Ryz (projection of R on YZ plane) and Z axis
Now we're getting closer to what the gyroscope measures. Gyroscope
measures the rate of changes of the angles defined above. In other words
it will output a value that is linearly related to the rate of change
of these angles. To explain this let's assume that we have measured the
rotation angle around axis Y (that would be Axz angle) at time t0, and
we define it as Axz0, next we measured this angle at a later time t1 and
it was Axz1. The rate of change will be calculated as follows:
RateAxz = (Axz1 – Axz0) / (t1 – t0).
If we express Axz in degrees, and time in seconds , then this value
will be expressed in deg/s . This is what a gyroscope measures.
In practice a gyroscope(unless it is a special digital gyroscope)
will rarely give you a value expressed in deg/s. Same as for
accelerometer you'll get an ADC value that you'll need to convert to
deg/s using a formula similar to Eq. 2 that we have
defined for accelerometer. Let's introduce the ADC to deg/s conversion
formula for gyroscope (we assume we're using a 10bit ADC module , for
8bit ADC replace 1023 with 255, for 12bit ADC replace 1023 with 4095).
RateAxz = (AdcGyroXZ * Vref / 1023 – VzeroRate) / Sensitivity Eq.3
RateAyz = (AdcGyroYZ * Vref / 1023 – VzeroRate) / Sensitivity
AdcGyroXZ, AdcGyroYZ – are obtained from our adc module and they
represent the channels that measure the rotation of projection of R
vector in XZ respectively in YZ planes, which is the equivalent to
saying rotation was done around Y and X axes respectively.
Vref – is the ADC reference voltage we'll use 3.3V in the example below
VzeroRate – is the zero-rate voltage, in other words the voltage
that the gyroscope outputs when it is not subject to any rotation, for
the Acc_Gyro
board it is for example 1.23V (you can find this values in the specs –
but don't trust the specs most gyros will suffer slight offset after
being soldered so measure VzeroRate for each axis output using a
voltmeter, usually this value will not change over time once the gyro
was soldered, if it variates – write a calibration routine to measure it
before device start-up, user must be instructed to keep device in still
position upon start-up for gyros to calibrate).
Sensitivity – is the sensitivity of your gyroscope it is expressed
in mV / (deg / s) often written as mV/deg/s , it basically tells you how
many mV will the gyroscope output increase , if you increase the
rotation speed by one deg/s. The sensitivity of Acc_Gyro board is for example 2mV/deg/s or 0.002V/deg/s
Let's take an example, suppose our ADC module returned following values:
AdcGyroXZ = 571
AdcGyroXZ = 323
Using the above formula, and using the specs parameters of Acc_Gyro board we'll get:
RateAxz = (571 * 3.3V / 1023 – 1.23V) / ( 0.002V/deg/s) =~ 306 deg/s
RateAyz = (323 * 3.3V / 1023 – 1.23V) / ( 0.002V/deg/s) =~ -94 deg/s
In other words the device rotates around the Y axis (or we can say it
rotates in XZ plane) with a speed of 306 deg/s and around the X axis
(or we can say it rotates in YZ plane) with a speed of -94 deg/s. Please
note that the negative sign means that the device rotates in the
opposite direction from the conventional positive direction. By
convention one direction of rotation is positive. A good gyroscope
specification sheet will show you which direction is positive, otherwise
you'll have to find it by experimenting with the device and noting
which direction of rotation results in increasing voltage on the output
pin. This is best done using an oscilloscope since as soon as you stop
the rotation the voltage will drop back to the zero-rate level. If
you're using a multimeter you'd have to maintain a constant rotation
rate for at least few seconds and note the voltage during this rotation,
then compare it with the zero-rate voltage. If it is greater than the
zero-rate voltage it means that direction of rotation is positive.
Part 3. Putting it all together. Combining accelerometer and gyroscope data.
If you're reading this article you probably acquired or are planning
to acquire a IMU device, or probably you're planning to build one from
separate accelerometer and gyroscope devices.
NOTE: FOR PRACTICAL IMPLEMENTATION AND TESTING OF THIS ALGORITHM PLEASE READ THIS ARTICLE:
http://starlino.com/imu_kalman_arduino.html
The first step in using a combination IMU device that combines an
accelerometer and a gyroscope is to align their coordinate systems. The
easiest way to do it is to choose the coordinate system of accelerometer
as your reference coordinate system. Most accelerometer data sheets
will display the direction of X,Y,Z axes relative to the image of the
physical chip or device. For example here are the directions of X,Y,Z
axes as shown in specifications for the Acc_Gyro board:
Next steps are:
– identify the gyroscope outputs that correspond to RateAxz , RateAyz values discussed above.
– determine if these outputs need to be inverted due to physical position of gyroscope relative to the accelerometer
Do not assume that if a gyroscope has an output marked X or Y, it
will correspond to any axis in the accelerometer coordinate system, even
if this output is part of an IMU unit. The best way is to test it.
Here is a sample sequence to determine which output of gyroscope corresponds to RateAxz value discussed above.
– start from placing the device in horizontal position. Both X and Y
outputs of accelerometer would output the zero-g voltage (for example
for Acc_Gyro board this is 1.65V)
– next start rotating the device around the Y axis, another way to say
it is that you rotate the device in XZ plane, so that X and Z
accelerometer outputs change and Y output remains constant.
– while rotating the device at a constant speed note which gyroscope
output changes, the other gyroscope outputs should remain constant
– the gyroscope output that changed during the rotation around Y axis
(rotation in XZ plane) will provide the input value for AdcGyroXZ, from
which we calculate RateAxz
– the final step is to ensure the rotation direction corresponds to our
model, in some cases you may have to invert the RateAxz value due to
physical position of gyroscope relative to the accelerometer
– perform again the above test, rotating the device around the Y axis,
this time monitor the X output of accelerometer (AdcRx in our model). If
AdcRx grows (the first 90 degrees of rotation from horizontal
position), then AdcGyroXZ should decrease. This is due to the fact that
we are monitoring the gravitation vector and when device rotates in one
direction the vector will rotate in oposite direction (relative to the
device coordonate system, which we are using). So, otherwise you need to
invert RateAxz , you can achieve this by introducing a sign factor in Eq.3, as follows:
RateAxz = InvertAxz * (AdcGyroXZ * Vref / 1023 – VzeroRate) / Sensitivity , where InvertAxz is 1 or -1
same test can be done for RateAyz , by rotating the device around the
X axis, and you can identify which gyroscope output corresponds to
RateAyz, and if it needs to be inverted. Once you have the value for
InvertAyz, you should use the following formula to calculate RateAyz:
RateAyz = InvertAyz * (AdcGyroYZ * Vref / 1023 – VzeroRate) / Sensitivity
If you would do these tests on Acc_Gyro board you would get following results:
– the output pin for RateAxz is GX4 and InvertAxz = 1
– the output pin for RateAyz is GY4 and InvertAyz = 1
From this point on we'll consider that you have setup your IMU in
such a way that you can calculate correct values for Axr, Ayr, Azr (as
defined Part 1. Accelerometer) and RateAxz, RateAyz (as defined in Part
2. Gyroscope). Next we'll analyze the relations between these values
that turn out useful in obtaining more accurate estimation of the
inclination of the device relative to the ground plane.
You might be asking yourself by this point, if accelerometer model
already gave us inclination angles of Axr,Ayr,Azr why would we want to
bother with the gyroscope data ? The answer is simple: accelerometer
data can't always be trusted 100%. There are several reason, remember
that accelerometer measures inertial force, such a force can be caused
by gravitation (and ideally only by gravitation), but it might also be
caused by acceleration (movement) of the device. As a result even if
accelerometer is in a relatively stable state, it is still very
sensitive to vibration and mechanical noise in general. This is the main
reason why most IMU systems use a gyroscope to smooth out any
accelerometer errors. But how is this done ? And is the gyroscope free
from noise ?
The gyroscope is not free from noise however because it measures
rotation it is less sensitive to linear mechanical movements, the type
of noise that accelerometer suffers from, however gyroscopes have other
types of problems like for example drift (not coming back to zero-rate
value when rotation stops). Nevertheless by averaging data that comes
from accelerometer and gyroscope we can obtain a relatively better
estimate of current device inclination than we would obtain by using the
accelerometer data alone.
In the next steps I will introduce an algorithm that was inspired by
some ideas used in Kalman filter, however it is by far more simple and
easier to implement on embedded devices. Before that let's see first
what we want our algorithm to calculate. Well , it is the direction of
gravitation force vector R = [Rx,Ry,Rz] from which we can derive other
values like Axr,Ayr,Azr or cosX,cosY,cosZ that will give us an idea
about the inclination of our device relative to the ground plane, we
discuss the relation between these values in Part 1. One might say –
don't we already have these values Rx, Ry , Rz from Eq.2
in Part 1 ? Well yes, but remember that these values are derived from
accelerometer data only, so if you would be to use them directly in your
application you might get more noise than your application can
tolerate. To avoid further confusion let's re-define the accelerometer
measurements as follows:
Racc – is the inertial force vector as measured by accelerometer,
that consists of following components (projections on X,Y,Z axes):
RxAcc = (AdcRx * Vref / 1023 – VzeroG) / Sensitivity
RyAcc = (AdcRy * Vref / 1023 – VzeroG) / Sensitivity
RzAcc = (AdcRz * Vref / 1023 – VzeroG) / Sensitivity
So far we have a set of measured values that we can obtain purely
from accelerometer ADC values. We'll call this set of data a "vector"
and we'll use the following notation.
Racc = [RxAcc,RyAcc,RzAcc]
Because these components of Racc can be obtained from accelerometer data , we can consider it an input to our algorithm.
Please note that because Racc measures the gravitation force you'll
be correct if you assume that the length of this vector defined as
follows is equal or close to 1g.
|Racc| = SQRT(RxAcc^2 +RyAcc^2 + RzAcc^2),
However to be sure it makes sense to update this vector as follows:
Racc(normalized) = [RxAcc/|Racc| , RyAcc/|Racc| , RzAcc/|Racc|].
This will ensure the length of your normalized Racc vector is always 1.
Next we'll introduce a new vector and we'll call it
Rest = [RxEst,RyEst,RzEst]
This will be the output of our algorithm , these are corrected values based on gyroscope data and based on past estimated data.
Here is what our algorithm will do:
– accelerometer tells us: "You are now at position Racc"
– we say "Thank you, but let me check",
– then correct this information with gyroscope data as well as with past Rest data and we output a new estimated vector Rest.
– we consider Rest to be our "best bet" as to the current position of the device.
Let's see how we can make it work.
We'll start our sequence by trusting our accelerometer and assigning:
Rest(0) = Racc(0)
By the way remember Rest and Racc are vectors , so the above equation
is just a simple way to write 3 sets of equations, and avoid
repetition:
RxEst(0) = RxAcc(0)
RyEst(0) = RyAcc(0)
RzEst(0) = RzAcc(0)
Next we'll do regular measurements at equal time intervals of T
seconds, and we'll obtain new measurements that we'll define as Racc(1),
Racc(2) , Racc(3) and so on. We'll also issue new estimates at each
time intervals Rest(1), Rest(2), Rest(3) and so on.
Suppose we're at step n. We have two known sets of values that we'd like to use:
Rest(n-1) – our previous estimate, with Rest(0) = Racc(0)
Racc(n) – our current accelerometer measurement
Before we can calculate Rest(n) , let's introduce a new measured
value, that we can obtain from our gyroscope and a previous estimate.
We'll call it Rgyro , and it is also a vector consisting of 3 components:
Rgyro = [RxGyro,RyGyro,RzGyro]
We'll calculate this vector one component at a time. We'll start with RxGyro.
Let's start by observing the following relation in our gyroscope
model, from the right-angle triangle formed by Rz and Rxz we can derive
that:
tan(Axz) = Rx/Rz => Axz = atan2(Rx,Rz)
Atan2 might be a function you never used before, it is similar to
atan, except it returns values in range of (-PI,PI) as opposed to
(-PI/2,PI/2) as returned by atan, and it takes 2 arguments instead of
one. It allows us to convert the two values of Rx,Rz to angles in the
full range of 360 degrees (-PI to PI). You can read more about atan2 here.
So knowing RxEst(n-1) , and RzEst(n-1) we can find:
Axz(n-1) = atan2( RxEst(n-1) , RzEst(n-1) ).
Remember that gyroscope measures the rate of change of the Axz angle. So we can estimate the new angle Axz(n) as follows:
Axz(n) = Axz(n-1) + RateAxz(n) * T
Remember that RateAxz can be obtained from our gyroscope ADC
readings. A more precise formula can use an average rotation rate
calculated as follows:
RateAxzAvg = ( RateAxz(n) + RateAxz(n-1) ) / 2
Axz(n) = Axz(n-1) + RateAxzAvg * T
The same way we can find:
Ayz(n) = Ayz(n-1) + RateAyz(n) * T
Ok so now we have Axz(n) and Ayz(n). Where do we go from here to deduct RxGyro/RyGyro ? From Eq. 1 we can write the length of vector Rgyro as follows:
|Rgyro| = SQRT(RxGyro^2 + RyGyro^2 + RzGyro^2)
Also because we normalized our Racc vector, we may assume that it's
length is 1 and it hasn't changed after the rotation, so it is
relatively safe to write:
|Rgyro| = 1
Let's adopt a temporary shorter notation for the calculations below:
x =RxGyro , y=RyGyro, z=RzGyro
Using the relations above we can write:
x = x / 1 = x / SQRT(x^2+y^2+z^2)
Let's divide numerator and denominator of fraction by SQRT(x^2 + z^2)
x = ( x / SQRT(x^2 + z^2) ) / SQRT( (x^2 + y^2 + z^2) / (x^2 + z^2) )
Note that x / SQRT(x^2 + z^2) = sin(Axz), so:
x = sin(Axz) / SQRT (1 + y^2 / (x^2 + z^2) )
Now multiply numerator and denominator of fraction inside SQRT by z^2
x = sin(Axz) / SQRT (1 + y^2 * z ^2 / (z^2 * (x^2 + z^2)) )
Note that z / SQRT(x^2 + z^2) = cos(Axz) and y / z = tan(Ayz), so finally:
x = sin(Axz) / SQRT (1 + cos(Axz)^2 * tan(Ayz)^2 )
Going back to our notation we get:
RxGyro = sin(Axz(n)) / SQRT (1 + cos(Axz(n))^2 * tan(Ayz(n))^2 )
same way we find that
RyGyro = sin(Ayz(n)) / SQRT (1 + cos(Ayz(n))^2 * tan(Axz(n))^2 )
Side Note: it is possible to further simplify this formula. By dividing both parts of the fraction by sin(Axz(n)) you get:
RxGyro = 1 / SQRT (1/ sin(Axz(n))^2 + cos(Axz(n))^2 / sin(Axz(n))^2 * tan(Ayz(n))^2 )
RxGyro = 1 / SQRT (1/ sin(Axz(n))^2 + cot(Axz(n))^2 * sin(Ayz(n))^2 / cos(Ayz(n))^2 )
now add and substract cos(Axz(n))^2/sin(Axz(n))^2 = cot(Axz(n))^2
RxGyro = 1 / SQRT (1/ sin(Axz(n))^2 – cos(Axz(n))^2/sin(Axz(n))^2 + cot(Axz(n))^2 * sin(Ayz(n))^2 / cos(Ayz(n))^2 + cot(Axz(n))^2 )
and by grouping terms 1&2 and then 3&4 we get
RxGyro = 1 / SQRT (1 + cot(Axz(n))^2 * sec(Ayz(n))^2 ), where cot(x) = 1 / tan(x) and sec(x) = 1 / cos(x)
This formula uses only 2 trigonometric functions and can be
computationally less expensive. If you have Mathematica program you can
verify it
by evaluating FullSimplify [Sin[A]^2/ ( 1 + Cos[A]^2 * Tan[B]^2)]
Now, finally we can find:
RzGyro = Sign(RzGyro)*SQRT(1 – RxGyro^2 – RyGyro^2).
Where Sign(RzGyro) = 1 when RzGyro>=0 , and Sign(RzGyro) = -1 when RzGyro<0.
One simple way to estimate this is to take:
Sign(RzGyro) = Sign(RzEst(n-1))
In practice be careful when RzEst(n-1) is close to 0. You may
skip the gyro phase altogether in this case and assign: Rgyro =
Rest(n-1). Rz is used as a reference for calculating Axz and Ayz angles
and when it's close to 0, values may overflow and trigger bad results.
You'll be in domain of large floating point numbers where tan() / atan()
function implementations may lack precision.
So let's recap what we have so far, we are at step n of our algorithm and we have calculated the following values:
Racc – current readings from our accelerometer
Rgyro – obtained from Rest(n-1) and current gyroscope readings
Which values do we use to calculate the updated estimate Rest(n) ?
You probably guessed that we'll use both. We'll use a weighted average,
so that:
Rest(n) = (Racc * w1 + Rgyro * w2 ) / (w1 + w2)
We can simplify this formula by dividing both numerator and denominator of the fraction by w1.
Rest(n) = (Racc * w1/w1 + Rgyro * w2/w1 ) / (w1/w1 + w2/w1)
and after substituting w2/w1 = wGyro we get:
Rest(n) = (Racc + Rgyro * wGyro ) / (1 + wGyro)
In the above formula wGyro tells us how much we trust our gyro
compared to our accelerometer. This value can be chosen experimentally
usually values between 5..20 will trigger good results.
The main difference of this algorithm from Kalman filter is that this
weight is relatively fixed , whereas in Kalman filter the weights are
permanently updated based on the measured noise of the accelerometer
readings. Kalman filter is focused at giving you "the best" theoretical
results, whereas this algorithm can give you results "good enough" for
your practical application. You can implement an algorithm that adjusts
wGyro depending on some noise factors that you measure, but fixed values
will work well for most applications.
We are one step away from getting our updated estimated values:
RxEst(n) = (RxAcc + RxGyro * wGyro ) / (1 + wGyro)
RyEst(n) = (RyAcc + RyGyro * wGyro ) / (1 + wGyro)
RzEst(n) = (RzAcc + RzGyro * wGyro ) / (1 + wGyro)
Now let's normalize this vector again:
R = SQRT(RxEst(n) ^2 + RyEst(n)^2 + RzEst(n)^2 )
RxEst(n) = RxEst(n)/R
RyEst(n) = RyEst(n)/R
RzEst(n) = RzEst(n)/R
And we're ready to repeat our loop again.
NOTE: FOR PRACTICAL IMPLEMENTATION AND TESTING OF THIS ALGORITHM PLEASE READ THIS ARTICLE:
http://starlino.com/imu_kalman_arduino.html
Other Resources on Accelerometer and Gyroscope IMU Fusion:
http://www.mikroquad.com/pub/Research/ComplementaryFilter/filter.pdf
http://stackoverflow.com/questions/1586658/combine-gyroscope-and-accelerometer-data
http://www.dimensionengineering.com/accelerometers.htm
//starlino//
[转]A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications.的更多相关文章
- A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications.
介绍 本指南的目的是大家感兴趣的惯性MEMS(微机电系统)传感器,特别是加速计和陀螺仪和IMU组合设备(惯性测量单元). 例如IMU单位:Acc_Gyro_6DOF对MCU处理单元UsbThumb提供 ...
- Event Handling Guide for iOS--(一)--About Events in iOS
About Events in iOS Users manipulate their iOS devices in a number of ways, such as touching the scr ...
- P6 EPPM Installation and Configuration Guide 16 R1 April 2016
P6 EPPM Installation and Configuration Guide 16 R1 April 2016 Contents About Installing and ...
- Globalization Guide for Oracle Applications Release 12
Section 1: Overview Section 2: Installing Section 3: Configuring Section 4: Maintaining Section 5: U ...
- 使用 Windows 10 中的加速度计(Accelerometer,重力传感器)
在做 UWP 应用开发的时候还有什么理由可以用到加速度计呢?场景很多啦,比如做游戏,做类似 Surface Hub 那种一边旋转,一边所有内容跟着一起转的效果. Windows 10 UWP 中的加速 ...
- [心平气和读经典]The TCP/IP Guide(003)
The TCP/IP Guide [Page 43, 44] Scope of The TCP/IP Guide | 本书的讨论范围 The first step to dealing with a ...
- (转) [it-ebooks]电子书列表
[it-ebooks]电子书列表 [2014]: Learning Objective-C by Developing iPhone Games || Leverage Xcode and Obj ...
- 【机器学习Machine Learning】资料大全
昨天总结了深度学习的资料,今天把机器学习的资料也总结一下(友情提示:有些网站需要"科学上网"^_^) 推荐几本好书: 1.Pattern Recognition and Machi ...
- [stm32] MPU6050 HMC5883 Kalman 融合算法移植
一.卡尔曼滤波九轴融合算法stm32尝试 1.Kalman滤波文件[.h已经封装为结构体] /* Copyright (C) 2012 Kristian Lauszus, TKJ Electronic ...
随机推荐
- Ubuntu远程连接windows
一般情况下都是使用windows系统,通过mstsc远程连接linux系统,但对于一些linuxer来说,有时候需要远程连接一下windows,最后采用的是rdesktop,一个非常好用的工具 sud ...
- OpenSSL - 网络安全之数据加密和数字证书
功能应用: 消息摘要,给文件或数据生成消息摘要,消息摘要只能校验数据的完整性,如SHA.MD5 数据加密和解密:对数据进行加密解密,OpenSSL实现了所有加密算法 数字证书:可以通过命令行或代码生成 ...
- ecshop安装常见问题及解决办法
一,Ecshop首页出现报错:Only variables should be passed by referen 最近想安装一个ECSHOP商城上去,老是报错,出现下面这就话: Strict Sta ...
- Linux sed 替换第一次出现的字符串
/********************************************************************************* * Linux sed 替换第一次 ...
- Canvas旋转元素
Canvas是HTML5的画布元素,有时需要按指定角度旋转某一个元素. var canvas = document.getElementById("mycanvas"); var ...
- python数据结构与算法——桶排序
桶排序的时间复杂度是O(M+N),通过建立对原始数据的有序统计表,实现非常快速的排序过程 可以用hashtable(或者dict)实现,查询复杂度为O(1) 贴代码: # 简单桶排序 从小到大 def ...
- 循环神经网络(RNN, Recurrent Neural Networks)介绍(转载)
循环神经网络(RNN, Recurrent Neural Networks)介绍 这篇文章很多内容是参考:http://www.wildml.com/2015/09/recurrent-neur ...
- pycharm安装
license server http://idea.lanyus.com
- phpstorm的快捷键
F5复制 F6移动 Alt + Delete键安全删除 Shift + F6重命名 按Ctrl + Alt + N内联变量 按Ctrl + Alt + M提取方法(Javascript的唯一) 按Ct ...
- px和em区别-在font-size的 css 的使用
px像素(Pixel).相对长度单位.像素px是相对于显示器屏幕分辨率而言的. em是相对长度单位.相对于当前对象内文本的字体尺寸,多理解父级设定font-size的尺寸.如当前对行内文本的字体尺寸未 ...