MAVLink v1.0详解——结构
本文针对 MAVLink v1.0版本,协议版本:3。
MAVLink是为微型飞行器MAV(Micro Air Vehicle)设计的(LGPL)开源的通讯协议。是无人飞行器和地面站(Ground Control Station ,GCS)之间,以及无人飞行器之间通讯常用的协议。APM、PIXHAWK飞控,Mission Planner、QGroundControl地面站均使用了MAVLink协议进行通讯。
MAVLink源码下载地址(现已更新至v2.0):https://github.com/mavlink/qgroundcontrol
用户手册:https://docs.qgroundcontrol.com/en/
MAVLink源文件结构

1、 common文件夹:原始的MAVLink消息,包括各种消息的头文件
common.h:定义MAVLink各个消息包中用到的枚举类型,各个消息包对应的CRC—EXTRA值、LENGTH值,包含(include)各个消息包的头文件
各个消息的头文件:1)定义消息内容对应的数据结构,2)打包、发送消息的便捷函数,3)消息包解析并获取各个参数
2、 autopilotmega,ASLUAV,pixhawk等文件夹:这些文件夹包含各个飞控自定义的MAVLink消息类型
3、 checksum.h:计算校验码的代码
4、 mavlink_conversions.h:dcm,欧拉角,四元数之间的转换
5、 mavlink_helper.h:提供各种便捷函数:
1)将各个消息包补充完整并发送。将数据载荷加上消息帧的头部,如sysid和compid等,计算校验码,补充成为完整的mavlink消息包后发送;
2)MAVLink消息包解析。
6、 mavlink_types.h:定义用到的各种基本结构体(如mavlink_message_t)、枚举类型(如 mavlink_param_union_t)
MAVLink消息包结构
MAVLink传输时,以消息包作为基本单位,数据长度为8~263字节。消息数据包的结构如下:

|
字节索引 |
内容 |
值 |
解释 |
|
|
STX |
0 |
包起始标志 |
v1.0:0xFE |
包的起始标志,在v1.0中以“FE”作为起始标志(FE=254) |
|
LEN |
1 |
有效载荷长度 |
0~255 |
有效载荷数据的字节长度(N) |
|
SEQ |
2 |
包的序列号 |
0~255 |
每发送完一个消息,内容加1。用以检测丢包情况 |
|
SYS |
3 |
系统ID编号 |
1~255 |
发送本条消息包的系统/飞行器的编号。用于消息接收端在同一网络中识别不同的MAV系统 |
|
COMP |
4 |
部件ID编号 |
0~255 |
发送本条消息包的部件的编号。用于消息接收端在同一系统中区分不同的组件,如IMU和飞控 |
|
MSG |
5 |
消息包ID编号 |
0~255 |
有效载荷中消息包的编号。该id定义了有效载荷内放的是什么类型的消息,以便消息接收端正确地解码消息包 |
|
PAYLOAD |
6~N+6 |
有效载荷数据 |
0~255字节 |
要用的数据放在有效载荷里。内容取决于message id。 |
|
CKA |
N+7 |
校验和低字节 |
16位校验码; ITU X.25/SAE AS-4哈希校验(CRC-16-CCITT),不包括数据包起始位,从第一个字节到有效载荷(字节1 ..(N+6))进行crc16计算(还要额外加上一个MAVLINK_CRC_EXTRA字节),得到一个16位校验码 |
|
|
CKB |
N+8 |
校验和高字节 |
注:校验(checksum)功能。加入MAVLINK_CRC_EXTRA,当两个通讯终端之间(飞行器和地面站,或飞行器和飞行器)使用不同版本的MAVLink协议时,双方计算得到的校验码会不同,则不同版本的MAVLink协议之间将无法通讯。MAVLINK_MESSAGE_CRCS中存储了每种消息包对应的MAVLINK_CRC_EXTRA。这个 MAVLINK_CRC_EXTRA在用python生成MAVLink代码时在common.h头文件中自动生成。
MAVLink数据包的结构在mavlink_types.h中用mavlink_message_t结构体定义:
typedef struct __mavlink_message {
uint16_t checksum; /// CRC
uint8_t magic; /// STX
uint8_t len; /// LEN
uint8_t seq; /// SEQ
uint8_t sysid; /// SYS
uint8_t compid; /// COMP
uint8_t msgid; /// MSG
uint64_t payload64[(MAVLINK_MAX_PAYLOAD_LEN+MAVLINK_NUM_CHECKSUM_BYTES+)/];
} mavlink_message_t;
MAVLINK Common Message Set
MAVLink通用消息集可以在《MAVLLINK Common Message set specifications》文档中查看。这些消息定义了通用消息集,这是大多数地面控制站和自动驾驶仪实现的参考消息集,头文件包含在common文件夹中。
分为两部分:MAVLink Type Enumerations(MAVLink类型枚举 )和MAVLink Messages(MAVLink消息包)。
MAVLink Type Enumerations
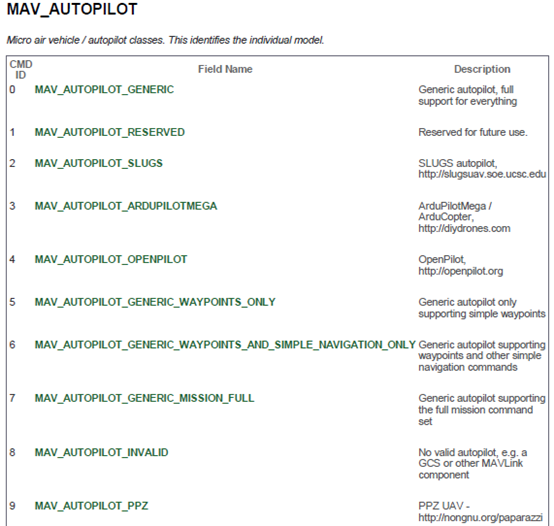
MAVLink Type Enumerations在common.h文件中定义。如下,枚举变量定义了飞行器的类型MAV_AUTOPILOT。
typedef enum MAV_AUTOPILOT
{
MAV_AUTOPILOT_GENERIC=, /* Generic autopilot, full support for everything | */
MAV_AUTOPILOT_RESERVED=, /* Reserved for future use. | */
MAV_AUTOPILOT_SLUGS=, /* SLUGS autopilot, http://slugsuav.soe.ucsc.edu | */
MAV_AUTOPILOT_ARDUPILOTMEGA=, /* ArduPilotMega / ArduCopter, http://diydrones.com | */
MAV_AUTOPILOT_OPENPILOT=, /* OpenPilot, http://openpilot.org | */
MAV_AUTOPILOT_GENERIC_WAYPOINTS_ONLY=, /* Generic autopilot only supporting simple waypoints | */
MAV_AUTOPILOT_GENERIC_WAYPOINTS_AND_SIMPLE_NAVIGATION_ONLY=, /* Generic autopilot supporting waypoints and other simple navigation commands | */
MAV_AUTOPILOT_GENERIC_MISSION_FULL=, /* Generic autopilot supporting the full mission command set | */
MAV_AUTOPILOT_INVALID=, /* No valid autopilot, e.g. a GCS or other MAVLink component | */
MAV_AUTOPILOT_PPZ=, /* PPZ UAV - http://nongnu.org/paparazzi | */
MAV_AUTOPILOT_UDB=, /* UAV Dev Board | */
MAV_AUTOPILOT_FP=, /* FlexiPilot | */
MAV_AUTOPILOT_PX4=, /* PX4 Autopilot - http://pixhawk.ethz.ch/px4/ | */
MAV_AUTOPILOT_SMACCMPILOT=, /* SMACCMPilot - http://smaccmpilot.org | */
MAV_AUTOPILOT_AUTOQUAD=, /* AutoQuad -- http://autoquad.org | */
MAV_AUTOPILOT_ARMAZILA=, /* Armazila -- http://armazila.com | */
MAV_AUTOPILOT_AEROB=, /* Aerob -- http://aerob.ru | */
MAV_AUTOPILOT_ASLUAV=, /* ASLUAV autopilot -- http://www.asl.ethz.ch | */
MAV_AUTOPILOT_ENUM_END=, /* | */
} MAV_AUTOPILOT;
MAVLink Messages
MAVLink Messages在common文件夹内每个消息包的头文件中定义。在文档中msgid以蓝色的“#”加数字的方式来表示,如心跳包的“#0”,在心跳包的头文件mavlink_msg_heartbeat.h中,MAVLINK_MSG_ID_HEARTBEAT对应心跳包的message ID,为0。
#define MAVLINK_MSG_ID_HEARTBEAT 0
心跳包的内容存放在payload数据载荷中。以心跳包为例,

typedef struct __mavlink_heartbeat_t
{
uint32_t custom_mode; /*< A bitfield for use for autopilot-specific flags.*/
uint8_t type; /*< Type of the MAV (quadrotor, helicopter, etc., up to 15 types, defined in MAV_TYPE ENUM)*/
uint8_t autopilot; /*< Autopilot type / class. defined in MAV_AUTOPILOT ENUM*/
uint8_t base_mode; /*< System mode bitfield, see MAV_MODE_FLAG ENUM in mavlink/include/mavlink_types.h*/
uint8_t system_status; /*< System status flag, see MAV_STATE ENUM*/
uint8_t mavlink_version; /*< MAVLink version, not writable by user, gets added by protocol because of magic data type: uint8_t_mavlink_version*/
} mavlink_heartbeat_t;
心跳包一般用来表明发出该消息的设备是否活跃(一般以1Hz发送),消息接收端会根据是否及时收到了心跳包来判断是否和消息发送端失去了联系。
心跳包由6个数据成员组成,占用9个字节。
1、 type:飞行器类型,表示了当前发消息的是什么飞行器,如四旋翼,直升机等。type的取值对应枚举类型MAV_TYPE(如四旋翼,对应数值2)。
2、autopilot:飞控类型,如apm,Pixhawk等,发送心跳包的飞行器的飞控类型。autopilot的取枚举类型MAV_AUTOPILOT。
3、base mode(基本模式):飞控现在所处的飞行模式,这个参数要看各个飞控自己的定义方式,会有不同的组合、计算方式。
4、custom mode(用户模式):飞控现在所处的飞行模式,这个参数要看各个飞控自己的定义方式,会有不同的组合、计算方式。
5、system status:系统状态,见MAV_STATE枚举变量。
6、mavlink version:消息发送端的MAVLink版本。
其余的消息也是类似的结构,基本消息的定义可以查看官方网页的说明(具体说明以各个飞控为准),也可查看各个消息包头文件的定义。
MAVLink v1.0详解——结构的更多相关文章
- 百度大脑UNIT3.0详解之知识图谱与对话
如今,越来越多的企业想要在电商客服.法律顾问等领域做一套包含行业知识的智能对话系统,而行业或领域知识的积累.构建.抽取等工作对于企业来说是个不小的难题,百度大脑UNIT3.0推出「我的知识」版块专门为 ...
- 百度大脑UNIT3.0详解之嵌入式对话理解技术
相信很多人都体验过手机没有网时的焦虑,没有网什么也做不了.而机器人也会遇到这样的时刻,没有网或者网络环境不好的情况下,无法识别用户在说什么,也无法回复用户.在AIoT(AI+物联网)飞速普及的现在,智 ...
- 百度大脑UNIT3.0详解之数据生产工具DataKit
在智能对话项目搭建的过程中,高效筛选.处理对话日志并将其转化为新的训练数据,是对话系统效果持续提升的重要环节,也是当前开发者面临的难题之一.为此百度大脑UNIT推出学习反馈闭环机制,提供数据获取.辅助 ...
- Mongostat 3.0详解
可以参考之前写的这篇博客: Mongostat 2.6详解 mapped Changed in version 3.0.0. Only for MMAPv1 Storage Engine. The t ...
- 菜鸟学习-C语言函数参数传递详解-结构体与数组 分类: C/C++ Nginx 2015-07-14 10:24 89人阅读 评论(0) 收藏
C语言中结构体作为函数参数,有两种方式:传值和传址. 1.传值时结构体参数会被拷贝一份,在函数体内修改结构体参数成员的值实际上是修改调用参数的一个临时拷贝的成员的值,这不会影响到调用参数.在这种情况下 ...
- iOS中 蓝牙2.0详解/ios蓝牙设备详解 韩俊强的博客
每日更新关注:http://weibo.com/hanjunqiang 新浪微博 整体布局如下: 程序结构如右图: 每日更新关注:http://weibo.com/hanjunqiang ...
- setTimout( , 0) 详解
setTimout( , 0) 一.前言 前端工程师们工作久了,一般都会在某些地方看见过这样的代码: setTimeout(function(){ // TODO }, 0); 举个实例,移动端我们经 ...
- php踩过的那些坑(4) false,NULL,0,''详解
一.前方有坑 php开发过程中,难免会遇到这四个值:false,null,0,’',并且也会对这四个值进行比较,然后分别进行业务代码处理.一招不慎,就会踩到坑,影响数据判断的正确性和安全性,以至于造成 ...
- CM自动化安装CDH5.14.0详解
CDH5.14.0版本说明 CDH最早版本只包含hadoop.hive.hbase等基础组件,CDH5.14.0版本目前已经封装了spark.impala.kudu(CDH 5.13.x开始)等众多组 ...
随机推荐
- [USACO12NOV]同时平衡线Concurrently Balanced Strings DP map 思维
题面 [USACO12NOV]同时平衡线Concurrently Balanced Strings 题解 考虑DP. \(f[i]\)表示以\(i\)为左端点的合法区间个数.令\(pos[i]\)表示 ...
- Java之NIO,BIO,AIO
Hollis知识星球的一些学习笔记,有兴趣的朋友可以微信搜一下 什么是NIO 什么是IO? 它是指计算机与外部世界或者一个程序与计算机的其余部分的之间的接口.它对于任何计算机系统都非常关键,因而所有 ...
- React-Router 动画 Animation
React-Router动画实际上和React动画没什么区别,都是使用 'react-addons-css-transition-group' 这个组件:但是,和普通的 React-Router 的 ...
- Activiti工作流的应用示例
1.新建流程模型 模型管理->模型工作区 点击"创建"后会立即跳转到"流程在线设计器"页面,请参考下一节 2.在线流程设计器 模型管理->模型工作区 ...
- php static 变量用法
有时候我们可能需要重复调用一个函数,里面有些变量不需要重复初始化.初始化成本比较高的,我们可以使用 static 关键字修饰,在该变量没有初始化的时候才进行初始化,初始化过的变量就不再初始化.如: f ...
- Rstdio快捷键总结
Rstdio常用快捷键总结 在R语言里面输入了一个不完整的指令以后 左下方的console pane一直有加号+,不管输入什么都是加号,只用推出重新打开Rstudio才行,后来google了下,按左上 ...
- 一个最简单的使用Entity Framework 查询SQL 数据库的例子
1.ADO.NET 3.5 Entity Framework是随着.net framework 3.5一起发布的,确认开发环境版本是大于等于3.5版本 2.确认已经安装了ADO.NET 3.5 Ent ...
- android中倒计时控件CountDownTimer分析
android中倒计时控件CountDownTimer分析 1 示例代码 new CountDownTimer(10000, 1000) { public void onTick(long milli ...
- HTTP协议(3):HTTP1.1与HTTP1.0的区别
翻了下HTTP1.1的协议标准RFC2616,下面是看到的一些它跟HTTP1.0的差别. 1. Persistent Connection持久连接 在HTTP1.0中,每对Request/Respon ...
- 如何创建一个 Lua 模块
如何创建一个 Lua 模块 翻译自: How to Create a Lua Module 译者: FreeBlues 正文 Lua编程语言 中的一个 模块(module)是一个包含函数和变量的代码片 ...