虚拟基站(VRS)
虚拟参考站技术(Virtual Reference Station,简称VRS)也称虚拟基准站技术,是一种网络实时动态测量实时动态测量(RTK)技术,通过在某一区域内建立构成网状覆盖的多个GPS基准站,在流动站附近建立一个虚拟基准站,根据周围各基准站上的实际观测值算出该虚拟基准站的虚拟观测值,实现用户站的高精度定位。
虚拟参考站技术主要由控制中心、固定站和用户3部分组成。与常规的RTK测量不同,VRS网络各固定参考站不直接向移动用户发送任何改正信息,而是将所有的原始数据通过数据通讯线发给控制中心。同时,移动用户在工作前,先通过GSM的短信息功能向控制中心发送一个概略坐标,控制中心收到这个位置信息后,根据用户位置,由计算机自动选择最佳的一组固定基准站,根据这些站发出来的信息,整体的改正GPS的轨道误差,电离层,对流层和大气折射引起的误差,将高精度的差分信号发送给移动站。这个差分信号的效果相当于在移动站旁边,生成一个虚拟的参考基站,从而解决了RTK作业距离上的限制问题,并保证了用户的精度。2000年,美国天宝公司正式推出了该项技术。
一、虚拟基准站的优缺点
优点:
- VRS最突出优势是覆盖范围更广:VRS网络中固定参考站的距离增大,站间距离可达到70KM,三个站覆盖的面积可以达到2100多平方公里。
缺点:
- 采用双向通信,限制了它的同时在线用户数量。
- 虚拟参考基站随着用户(流动站)的移动(超过一定距离)要重新初始化,并且是不可追踪、不可重复的虚拟的参考基站。
- 人为的规定了一个参考站站网中参考站的数量,一般情况下为三个。它们是由参考站软件所决定的,用于计算流动站所需要的改正数。此项约束限制了系统采用合适数量的参考站解决占主导地位的大气条件。
- 其播发的数据格式不标准,偏向某一类型的接收机(天宝还是希望你买它的接收机)。
二、虚拟基准站的计算方法
虚拟基准站主要是在移动站附近虚拟出一个基准站,通过网络技术将多个参考站的数据传递给控制中心,控制中心通过一定的算法模拟虚拟站的观测值,最后将虚拟的观测值传给移动站实现差分定位。虚拟基准站参考站的位置通常是在移动站周围5千米范围内,但实际情况中一般是几米内。
- 卫星位置是已知的(广播星历/SP3精密星历) XYZ1。
- 虚拟基站的位置是已知的(GGA初始化的) XYZ2。
- 主参考站的位置是已知的(前期联测IGS获得) XYZ3。
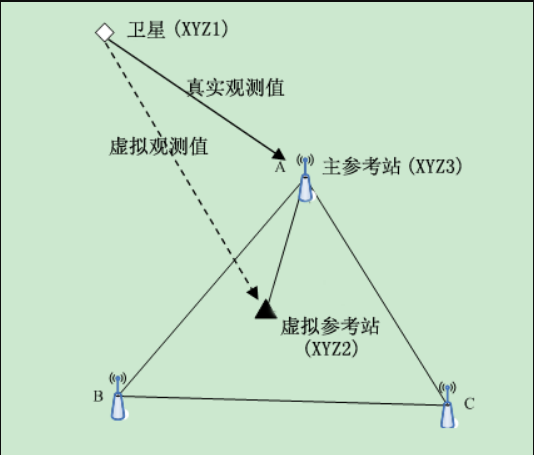
空间中三点(XYZ1,XYZ2,XYZ3)的相互距离很容易算出来。设虚拟参考站与卫星距离是P1,主参考站与卫星距离是P2 ,假设虚拟参考站的载波相位模糊度与主参考站的载波相位模糊度相同。那么就可以在主参考站的实际观测值(L1/L2)上加减几何上的差值(P1与P2的差值),这样就可以得到虚拟参考站的观测值。我们把这个值叫做虚拟观测值。
三、虚拟基准站的定位精度
通过网络信息和参考相关文献得知,目前通过虚拟参考站的定位精度只能达到厘米级。在VRS快速动态定位模式时,还受到如整周模糊度解算等误差影响,且对流层延时采用Hopfild模型或Saanstamoinen模型等,在这种情况下估算得到的坐标解算标准差为2.193.62cm,在差分事后处理模式时,多采用GAMIT软件进行基线解算,此时估算得到的坐标标准差约为1.753.37cm。要想使坐标介绍算标准差达到1cm的高精度,除必须采用差分事后处理模式外,还需要保证相邻基站的基线不超过24km。
参考文献
VRS虚拟参考站:http://www.360doc.com/content/14/0727/16/9024860_397435223.shtml
三句话明白VRS基本原理:http://blog.sina.com.cn/s/blog_6fe174db0101234z.html
虚拟参考站(百度百科):https://baike.baidu.com/item/虚拟参考站/10491331?fr=aladdin
虚拟参考站(VRS)系统的定位精度分析:https://www.doc88.com/p-608276208951.html
虚拟基站(VRS)的更多相关文章
- Win8共享wifi热点设置
Win8共享wifi热点如何设置?大家都知道win7系统可以实现wifi热点共享,那么win8应该也能实现wifi热点共享,那么如何设置win8不需要任何软件只需要对电脑进行设置就可以共享无线上网. ...
- C-RAN
无线接入网(RAN)是移动运营商赖以生存的重要资产.传统的无线接入网具有以下特点: 1. 每一个基站连接若干个固定数量的扇区天线,并覆盖小片区域,每个基站只能处理本小区收发信号: 2. 系统的容量是干 ...
- 一文解读5G (转)
今天要研究的对象,是5G接入网. 什么是接入网?相信不少同学,对这个概念一定不会陌生. 搬出这张移动通信架构图: 接入网,在我们无线通信里,一般指无线接入网,也就是通常所说的RAN(Radio Acc ...
- 第3 章 802.11 MAC
一 前言 802.11 规格的关键在于MAC(介质访问控制层),属于数据链路层,它定义了数据帧怎样在介质上进行传输.MAC 位于各种物理层之上,控制数据的传输.不同的物理层可以提供不同的传输速度,不过 ...
- VRS生成的虚拟观测值存在的问题
目前生成的虚拟观测值. 天津的版本,如果有数据库中有天线类型,那么会对天线类型改正了两次. 解决方法:在生成虚拟观测值编码的部分,注释掉天线改正的部分. 对结果的影响:错误版本生成的虚拟观测值,移动站 ...
- 虚拟参考站(VRS)
来源:https://www.sohu.com/a/149415053_391994 一.高精度定位 VRS是虚拟参考站(Virtual Reference Station)的简称.这项技术是CORS ...
- 如何低成本的打造HTC Vive虚拟演播室直播MR视频?
http://m.toutiao.com/i6298923859378700802/?tt_from=weixin&utm_campaign=client_share&from=gro ...
- Android Service获取当前位置(GPS+基站)
需求详情:1).Service中每隔1秒执行一次定位操作(GPS+基站)2).定位的结果实时显示在界面上(要求得到经度.纬度)技术支持:1).获取经纬度通过GPS+基站获取经纬度,先通过GPS来获取, ...
- 技术分析:Femtocell家庭基站通信截获、伪造任意短信
阿里移动安全团队与中国泰尔实验室无线技术部的通信专家们一起,联合对国内运营商某型Femtocell基站进行了安全分析,发现多枚重大漏洞,可导致用户的短信.通话.数据流量被窃听.恶意攻击者可以在免费申领 ...
随机推荐
- 如何在Linux下部署Samba服务?
Samba简介 Samba是在Linux和UNIX系统上实现SMB协议的一个免费软件,由服务器及客户端程序构成.SMB(Server Messages Block,信息服务块)是一种在局域网上共享文件 ...
- Akamai CDN刷新(通过Akamai cli 自动刷新)
1.刷新类型选择 根据官方介绍,可使用多种途径和方式来完成快速刷新 按照简便快捷高效的要求,暂时选择Akamai cli + url 来完成刷新. 2.二进制文件下载地址 文件下载地址:https:/ ...
- 8、负载均衡HAproxy部署
8.1.基本环境说明: 服务器名(centos7) ip地址 安装软件 slave-node1 172.16.1.91 haproxy1.8.15,tomcat8.5.37(8080.8081实例), ...
- 40、mysql数据库(触发器)
1.触发器说明: 使用触发器可以定制用户对表进行[增.删.改]操作时前后的行为,注意:没有查询. 2.创建触发器语法: (1)插入前: CREATE TRIGGER tri_before_insert ...
- ssh-正向与反向代理
常用参数 栗子 实战 常用参数 -N 告诉SSH客户端,这个连接不需要执行任何命令.仅仅做端口转发 -C 表示压缩数据传输 -f 告诉SSH客户端在后台运行 -q Quiet mode. 安静模式,忽 ...
- Algorithm:Java加密解密之MAC(消息认证码)
MD5 消息摘要(数字摘要) 它是把一个文本/文件 通过摘要函数(hash函数)计算出一个结果.然后把文本/文件和摘要结果一同发给接受者接受者接收到文件之后,也进行摘要,把两个摘要结果进行对比.如果一 ...
- Dubbo:dubbo管理界面安装
首先需要Tomcat.Zookeeper安装后在进行安装Dubbo管理界面 提供Dubbo-admin管理界面war包: https://github.com/zhaoyue123ABC/Publi ...
- linux学习之路第三天
开机,重启和用户登陆注销 关机&重启命令 shutdown shutdown -h now :表示立即关机 shutdown -h 1 :表示一分钟后关机 shutdown -r now :表 ...
- vm虚拟机无法与本地ping通
打本地靶场,发现无法找到localhost,而且也ping不通,当时挺迷的,所以百度了一下方法,以下是内容: 一.解决方式 1. 2.点击设置 3. 4. 点击nat模式 5. 通了, 二.nat模式 ...
- XSS challenges 1-10
学长发的xss靶场,刚好js学完了,上手整活. 这个提示说非常简单,直接插入就完事了 <script>alert(document.domain)</script> 第二关. ...