【UE4 C++ 基础知识】<12> 多线程——FRunnable
概述
- UE4里,提供的多线程的方法:
- 继承
FRunnable接口创建单个线程 - 创建
AsyncTask调用线程池里面空闲的线程 - 通过
TaskGraph系统来异步完成一些自定义任务 - 支持原生的多线程
std::thread
- 继承
- 在GameThread线程之外的其他线程中
- 不要 spawning / modifying / deleting UObjects / AActors
- 不要使用定时器 TimerManager
- 不要使用任何绘制接口,例如 DrawDebugLine,然有可能崩溃
- 如果想做的话,可以在主线程中异步处理
- 其他线程中一般做数据收发和解析,数学运算等
本文主要介绍 FRunnable 类
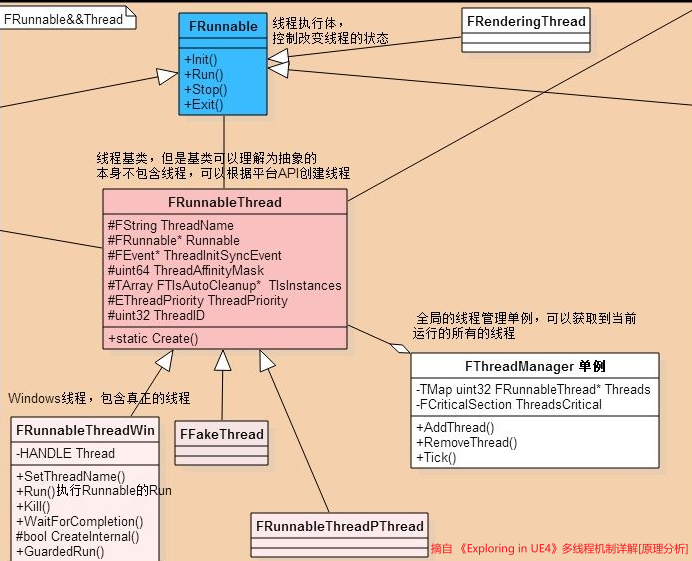
FRunnable
FRunnable是UE4中多线程的实现方式之一,适用于复杂运算
FRunnable 是线程的执行体,提供相应的接口。FRunnable需要依附与一个FRunnableThread对象,才能被执行
class CORE_API FRunnable
{
public:
// ....
virtual bool Init(); // 初始化 runnable 对象,在FRunnableThread创建线程对象后调用 virtual uint32 Run() = 0; // Runnable 对象逻辑处理主体,在Init成功后调用 virtual void Stop() {} // 停止 runnable 对象, 线程提前终止时被用户调用 virtual void Exit() {} // 退出 runnable 对象,由FRunnableThread调用
};
FRunnableThread 表示一个可执行的线程,该类会派生出平台相关的子类。通过调用
FRunnableThread::Create完成线程的创建
快速创建一个线程
创建 FRunnable 派生类
// .h
class TIPS_API FSimpleRunnable: public FRunnable
{
public:
FSimpleRunnable(const FString& ThreadName);
~FSimpleRunnable();
void PauseThread(); // 线程挂起 方法一
void WakeUpThread(); // 线程唤醒 方法一
void Suspend(bool bSuspend); // 线程挂起/唤醒 方法二
void StopThread(); // 停止线程,一般用该方法
void ShutDown(bool bShouldWait);// 停止线程,bShouldWait true的时候可强制 kill 线程
private:
FString m_ThreadName;
int32 m_ThreadID;
bool bRun = true; // 线程循环标志
bool bPause = false; //线程挂起标志
FRunnableThread* ThreadIns; // 线程实例
FEvent* ThreadEvent; //FEvent指针,挂起/激活线程, 在各自的线程内使用
virtual bool Init() override;
virtual uint32 Run() override;
virtual void Stop() override;
virtual void Exit() override;
};
// .cpp
FSimpleRunnable::FSimpleRunnable(const FString& ThreadName)
{
// 获取 FEvent 指针
ThreadEvent = FPlatformProcess::GetSynchEventFromPool();
// 创建线程实例
m_ThreadName = ThreadName;
ThreadIns = FRunnableThread::Create(this, *m_ThreadName, 0, TPri_Normal);
m_ThreadID = ThreadIns->GetThreadID();
UE_LOG(LogTemp, Warning, TEXT("Thread Start! ThreadID = %d"), m_ThreadID);
}
FSimpleRunnable::~FSimpleRunnable()
{
if (ThreadEvent) // 清空 FEvent*
{
FPlatformProcess::ReturnSynchEventToPool(ThreadEvent); // delete ThreadEvent;
ThreadEvent = nullptr;
}
if (ThreadIns) // 清空 FRunnableThread*
{
delete ThreadIns;
ThreadIns = nullptr;
}
}
bool FSimpleRunnable::Init()
{
return true; //若返回 false ,线程创建失败,不会执行后续函数
}
uint32 FSimpleRunnable::Run()
{
int32 count = 0;
FPlatformProcess::Sleep(0.03f); //延时,等待初始化完成
while (bRun)
{
if (bPause)
{
ThreadEvent->Wait(); // 线程挂起
if (!bRun) // 线程挂起时执行线程结束
{
return 0;
}
}
UE_LOG(LogTemp, Warning, TEXT("ThreadID: %d, Count: %d"),m_ThreadID, count);
count++;
FPlatformProcess::Sleep(0.1f); // 执行间隔,防止堵塞
}
return 0;
}
void FSimpleRunnable::Stop()
{
bRun = false;
bPause = false;
if (ThreadEvent)
{
ThreadEvent->Trigger(); // 保证线程不挂起
}
Suspend(false); // 保证线程不挂起,本例只是为了暂时不同的挂起方法,如果不使用Suspend(),无需使用
}
void FSimpleRunnable::Exit()
{
UE_LOG(LogTemp, Warning, TEXT("Thread Exit!"));
}
void FSimpleRunnable::PauseThread()
{
bPause = true;
UE_LOG(LogTemp, Warning, TEXT("Thread Pause!"));
}
void FSimpleRunnable::WakeUpThread()
{
bPause = false;
if (ThreadEvent)
{
ThreadEvent->Trigger(); // 唤醒线程
}
UE_LOG(LogTemp, Warning, TEXT("Thread Wakeup!"));
}
void FSimpleRunnable::Suspend(bool bSuspend)
{
if (ThreadIns)
{
ThreadIns->Suspend(bSuspend); //挂起/唤醒
}
}
void FSimpleRunnable::StopThread()
{
Stop();
ThreadIns->WaitForCompletion(); // 等待线程执行完毕
}
void FSimpleRunnable::ShutDown(bool bShouldWait)
{
if (ThreadIns)
{
ThreadIns->Kill(bShouldWait); // bShouldWait 为false,Suspend(true)时,会崩
}
}
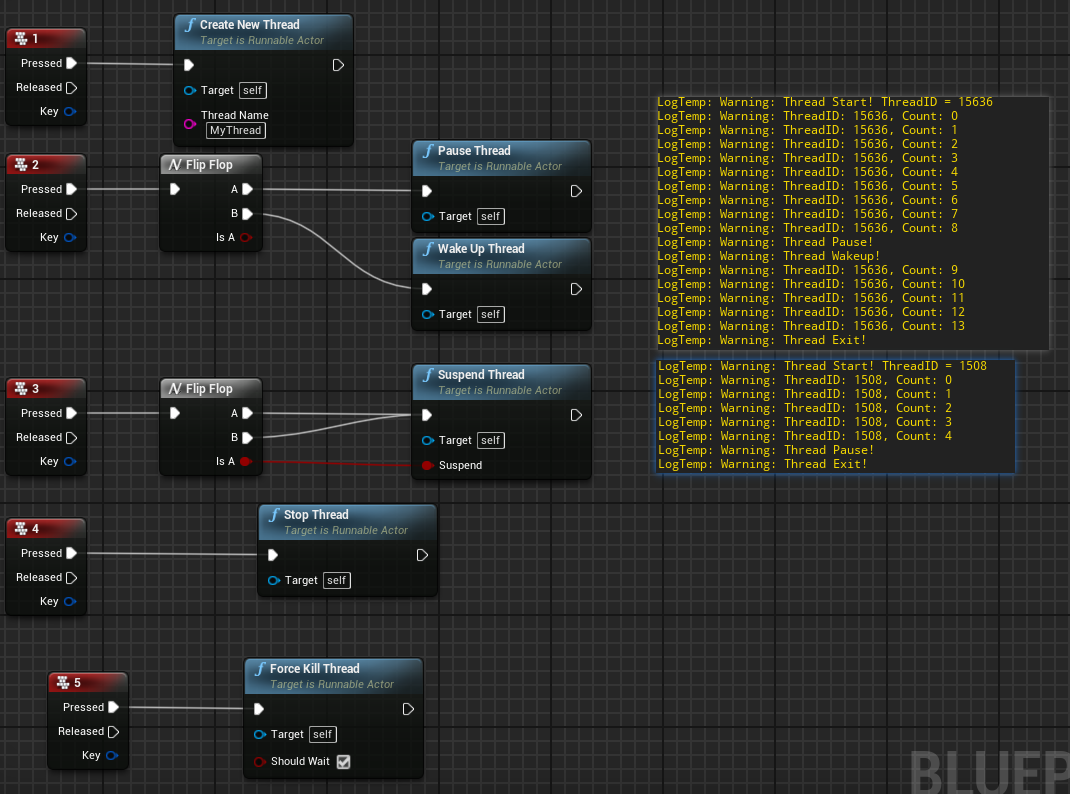
创建调用多线程的Actor
// .h
protected:
virtual void EndPlay(const EEndPlayReason::Type EndPlayReason) override;
private:
FSimpleRunnable* SimpleRunnable;
public:
UFUNCTION(BlueprintCallable)
void CreateNewThread(const FString& ThreadName);
UFUNCTION(BlueprintCallable)
void PauseThread();
UFUNCTION(BlueprintCallable)
void SuspendThread(bool bSuspend);
UFUNCTION(BlueprintCallable)
void WakeUpThread();
UFUNCTION(BlueprintCallable)
void StopThread();
UFUNCTION(BlueprintCallable)
void ForceKillThread(bool bShouldWait);
};
// .cpp
void ARunnableActor::EndPlay(const EEndPlayReason::Type EndPlayReason)
{
if (SimpleRunnable) // 防止线程挂起,退出无响应
{
SimpleRunnable->StopThread();
delete SimpleRunnable;
SimpleRunnable = nullptr;
}
}
void ARunnableActor::CreateNewThread(const FString& ThreadName)
{
SimpleRunnable = new FSimpleRunnable(ThreadName);
}
void ARunnableActor::PauseThread()
{
if (SimpleRunnable)
{
SimpleRunnable->PauseThread();
}
}
void ARunnableActor::SuspendThread(bool bSuspend)
{
if (SimpleRunnable)
{
SimpleRunnable->Suspend(bSuspend);
}
}
void ARunnableActor::WakeUpThread()
{
if (SimpleRunnable)
{
SimpleRunnable->WakeUpThread();
}
}
void ARunnableActor::StopThread()
{
if (SimpleRunnable)
{
SimpleRunnable->StopThread();
}
}
void ARunnableActor::ForceKillThread(bool bShouldWait)
{
if (SimpleRunnable)
{
SimpleRunnable->ShutDown(bShouldWait);
delete SimpleRunnable;
SimpleRunnable = nullptr;
}
}
单例线程
- 当希望线程只能创建一次时,可以通过声明静态单例FRunnable (本例为FSimpleRunnable)
// .h
static FSimpleRunnable* MySimpleRunnable; // 声明静态单例
static FSimpleRunnable* JoyInit(); // 声明静态方法
// cpp
// 初始化静态单例
FSimpleRunnable* FSimpleRunnable::MySimpleRunnable = nullptr;
//创建 SimpleRunnable 实例
FSimpleRunnable* FSimpleRunnable::JoyInit()
{
if (!MySimpleRunnable && FPlatformProcess::SupportsMultithreading())
{
MySimpleRunnable = new FSimpleRunnable();
}
return MySimpleRunnable;
}
多个线程
当希望执行多个线程时
- 可用TMap<Name, FRunnable > 存储,移除
- 也可设定线程结束条件,让其自行结束线程
线程锁
UE4 线程锁包括:
- FSpinLock 自旋锁
- FScopeLock 区域锁
- FCriticalSection 临界区
- FRWLock 读写锁
本文使用 FScopeLock 、FCriticalSection 作为测试
不使用线程锁
本例使用两个线程 为同一个整数做加法,知道该整数到达目标值
修改 SimpleRunnable 代码
FSimpleRunnable(const FString& ThreadName, int32* CurrentNumber, int32 MaxNumber); int32* m_CurrentNumber;
int32 m_MaxNumber;
int32 m_CalcCount = 0;FSimpleRunnable::FSimpleRunnable(const FString& ThreadName, int32* CurrentNumber, int32 MaxNumber)
{
/* 省略部分代码 */
m_CurrentNumber = CurrentNumber;
m_MaxNumber = MaxNumber;
/* 省略部分代码 */
} uint32 FSimpleRunnable::Run()
{ FPlatformProcess::Sleep(0.03f); //延时,等待初始化完成
while (bRun && *m_CurrentNumber<m_MaxNumber)
{
/* 省略部分代码 */
(*m_CurrentNumber)++;
m_CalcCount++;
if (m_CalcCount % 100 == 0)
{
UE_LOG(LogTemp, Warning, TEXT("ThreadID: %d, CurrentNumber: %d"),m_ThreadID, *m_CurrentNumber);
}
FPlatformProcess::Sleep(0.0001f); // 执行间隔,防止堵塞
}
return 0;
} void FSimpleRunnable::Exit()
{
UE_LOG(LogTemp, Warning, TEXT("Thread Exit! ThreadID: %d, CurrentNumber: %d, CalcCount: %d"),m_ThreadID, *m_CurrentNumber, m_CalcCount);
}
修改 RunnableActor 代码
UPROPERTY(EditAnywhere)
int32 m_MaxNumber = 1000;
void ARunnableActor::CreateNewThread(const FString& ThreadName)
{
SimpleRunnable = new FSimpleRunnable(TEXT("Thread1"), &m_CurrentNumber, m_MaxNumber);
SimpleRunnable = new FSimpleRunnable(TEXT("Thread2"), &m_CurrentNumber, m_MaxNumber);
}

使用线程锁
- 注意 FCriticalSection 是否使用 static 声明
FScopeLock
方法一
修改 SimpleRunnable 代码
{ // 注意这个作用域用于 **FScopeLock**
static FCriticalSection m_mutex; //声明 staic 可以让线程之间互锁
FScopeLock ScopeLock(&m_mutex); // 该作用域内上锁 (*m_CurrentNumber)++;
}
m_CalcCount++;
方法二
修改 SimpleRunnable 代码
static FCriticalSection m_mutex; //声明 staic 可以让线程之间互锁
FScopeLock* ScopeLock = new FScopeLock(&m_mutex); // 上锁 (*m_CurrentNumber)++; delete ScopeLock; // 解锁

FCriticalSection Lock()/UnLock()
修改 SimpleRunnable 代码
// 放在类声明static ,使用 Lock() 编译不通过
// static 可以让线程之间互锁,不使用 static 锁不生效
// 不使用 static,线程内可以上锁。可以在类中声明
static FCriticalSection m_mutex;
m_mutex.Lock(); // 上锁
(*m_CurrentNumber)++;
m_mutex.Unlock(); // 解锁

参考
- FRunnable
- FScopeLock
- UE4异步编程专题 - 多线程
- Legacy/MultiThreading and synchronization Guide
- UE4 C++基础教程 - 多线程
- Exploring in UE4》多线程机制详解[原理分析]
【UE4 C++ 基础知识】<12> 多线程——FRunnable的更多相关文章
- 【UE4 C++ 基础知识】<11>资源的同步加载与异步加载
同步加载 同步加载会造成进程阻塞. FObjectFinder / FClassFinder 在构造函数加载 ConstructorHelpers::FObjectFinder Constructor ...
- 【UE4 C++ 基础知识】<3> 基本数据类型、字符串处理及转换
基本数据类型 TCHAR TCHAR就是UE4通过对char和wchar_t的封装 char ANSI编码 wchar_t 宽字符的Unicode编码 使用 TEXT() 宏包裹作为字面值 TCHAR ...
- 【UE4 C++ 基础知识】<14> 多线程——AsyncTask
概念 AsyncTask AsyncTask 系统是一套基于线程池的异步任务处理系统.每创建一个AsyncTas,都会被加入到线程池中进行执行 AsyncTask 泛指 FAsyncTask 和 FA ...
- 【UE4 C++ 基础知识】<13> 多线程——TaskGraph
概述 TaskGraph 系统是UE4一套抽象的异步任务处理系统 TaskGraph 可以看作一种"基于任务的并行编程"设计思想下的实现 通过TaskGraph ,可以创建任意多线 ...
- java基础知识总结--多线程
1.扩展Java.lang.Thread类 1.1.进程和线程的区别: 进程:每个进程都有自己独立的代码和数据空间(进程上下文),进程间的切换会有较大的开销,一个进程包含1~n个线程. 线程:同一类线 ...
- JAVA基础知识之多线程——三种实现多线程的方法及区别
所有JAVA线程都必须是Thread或其子类的实例. 继承Thread类创建线程 步骤如下, 定义Thead子类并实现run()方法,run()是线程执行体 创建此子类实例对象,即创建了线程对象 调用 ...
- 【UE4 C++ 基础知识】<8> Delegate 委托
概念 定义 UE4中的delegate(委托)常用于解耦不同对象之间的关联:委托的触发者不与监听者有直接关联,两者通过委托对象间接地建立联系. 监听者通过将响应函数绑定到委托上,使得委托触发时立即收到 ...
- JAVA基础知识之多线程——线程组和未处理异常
线程组 Java中的ThreadGroup类表示线程组,在创建新线程时,可以通过构造函数Thread(group...)来指定线程组. 线程组具有以下特征 如果没有显式指定线程组,则新线程属于默认线程 ...
- JAVA基础知识之多线程——线程通信
传统的线程通信 Object提供了三个方法wait(), notify(), notifyAll()在线程之间进行通信,以此来解决线程间执行顺序等问题. wait():释放当前线程的同步监视控制器,并 ...
随机推荐
- Linux常用命令 - 五种创建文件命令详解
21篇测试必备的Linux常用命令,每天敲一篇,每次敲三遍,每月一循环,全都可记住!! https://www.cnblogs.com/poloyy/category/1672457.html 创建文 ...
- linux 性能统计命令
命令1 性能压力测试,yes持续输出30s到设备中空文件,然后杀掉进程 { yes> /dev/null & } && sleep 30 && ps -e ...
- Windos下通过Wpcap抓包实现两个网卡桥接
目录 1. 背景: 2. 需要的技术手段: 3. 实现逻辑: 4. 应用实例: 1. 背景: 一台电脑允许接多个网口,当然大部分只有一个网口其余都是USB扩展而来,而每个网口之间需要配置不同的网段IP ...
- openswan协商流程之(一):main_outI1()
主模式第一包:main_outI1() 1. 序言 main_outI1()作为主模式主动发起连接请求的核心处理函数,我们可以通过学习该函数的处理流程来探究openswan中报文封装的基本思想.如果之 ...
- bean的作用域和生命周期
一.Bean作用域 二.生命周期 其中,这个类实现各种接口重写各种方法,会按bean的声明周期按序执行: 其中,自定义的初始化和自定义销毁的方法不是实现接口重写,而是成员方法,并且在装配bean即在x ...
- ysoserial CommonsColletions7分析
CC7也是一条比较通用的链了,不过对于其原理的话,其实还是挺复杂的.文章如有错误,敬请大佬们斧正 CC7利用的是hashtable#readObject作为反序列化入口.AbstractMap的equ ...
- 利用k8s yaml配置文件起一个http能够让外部访问
1.首先建一个http的Deployment apiVersion: apps/v1 #版本信息 kind: Deployment #文件类型 metadata: #Deployment资源的元数据信 ...
- vue项目实现文件下载进度条
平时业务中下载文件方式常见的有俩种: 第一种,直接访问服务器的文件地址,自动下载文件: 第二种 ,服务器返回blob文件流,再对文件流进行处理和下载. 一般小文件适用于第一种下载方案,不占用过多服务器 ...
- webpack learn1-webpack-dev-server的配置和使用3
首先输入命令来安装webpack-dev-server npm i webpack-dev-server 在package.json文件中添加代码: "scripts": { &q ...
- dede调用数据时,字符串替换函数使用
{dede:sql sql="SELECT typename,typedir,typeimg FROM #@__arctype where topid=30 limit 0,6"} ...