16路PWM输出的pca9685模块
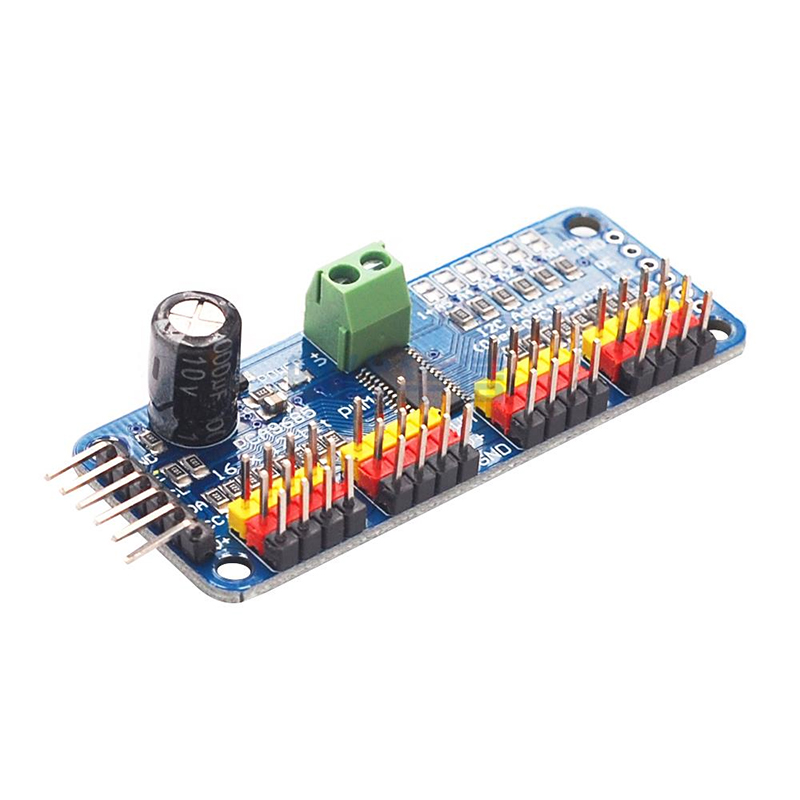
今天要介绍的就是该模块,该模块是16路pwm模块,使用I2C总线可以控制16路舵机(led)。
接线OE空着就可以,其他VCC是芯片供电+5,SCL时钟线,SDA信号线,GND地线。
芯片介绍可以看:https://blog.csdn.net/asmallwhite/article/details/83048091 不过“默认情况下,若将A0-A5全部接地,则其器件地址为:0x40。” 错了,地址是 0x80
51单片机的代码在:http://www.51hei.com/bbs/blog-228471-7372.html (很感谢,放上就跑,很好的代码,但是ACK函数里有个地方有问题 116行“while((sda=1)&&(i<255)) ” 应该改成"while((sda==1)&&(i<255)) "
不修改也能跑通,但是觉得应该这样才对。
再次感谢,代码来自:西瓜太狼 http://www.51hei.com/bbs/blog-228471-7372.html
- /**************************************************************************
- PCA9685模块简单应用
- 平台:89C52,晶振:11.0592
- ***************************************************************************/
- #include"stc89.h"
- #include <intrins.h>
- #include <stdio.h>
- #include <math.h>
- typedef unsigned char uchar;
- typedef unsigned int uint;
- sbit scl=P2^1; //时钟输入线
- sbit sda=P2^0; //数据输入/输出端
- #define PCA9685_adrr 0x80// 1+A5+A4+A3+A2+A1+A0+w/r
- //片选地址,将焊接点置1可改变地址,
- // 当IIC总 呱嫌 多片PCA9685或相同地址时才需焊接
- #define PCA9685_SUBADR1 0x2
- #define PCA9685_SUBADR2 0x3
- #define PCA9685_SUBADR3 0x4
- #define PCA9685_MODE1 0x0
- #define PCA9685_PRESCALE 0xFE
- #define LED0_ON_L 0x6
- #define LED0_ON_H 0x7
- #define LED0_OFF_L 0x8
- #define LED0_OFF_H 0x9
- #define ALLLED_ON_L 0xFA
- #define ALLLED_ON_H 0xFB
- #define ALLLED_OFF_L 0xFC
- #define ALLLED_OFF_H 0xFD
- #define SERVOMIN 90 // this is the 'minimum' pulse length count (out of 4096)
- #define SERVOMAX 700 // this is the 'maximum' pulse length count (out of 4096)
- #define SERVO000 130 //0度对应4096的脉宽计数值
- #define SERVO180 520 //180度对应4096的脉宽计算值,四个值可根据不同舵机修改
- /**********************函数的声明*********************************/
- /*---------------------------------------------------------------
- 毫秒延时函数
- ----------------------------------------------------------------*/
- void delayms(uint z)
- {
- uint x,y;
- for(x=z;x>0;x--)
- for(y=148;y>0;y--);
- }
- /*---------------------------------------------------------------
- IIC总线所需的通用函数
- ----------------------------------------------------------------*/
- /*---------------------------------------------------------------
- 微妙级别延时函数 大于4.7us
- ----------------------------------------------------------------*/
- void delayus()
- {
- _nop_(); //在intrins.h文件里
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- }
- /*---------------------------------------------------------------
- IIC总线初始化函数
- ----------------------------------------------------------------*/
- void init()
- {
- sda=1; //sda scl使用前总是被拉高
- delayus();
- scl=1;
- delayus();
- }
- /*---------------------------------------------------------------
- IIC总线启动信号函数
- ----------------------------------------------------------------*/
- void start()
- {
- sda=1;
- delayus();
- scl=1; //scl拉高时 sda突然来个低电平 就启动了IIC总线
- delayus();
- sda=0;
- delayus();
- scl=0;
- delayus();
- }
- /*---------------------------------------------------------------
- IIC总线停止信号函数
- ----------------------------------------------------------------*/
- void stop()
- {
- sda=0;
- delayus();
- scl=1; //scl拉高时 sda突然来个高电平 就停止了IIC总线
- delayus();
- sda=1;
- delayus();
- }
- /*---------------------------------------------------------------
- IIC总线应答信号函数
- ----------------------------------------------------------------*/
- void ACK()
- {
- uchar i;
- scl=1;
- delayus();
- while((sda==1)&&(i<255)) //原来这里是sda=1这里应该等待从设备拉低总线
- i++;
- scl=0;
- delayus();
- }
- /*---------------------------------------------------------------
- 写一个字节,无返回值,需输入一个字节值
- ----------------------------------------------------------------*/
- void write_byte(uchar byte)
- {
- uchar i,temp;
- temp=byte;
- for(i=0;i<8;i++)
- {
- temp=temp<<1;
- scl=0;
- delayus();
- sda=CY;
- delayus();
- scl=1;
- delayus();
- }
- scl=0;
- delayus();
- sda=1;
- delayus();
- }
- /*---------------------------------------------------------------
- 读一个字节函数,有返回值
- ----------------------------------------------------------------*/
- uchar read_byte()
- {
- uchar i,j,k;
- scl=0;
- delayus();
- sda=1;
- delayus();
- for(i=0;i<8;i++)
- {
- delayus();
- scl=1;
- delayus();
- if(sda==1)
- {
- j=1;
- }
- else j=0;
- k=(k<< 1)|j;
- scl=0;
- }
- delayus();
- return k;
- }
- /*---------------------------------------------------------------
- 有关PCA9685模块的函数
- ----------------------------------------------------------------*/
- /*---------------------------------------------------------------
- 向PCA9685里写地址,数据
- ----------------------------------------------------------------*/
- void PCA9685_write(uchar address,uchar date)
- {
- start();
- write_byte(PCA9685_adrr); //PCA9685的片选地址
- ACK();
- write_byte(address); //写地址控制字节
- ACK();
- write_byte(date); //写数据
- ACK();
- stop();
- }
- /*---------------------------------------------------------------
- 从PCA9685里的地址值中读数据(有返回值)
- ----------------------------------------------------------------*/
- uchar PCA9685_read(uchar address)
- {
- uchar date;
- start();
- write_byte(PCA9685_adrr); //PCA9685的片选地址
- ACK();
- write_byte(address);
- ACK();
- start();
- write_byte(PCA9685_adrr|0x01); //地址的第八位控制数据流方向,就是写或读
- ACK();
- date=read_byte();
- stop();
- return date;
- }
- /*---------------------------------------------------------------
- PCA9685复位
- ----------------------------------------------------------------*/
- void reset(void)
- {
- PCA9685_write(PCA9685_MODE1,0x0);
- }
- void begin(void)
- {
- reset();
- }
- /*---------------------------------------------------------------
- PCA9685修改频率函数
- ----------------------------------------------------------------*/
- void setPWMFreq(float freq)
- {
- uint prescale,oldmode,newmode;
- float prescaleval;
- freq *= 0.92; // Correct for overshoot in the frequency setting
- prescaleval = 25000000;
- prescaleval /= 4096;
- prescaleval /= freq;
- prescaleval -= 1;
- prescale = floor(prescaleval + 0.5);
- oldmode = PCA9685_read(PCA9685_MODE1);
- newmode = (oldmode&0x7F) | 0x10; // sleep
- PCA9685_write(PCA9685_MODE1, newmode); // go to sleep
- PCA9685_write(PCA9685_PRESCALE, prescale); // set the prescaler
- PCA9685_write(PCA9685_MODE1, oldmode);
- delayms(2);
- PCA9685_write(PCA9685_MODE1, oldmode | 0xa1);
- }
- /*---------------------------------------------------------------
- PCA9685修改角度函数
- num:舵机PWM输出引脚0~15,on:PWM上升计数值0~4096,off:PWM下降计数值0~4096
- 一个PWM周期分成4096份,由0开始+1计数,计到on时跳变为高电平,继续计数到off时
- 跳变为低电平,直到计满4096重新开始。所以当on不等于0时可作延时,当on等于0时,
- off/4096的值就是PWM的占空比。
- ----------------------------------------------------------------*/
- void setPWM(uint num, uint on, uint off)
- {
- PCA9685_write(LED0_ON_L+4*num,on);
- PCA9685_write(LED0_ON_H+4*num,on>>8);
- PCA9685_write(LED0_OFF_L+4*num,off);
- PCA9685_write(LED0_OFF_H+4*num,off>>8);
- }
- /*---------------------------------------------------------------
- 主函数
- ----------------------------------------------------------------*/
- void main()
- {
- begin();
- setPWMFreq(50);
- //例如要求舵机转到60度,这么算,
- //60度对应的脉宽=0.5ms+(60/180)*(2.5ms-0.5ms)=1.1666ms
- //利用占空比=1.1666ms/20ms=off/4096,off=239,50hz对应周期20ms
- //setPWM(num,0,239);;;;当然也可以利用SERVO000和SERVO180计算
- while(1)
- {
- setPWM(0, 0, SERVOMIN);//第0路舵机转到最小角度
- setPWM(1, 0, SERVO000);//第1路舵机转到0角度
- setPWM(15, 0, 3000);
- delayms(1500);
- setPWM(0, 0, SERVOMAX);
- // setPWM(1, 0, SERVO180);
- delayms(1500);
- }
- }
16路PWM输出的pca9685模块的更多相关文章
- 4412 4路pwm输出
一.4412 xpwmTOUT1 这是4412的GPD0_1路,itop中被使用为LCD的背光电路的pwm功能.因此如果使用教程中的代码,同样操作GPD0_1是行不通的. 会出现错误,所以需要解除在内 ...
- J20航模遥控器开源项目系列教程(五)| 制作STM32F0接收机,8路PWM输出,SBUS输出,PPM输出 | 加密狗无线化,畅玩飞行模拟器
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/J ...
- STM32 PWM输出(映射)
STM32 的定时器除了 TIM6 和 7.其他的定时器都可以用来产生 PWM 输出.其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出.而通用定时器也能同时产生多达 4 ...
- 定时器同步+触发三ADC采样+输出6路PWM波
为了熟悉定时器定时器和ADC 用STM32F407DIS做了一个简单的工程: 通过高级定时器TIM1溢出更新时间作为触发输出信号(TRGO),触发TIM8开始计数: 同时TIM1的通道1.2.3以及分 ...
- 95-基于FMC接口的2路CameraLink Base输出子卡模块
基于FMC接口的2路CameraLink Base输出子卡模块 1.板卡概述 FMC连接器是一种高速多pin的互连器件,广泛应用于板卡对接的设备中,特别是在xilinx公司的所有开发板中都使用.该Ca ...
- STM32F103ZET6 PWM输出
1.通用定时器的PWM功能 STM32F103ZET6有4个通用定时器,分别是TIM2.TIM3.TIM4.TIM5. 通用定时器由一个可编程预分频器驱动的16位自动装载计数器构成. 通用定时器的很多 ...
- Arduino学习经验(一)之解决舵机库和pwm输出冲突
一.前言 最近在公司学习Arduino uno ,用它实现小车超声波避障功能.实现的功能很简单,就是在小车前方挂一个超声波模块,当碰到障碍物时,会通过舵机进行摆头,判断两边的距离,进行左右转弯.但是碰 ...
- (五)转载:通用定时器PWM输出
1. TIMER输出PWM基本概念 脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有 ...
- TIMER门控模式控制PWM输出长度
TIMER门控模式控制PWM输出长度 参照一些网友代码做了些修改,由TIM4来控制TIM2的PWM输出长度, 采用主从的门控模式,即TIM4输出高时候TIM2使能输出 //TIM2 PWM输出,由TI ...
随机推荐
- 关于ijkplayer下载的demo不能运行,这是因为FFmpeg
前提是你在Mac上已经配置了 homebrew 包管理工具 关于ijkPlayer的demo和framework的使用,也许当直接下载下来不能使用,这时候你需要再你下载的当前目录下运行,你看下自己的目 ...
- java.sql.SQLException: Value '0000-00-00' can not be represented as java.sql.Timestamp
java.sql.SQLException: Value '0000-00-00' can not be represented as java.sql.Timestamp 错误是因为时间类型出现了0 ...
- C# 向程序新建的窗体中添加控件,控件需要先实例化,然后用controls.add添加到新的窗体中去
C# 向程序新建的窗体中添加控件,控件需要先实例化,然后用controls.add添加到新的窗体中去 Form settingForm = new Form(); setForm deviceSet ...
- python ---split()函数讲解
python ---split()函数讲解 split中文翻译为分裂. 在python用于分割字符串使用. split()就是将一个字符串分裂成多个字符串组成的列表. split()可以传入参数,也可 ...
- Linux中彻底删除Google-Chrome浏览器
sudo apt-get autoremove --purge google-chrome-stable 卸载chrome后, 删除-/.config/google-chrome,重新安装.
- 2019-04-26-day041-数据库的索引
内容回顾 多表查询 联表查 内连接 左右两表中能连上的行才被保留 表1 inner join 表2 on 表1.字段1=表2.字段2 外连接 左外连接 表1中所有的项都会被保留,而表2中只有匹配上表1 ...
- Delphi编程之爬取贴吧图片最终版
接着前面两篇文章的内容,我们今天把这个贴吧爬取图片的程序完善,让它具有可以下载贴吧多页和帖子多页图片的能力. 主界面设计如下,包含3个labelededit,3个button,1个memo,1个str ...
- mysql navcate longblob 查询结果导出倒入
由于之前项目为了查询方便,且不受权限控制.所以把image储存在了数据库.但是也遇到了很多瓶颈问题. 1,丢图从日志上查询获知,丢图95%以上是由于mysql的timeout时间失效引起的.(由于另一 ...
- Netty 服务端启动过程
在 Netty 中创建 1 个 NioServerSocketChannel 在指定的端口监听客户端连接,这个过程主要有以下 个步骤: 创建 NioServerSocketChannel 初始化并注 ...
- 前端axios下载excel(二进制)
需求:通过后端接口下载excel文件,后端没有文件地址,返回二进制流文件 实现:axios(ajax类似) 主要代码: axios:设置返回数据格式为blob或者arraybuffer 如: var ...