使用STM32的USART的同步模式Synchronous调戏SPI【usart模拟spi理论】
【原创出品§转载请注明出处】
出处:http://www.cnblogs.com/libra13179/p/7064321.html
什么东西??
我们先来看我们平常看到SPI的时序图(呵呵,要是忘记了可以去我之前写 SPI线协议详解)

现在我们来看看USART的同步模式Synchronous
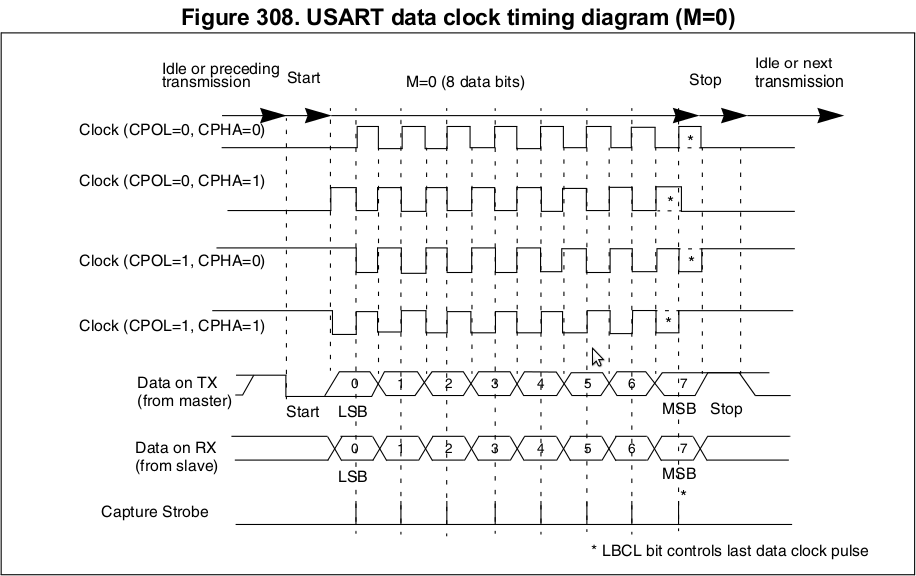
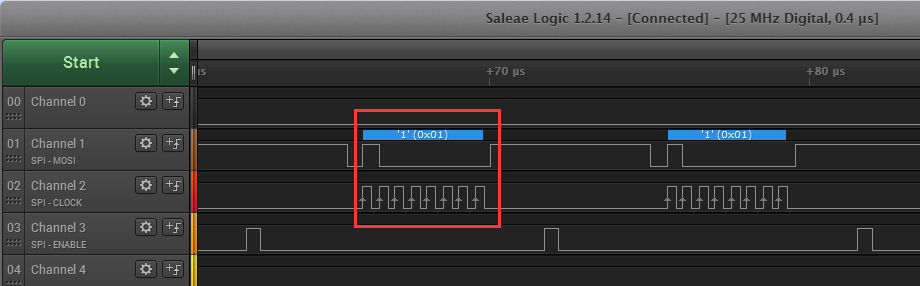
这个是我们使用UASRT的同步模式Synchronous实现的
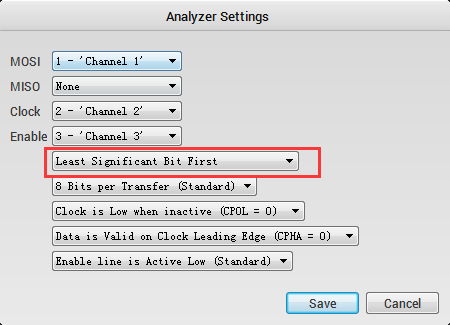
我们的Logic 1.2.14能识别我们的UASRT的同步模式Synchronous而且正确的读取了。

我们看一下真正SPI的通讯时候

好了现在我们现在细细道来。
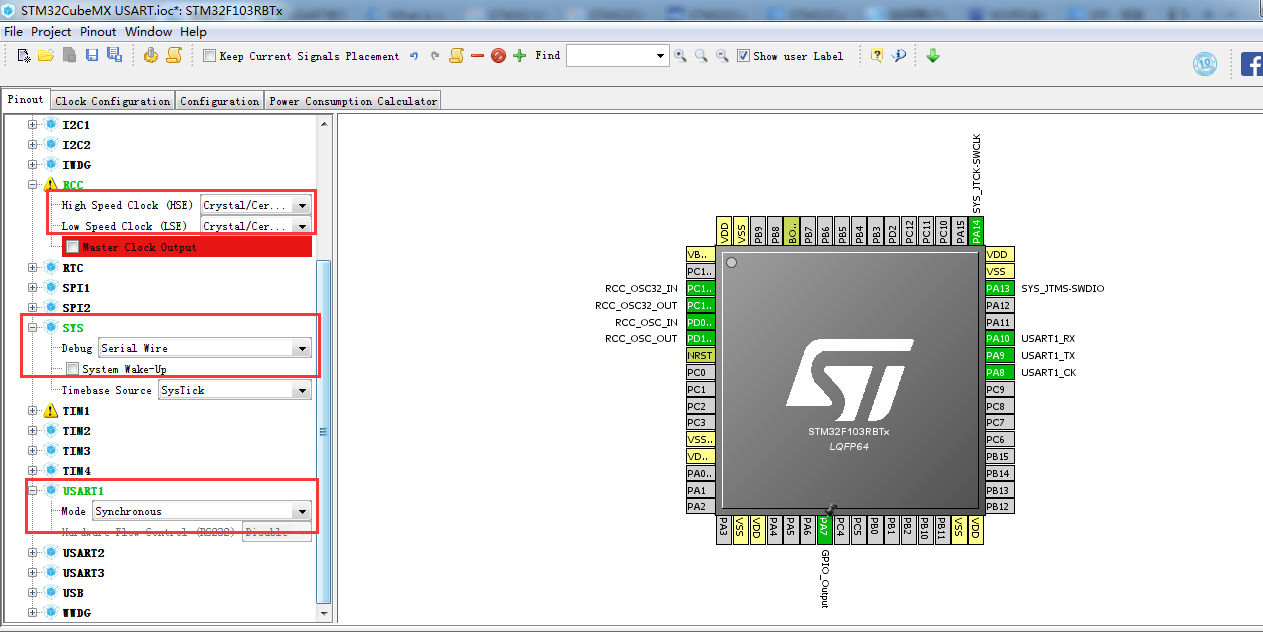
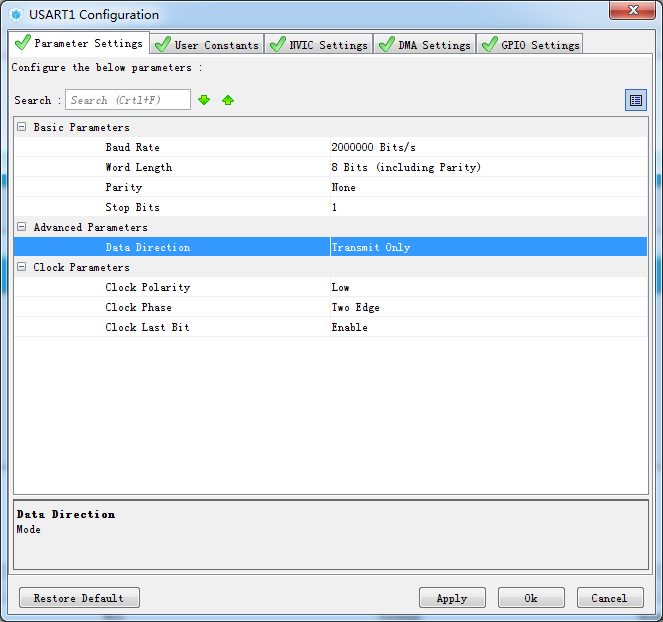
在STM32CubeMX的配置如下

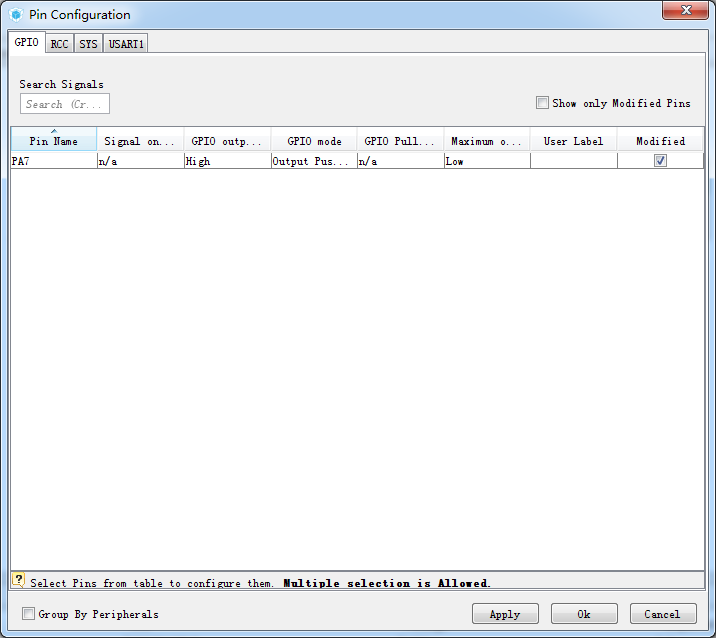
修改一下main中代码
固定输出0x01
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2017 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/
USART_HandleTypeDef husart1; /* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_Init(void); /* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/ /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void)
{ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init(); /* USER CODE BEGIN Init */
uint8_t temp[];
uint8_t i;
/* USER CODE END Init */ /* Configure the system clock */
SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */
/* USER CODE BEGIN WHILE */
while ()
{
/* USER CODE END WHILE */ /* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_USART_Transmit(&husart1, temp, , 0xffff);
temp[]=0x01;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
// HAL_Delay(10); }
/* USER CODE END 3 */ } /** System Clock Configuration
*/
void SystemClock_Config(void)
{ RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct; /**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} /**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} /**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/); /**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, , );
} /* USART1 init function */
static void MX_USART1_Init(void)
{ husart1.Instance = USART1;
husart1.Init.BaudRate = ;
husart1.Init.WordLength = USART_WORDLENGTH_8B;
husart1.Init.StopBits = USART_STOPBITS_1;
husart1.Init.Parity = USART_PARITY_NONE;
husart1.Init.Mode = USART_MODE_TX;
husart1.Init.CLKPolarity = USART_POLARITY_LOW;
husart1.Init.CLKPhase = USART_PHASE_2EDGE;
husart1.Init.CLKLastBit = USART_LASTBIT_ENABLE;
if (HAL_USART_Init(&husart1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} } /** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
static void MX_GPIO_Init(void)
{ GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET); /*Configure GPIO pin : PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while()
{
}
/* USER CODE END Error_Handler_Debug */
} #ifdef USE_FULL_ASSERT /**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */ } #endif /**
* @}
*/ /**
* @}
*/ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
显示波形
输出从0x00到0xff
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2017 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/
USART_HandleTypeDef husart1; /* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_Init(void); /* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/ /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void)
{ /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init(); /* USER CODE BEGIN Init */
uint8_t temp[];
uint8_t i;
/* USER CODE END Init */ /* Configure the system clock */
SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */
/* USER CODE BEGIN WHILE */
while ()
{
/* USER CODE END WHILE */ /* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_USART_Transmit(&husart1, temp, , 0xffff);
temp[]=i++;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
// HAL_Delay(10); }
/* USER CODE END 3 */ } /** System Clock Configuration
*/
void SystemClock_Config(void)
{ RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct; /**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} /**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} /**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/); /**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, , );
} /* USART1 init function */
static void MX_USART1_Init(void)
{ husart1.Instance = USART1;
husart1.Init.BaudRate = ;
husart1.Init.WordLength = USART_WORDLENGTH_8B;
husart1.Init.StopBits = USART_STOPBITS_1;
husart1.Init.Parity = USART_PARITY_NONE;
husart1.Init.Mode = USART_MODE_TX;
husart1.Init.CLKPolarity = USART_POLARITY_LOW;
husart1.Init.CLKPhase = USART_PHASE_2EDGE;
husart1.Init.CLKLastBit = USART_LASTBIT_ENABLE;
if (HAL_USART_Init(&husart1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
} } /** Configure pins as
* Analog
* Input
* Output
* EVENT_OUT
* EXTI
*/
static void MX_GPIO_Init(void)
{ GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET); /*Configure GPIO pin : PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while()
{
}
/* USER CODE END Error_Handler_Debug */
} #ifdef USE_FULL_ASSERT /**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */ } #endif /**
* @}
*/ /**
* @}
*/ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
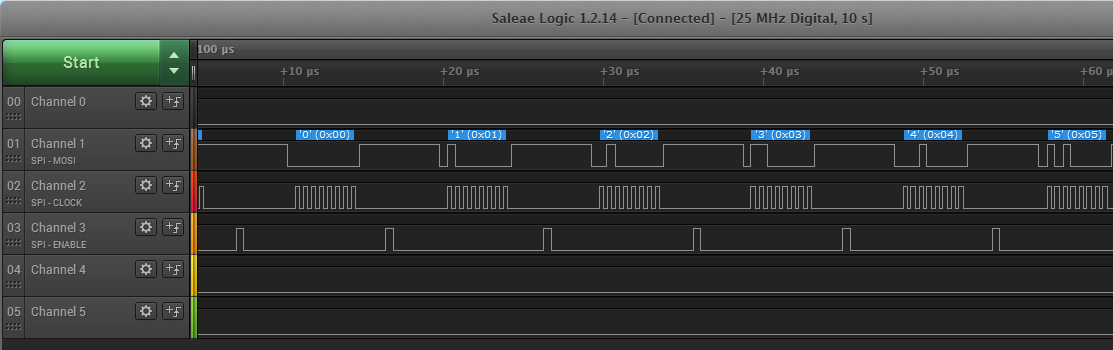
好了现在需要说明的是usart的固定是LSB,所以要想发送MSB只能预先进行转化。
使用STM32的USART的同步模式Synchronous调戏SPI【usart模拟spi理论】的更多相关文章
- 使用STM32的USART的同步模式Synchronous调戏SPI[2] 【实现spi 9bit】
[原创出品§转载请注明出处] 出处:http://www.cnblogs.com/libra13179/p/7064533.html 上回说道使用USART的来模拟SPI通讯.说说一下我什么写这个的原 ...
- CDC不同模式在ODI中体现系列之一 同步模式
CDC不同模式在ODI中体现系列之一 同步模式 Oracle Database Change Data Capture feature 变化数据捕获是一个通称,是用来描述捕捉增量变化应用到数据存储.随 ...
- SQL Server AlwaysON 同步模式的疑似陷阱
原文:SQL Server AlwaysON 同步模式的疑似陷阱 SQL Server 2012 推出的最重要的功能之一Alwayson,是一个集之前Cluster和Mirror于一体的新功能,即解决 ...
- 驰骋工作流引擎JFlow与activiti的对比之4种高级分支同步模式
多重选择(Multiple Choice) 在流程中,当一个活动完成后,有多个分支进行选择,可以选择执行其中的一个或者N个分支. 例子:比如去世博园玩,在门口检票后,可以选择A-E个片区中的N个进行观 ...
- stm32定时器时钟以及中间对齐模式
在永磁同步电机的控制中,需要对电机的三相定子施加一定的电压,才能控制电机转动.现在用的较多的是SVPWM(SVPWM的具体原理会在后面另写一篇博客说明),要想产生SVPWM波形,需要控制的三相电压呈如 ...
- Singer 学习十 同步模式
sync 模式是属于tap 的操作,同步模式下,tap 需要提交 schema. record .state message, singer 指南对于每种 类型有详细的说明 streams 每个str ...
- Linux下同步模式、异步模式、阻塞调用、非阻塞调用总结
转自:http://www.360doc.com/content/13/0117/12/5073814_260691714.shtml 同步和异步:与消息的通知机制有关. 本质区别 现实例子 同步模式 ...
- STM32 ADC多通道转换DMA模式与非DMA模式两种方法(HAL库)
一.非DMA模式(转) 说明:这个是自己刚做的时候百度出来的,不是我自己做出来的,因为感觉有用就保存下来做学习用,原文链接:https://blog.csdn.net/qq_24815615/arti ...
- Swoole协程与传统fpm同步模式比较
如果说数组是 PHP 的精髓,数组玩得不6的,根本不能算是会用PHP.那协程对于 Swoole 也是同理,不理解协程去用 Swoole,那就是在瞎用. 首先,Swoole 只能运行在命令行(Cli)模 ...
随机推荐
- jquery add() 和js add()
HTML DOM add() 方法 HTML DOM Select 对象 定义和用法 add() 方法用于向 <select> 添加一个 <option> 元素. 语法 sel ...
- WAL基础
WAL(Write-ahead logging,预写式日志)是数据库系统提供原子性和持久化的一系列技术. 在使用WAL的系统中,所有的修改都先被写入到日志中,然后再被应用到系统状态中.通常包含redo ...
- CentOS 7安装Oracle 11gR2以及设置自启动(1)
一.环境准备 1.正确无误的CentOS 7系统环境 虚拟机要求: 内存至少2G 处理器至少2个 根分区要大于20G(安装oracle很占空间,空闲空间要足够) 2.正确的JDK环境 CentOS 7 ...
- centos7+apache+svn配置 踩坑,注意权限问题。apache应用目录checkout应用 必须用这个命令:svn co file:///home/svn/test/ test ,通过svn add * &&commit 及任意修改都是不行的
阅读帮助 命令提示符 [root@server-002 ~]# 表示当前服务root用户执行的命令 [svn@server-002 ~]$ 表示普通用户svn执行的命令 [root@localhost ...
- Hash算法原理的简单分析
哈希计算就是努力的把比较大的数据存放到相对较小的空间中.最常见的哈希算法是取模法.下面简单讲讲取模法的计算过程.比如:数组的长度是5.这时有一个数据是6.那么如何把这个6存放到长度只有5的数组中呢.按 ...
- Python基础知识(五)
# -*- coding: utf-8 -*-# @Time : 2018-12-25 19:31# @Author : 三斤春药# @Email : zhou_wanchun@qq.com# @Fi ...
- 使用fakeroot模拟root权限执行程序(转)
Hack #57: 使用fakeroot模拟root权限执行程序 fakeroot是什么 例如Debian在生成package的时候,编译完之后,不能立刻在当前环境执行make install,需要执 ...
- 第9章 应用层(3)_telnet协议和远程桌面协议RDP
3.1 telnet简介 (1)telnet是一个简单的远程终端协议,也是因特网的正式标准.用户使用telnet连接到远程运行telnet服务的设备(可以是网络设备.比如路由器.交换机,也可以是操作系 ...
- 第9章 应用层(2)_动态主机配置协议(DHCP)
2. 动态主机配置协议(DHCP) 2.1 静态地址和动态地址的应用场景 (1)静态地址应用场景 ①IP地址不经常更改的设备(如服务器地址) ②使用有规律的IP地址以便于管理(如学校机房为方便教师管理 ...
- lesson
需要深入研究:1.pinctrl子系统2.gpio子系统3.dtsi的处理架构4.printk的log级别和log机制5.中断子系统6.console是什么?log来自哪里?7.kernel命令行参数 ...