激光SLAM
1、激光分类
维度分类:
a、二维激光(单点反射、平面、旋转台)
b、三维激光
距离分类:
a、近距离:壁障、碰撞检测、路边检测
b、远距离:行人检测、定位、建图
特点:
优点:
a、可以直接获取深度信息;
b、不受环境光照影响,比较稳定;
缺点:
a、稀疏性;
b、几何信息区分度小;
SLAM研究历史
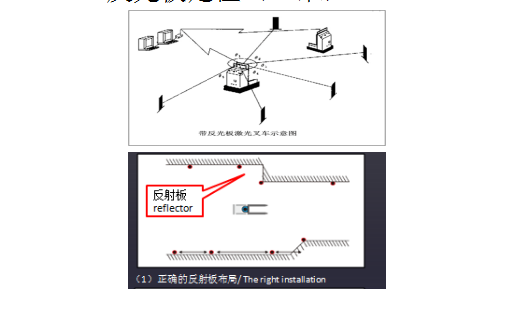
1、反光板定位(二维)
2、ekf特征定位(二维) 主要形式为角点、线。 一般要配以里程计、imu,或者运动模型来提供运动预测 算法以ekf、粒子滤波等模型形式。
http://blog.csdn.net/renshengrumenglibing/article/details/8604245
3、点或特征的ICP(二维) 里程计推导用直接的ICP替代了之前的efk过程。 定位使用粒子滤波方式。 最有代表性的是gmapping
4、技巧 1.去除信息量较少的点、例如分割去除地面、动态物体等 2.只提取一些关注信息,例如路牙 3.多种方法融合,ndt和特征、激光和相机等。 4.往二维方法上靠,二维网格、二维配准方法等。 5.隐性的借鉴十年前的有效方法 6.更强调工程型,例如行人检测等内容 7.闭环检测很多情况下不需要、不现实。(A Flexible and Scalable SLAM System with Full3D Motion Estimation)。
LOAM
激光SLAM的更多相关文章
- 激光SLAM Vs 视觉SLAM
博客转载自:https://www.leiphone.com/news/201707/ETupJVkOYdNkuLpz.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 激光SLAM与视觉SLAM的特点
激光SLAM与视觉SLAM的特点 目前,SLAM技术被广泛运用于机器人.无人机.无人驾驶.AR.VR等领域,依靠传感器可实现机器的自主定位.建图.路径规划等功能.由于传感器不同,SLAM的实现方式也有 ...
- 2D激光SLAM算法比较+cartographer
Hector slam: Hector slam利用高斯牛顿方法解决scan-matching问题,对传感器要求较高. 缺点:需要雷达(LRS)的更新频率较高,测量噪声小.所以在制图过程中,需要rob ...
- 主流视觉SLAM、激光SLAM总结
SLAM预备知识 SLAM for Dummies 全文总结 视觉里程计 卡尔曼滤波推导 MonoSLAM MonoSLAM:Real-Time Single Camera SLAM全文总结 PTAM ...
- SLAM学习笔记(2)SLAM算法
SLAM算法分为三类:Kalman滤波.概率滤波.图优化 Kalman滤波方法包括EKF.EIF:概率滤波包括RBPF,FastSLAM是RBPF滤波器最为成功的实例, 也是应用最为广泛的SLAM方法 ...
- 视觉slam学习之路(一)看高翔十四讲所遇到的问题
目前实验室做机器人,主要分三个方向,定位导航,建图,图像识别,之前做的也是做了下Qt上位机,后面又弄红外识别,因为这学期上课也没怎么花时间在项目,然后导师让我们确定一个方向来,便于以后发论文什么. ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
随机推荐
- 斯坦福公开课:Developing IOS 8 App with Swift(1-3)心得体会
最近开始学习Swift开发移动程序.跟随斯坦福大学的公开课进行自学. 这真是一个美好的时代,虽然不能在斯坦福求学,但是可以观看录制的授课录像.讲义,好似老师在给我们上课一样! 心得: 1.每节课信息量 ...
- kubernetes对象之Volume
系列目录 概述 Volume是对各种存储资源的抽象.虚拟化.为管理.控制.使用存储资源提供统一接口.Openstack中的volume为虚拟机提供存储,Docker中的volume为容器提供存储.因为 ...
- bvlc_reference_caffenet.caffemodel
#uncoding:utf-8 # set up Python environment: numpy for numerical routines, and matplotlib for plotti ...
- (转)MongoDB在mongo控制台下的基本使用命令
成功启动MongoDB后,再打开一个命令行窗口输入mongo,就可以进行数据库的一些操作. 输入help可以看到基本操作命令: show dbs:显示数据库列表 show collections:显示 ...
- 【BZOJ1014】[JSOI2008]火星人prefix Splay+hash
[BZOJ1014][JSOI2008]火星人prefix Description 火星人最近研究了一种操作:求一个字串两个后缀的公共前缀.比方说,有这样一个字符串:madamimadam,我们将这个 ...
- Win10升级.NET Framework 3.5或2.0遇到错误0x800f081f
具体方法如下: 1.将WIN10安装光盘ISO文件加载到虚拟光驱中. 2.WIN键+R键一起按,输入CMD后回车. 3.在CMD的命令行窗口里输入: cd C:Windowssystem32 跳转到s ...
- Create a /etc/yum.repos.d/mongodb-org-4.0.repo
Install MongoDB Community Edition on Red Hat Enterprise or CentOS Linux — MongoDB Manual https://doc ...
- kong
https://docs.konghq.com/install/centos/ wget https://bintray.com/kong/kong-community-edition-rpm/dow ...
- React深入源码--了解Redux用法之Provider
在Redux中最核心的自然是组件,以及组件相关的事件与数据流方式.但是我们在Redux中并没有采用传统的方式在getInitialState()中去初始化数据,而是采用Provider统一处理,省去了 ...
- [SCOI2009] 最长距离
题目描述 windy有一块矩形土地,被分为 NM 块 11 的小格子. 有的格子含有障碍物. 如果从格子A可以走到格子B,那么两个格子的距离就为两个格子中心的欧几里德距离. 如果从格子A不可以走到格子 ...