定时器TIM,pwm
一、定时器
1. 定义
设置等待时间,到达后则执行指定操作的硬件。
2. STM32F407的定时器有以下特征
具有基本的定时功能,也有PWM输出(灯光控制、电机的转速)、脉冲捕获功能(红外捕捉)。
2个高级控制定时器、10个通用定时器和2个基本定时器
高级控制定时器(TIM1和TIM8)
具有16位定时器功能,也具有PWM输出高级控制功能
通用定时器(TIM2到TIM5)
具有16位定时功能,也具有PWM输出控制功能
通用定时器(TIM9到TIM14)
具有16位定时功能,也具有PWM输出控制功能
基本定时器(TIM6和TIM7)
具有16位定时功能
二、定时器初始化
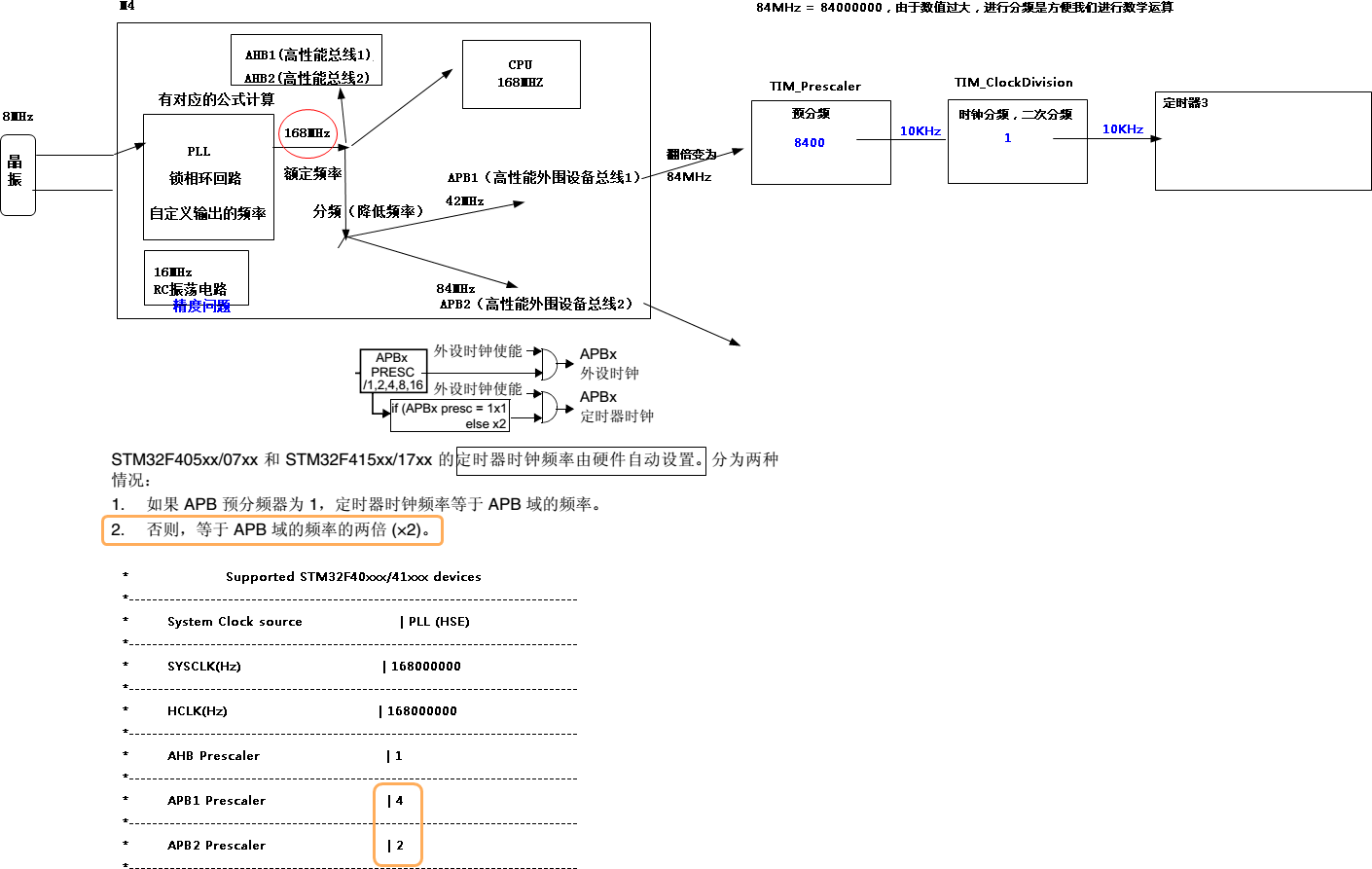
1. 选择时钟源,并初始化定时器分频值与定时时间
/* TIM3 clock enable ,定时器3时钟使能*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); /* Time base configuration ,定时器基本配置*/
TIM_TimeBaseStructure.TIM_Period = (/)-; //定时时间的设置[非常重要],中断频率为1000Hz,也就是定时时间为1ms
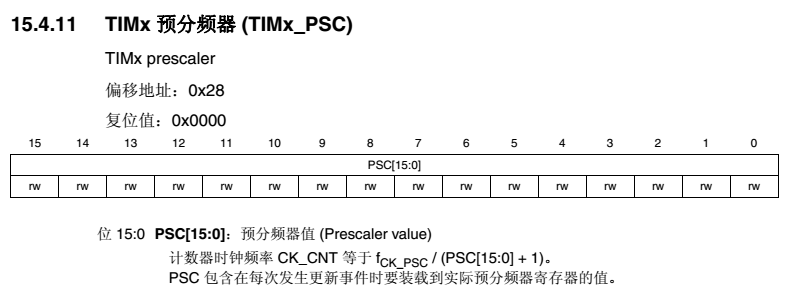
TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,也称之为二次分频,当前是1分频,说白了不分频,不降低频率
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数的方法
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化
涉及部分寄存器参考如下

1. 中断的配置
/* TIM Interrupts enable,使能定时器3更新中断事件,也代表说定时已经到达的事件 */
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); /* TIM3 enable counter,使能定时器3工作 */
TIM_Cmd(TIM3, ENABLE);
2. 中断服务函数的编写
void TIM3_IRQHandler(void)
{
static uint32_t cnt=; //是否已经有更新中断事件
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET)
{
//添加用户代码
cnt++; if(cnt>=)
{
cnt =;
PFout()^=; }
//清空标志位,告诉CPU我已经完成中断处理
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
} }
TIM3
#include <stdio.h>
#include "stm32f4xx.h"
#include "sys.h" GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure; void tim3_init(void)
{
/* TIM3 clock enable ,定时器3时钟使能*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); /* Enable the TIM3 gloabal Interrupt ,使能定时器3全局中断*/
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); /* Time base configuration ,定时器基本配置*/
TIM_TimeBaseStructure.TIM_Period = (/)-; //定时时间的设置[非常重要],中断频率为1000Hz,也就是定时时间为1ms
TIM_TimeBaseStructure.TIM_Prescaler = -; //预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,也称之为二次分频,当前是1分频,说白了不分频,不降低频率
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数的方法
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //初始化 /* TIM Interrupts enable,使能定时器3更新中断事件,也代表说定时已经到达的事件 */
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); /* TIM3 enable counter,使能定时器3工作 */
TIM_Cmd(TIM3, ENABLE); } int main(void)
{ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); /* 配置PF9引脚为输出模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //第9根引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //设置输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽模式,增加驱动电流
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //设置IO的速度为100MHz,频率越高性能越好,频率越低,功耗越低
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //不需要上拉电阻
GPIO_Init(GPIOF, &GPIO_InitStructure); PFout()=; //定时器3初始化
tim3_init(); while()
{ } } void TIM3_IRQHandler(void)
{
static uint32_t cnt=; //是否已经有更新中断事件
if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET)
{
//添加用户代码
cnt++; if(cnt>=)
{
cnt =; PFout()^=; } //清空标志位,告诉CPU我已经完成中断处理
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
} }
tim1238_irq
#include "stm32f4xx.h"
#include "stdio.h"
#include "bitband.h" GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; void tim1_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_TIM10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //定时时间为100ms 168000000/16800=10000Hz
TIM_TimeBaseStructure.TIM_Period = (/)-;
TIM_TimeBaseStructure.TIM_Prescaler = -;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE); TIM_Cmd(TIM1, ENABLE); } void tim2_init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //定时时间为200ms 84000000/84000=10000Hz
TIM_TimeBaseStructure.TIM_Period = (/)-;
TIM_TimeBaseStructure.TIM_Prescaler = -;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); TIM_Cmd(TIM2, ENABLE); } void tim3_init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //定时时间为500ms 84000000/84000=10000Hz
TIM_TimeBaseStructure.TIM_Period = (/)-;
TIM_TimeBaseStructure.TIM_Prescaler = -;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); TIM_Cmd(TIM3, ENABLE); } void tim8_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = TIM8_UP_TIM13_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //定时时间为2秒 168000000/168000=10000Hz
TIM_TimeBaseStructure.TIM_Period = (*)-;
TIM_TimeBaseStructure.TIM_Prescaler = -;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE); TIM_Cmd(TIM8, ENABLE); } int main(void)
{ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF | RCC_AHB1Periph_GPIOE, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOE, &GPIO_InitStructure); PFout() = ;
PFout() = ;
PEout() = ;
PEout() = ; tim1_init();
tim2_init();
tim3_init();
tim8_init(); while()
{ }
} void TIM1_UP_TIM10_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
{ PFout() ^= ; TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
} void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{ PFout() ^= ; TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
} void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{ PEout() ^= ; TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
} void TIM8_UP_TIM13_IRQHandler(void)
{
if (TIM_GetITStatus(TIM8, TIM_IT_Update) != RESET)
{ PEout() ^= ; TIM_ClearITPendingBit(TIM8, TIM_IT_Update);
}
}
定时器TIM,pwm的更多相关文章
- 关于普通定时器与高级定时器的 PWM输出的初始化的区别
不管是普通定时器还是高级定时器,你用哪个通道,就在程序里用OC多少.比如CH3对应OC3 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_ ...
- STM32F103定时器输出PWM波控制直流电机
这个暑假没有回家,在学校准备九月份的电子设计竞赛.今天想给大家分享一下STM32高级定时器输出PWM波驱动直流电机的问题.. 要想用定时器输出的PWM控制直流电机,,首先要理解“通道”的概念..一个定 ...
- STM32定时器输出PWM频率和步进电机控制速度计算
1.STM32F4系列定时器输出PWM频率计算 第一步,了解定时器的时钟多少: 我们知道AHP总线是168Mhz的频率,而APB1和APB2都是挂在AHP总线上的. (1)高级定时器timer1, t ...
- STM32 基于定时器的PWM发生器
脉冲宽度调制(PWM),是英文"Pulse Width Modulation" 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术.简单一点,就 ...
- 定时器及PWM
1 定时器 1.1 定时器分类 对于STM32来说,定时器可分为基本定时器.通用定时器.高级定时器三类,后者包括前者的全部功能.以stm32f1系列为例,TIM6和TIM7为基本定时器,TIM2~TI ...
- stm32cube--通用定时器--产生pwm波
看了通用定时器的资料,发现内容挺多,挺难看懂,现在还是先掌握使用方法,以后再多看几遍吧. ① ② ③生成mdk工程后,在main.c的while(1)前面加上HAL_TIM_PWM_Start(&am ...
- stm32之通用定时器TIM
STM32系列的CPU,有多达8个定时器: 1.其中TMI1和TIM8是能够产生三对PWM互补输出的高级定时器,常用于三相电机的驱动:它们的时钟有APB2的输出产生: 2.其它6个为普通定时器,时钟由 ...
- stm32 定时器TIM时钟步骤
1)TIM3 时钟使能 . RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIMx, ENABLE); //时钟使能 2) 初始化定时器参数,设置自动重装值, 分频系数, ...
- STM32 HAL库学习系列第6篇---定时器TIM 级联配置
应用情景 使用定时器配置编码器模式,发现STM32只有两个定时器是32位,16位的测量值不够用,发现是可以使用两个16位定时器级联为32位的. 我是在使用编码器计数电机转速时使用,但是最终实现的效果不 ...
随机推荐
- ndarray笔记
Numpy的介绍 1. Ndarray:N-dimensional array, N维数组 2. 一种由相同类型的元素组成的多维数组,元素数量是事先指定好的 例:建立Ndarray多维数组 nd ...
- Spring (3)框架
Spring第三天笔记 今日内容 Spring的核心之一 - AOP思想 (1) 代理模式- 动态代理 ① JDK的动态代理 (Java官方) ② CGLIB 第三方代理 (2) AOP思想在Spr ...
- Docker系列5--一些问题及解决
1. 存储问题 1.1 挂载目录权限问题 在使用swarm创建服务的时候要挂载存储来获取运行文件,及写日志出去. 可运行文件相当于在集群中所有地方应该都能访问到,所以使用了NFS文件系统,在集群中所有 ...
- (十一)web服务与javaweb结合(2)
一.解决问题及解决方法 解决问题:上章节用监听器的方式是有缺陷的:web服务的端口和web工程的端口不能一致. 解决方案:将webService绑定到web工程中,使得共用一个端口. 二.案例 2.1 ...
- C#工厂模式案例
class JianDanGongChang { static void Main(string[] args) { Factory factory=new LianXiangFactory(); D ...
- php 环境搭建问题
项目过程中需要用到 PHP环境 https://www.cnblogs.com/cyrfr/p/6483529.html APACHE无法启动:THE REQUEST OPERATION HAS FA ...
- Go part 1 初探
Go 语言简介 Go 语言是 Google 在2007年开发的一种开源编程语言,于2009年11月10日向全球公布 出自 Ken Thompson 和 Rob Pike.Robert Grieseme ...
- JS实现数组去重(重复元素保留一个)
1.遍历数组法 它是最简单的数组去重方法(indexOf方法) 实现思路:新建一个数组,遍历去要重的数组,当值不在新数组的时候(indexOf为-1)就加入该新数组中: var arr=[2,8,5, ...
- crunch离线密码生成
Crunch是一种创建密码字典工具,按照指定的规则生成密码字典,可以灵活的制定自己的字典文件. 一.Crunch为kali自带工具之一在kali环境下进行,默认基于26个小写英文字母. 语法:cru ...
- Django hrf:权限、频率控制
一.权限 二.频率控制 一.权限 1.权限介绍 只有超级用户才能访问指定的数据,所以就要用权限组件进行设置 2.局部使用 # 单独抽出写一个视图类 from rest_framework.permis ...