Pangolin库的使用
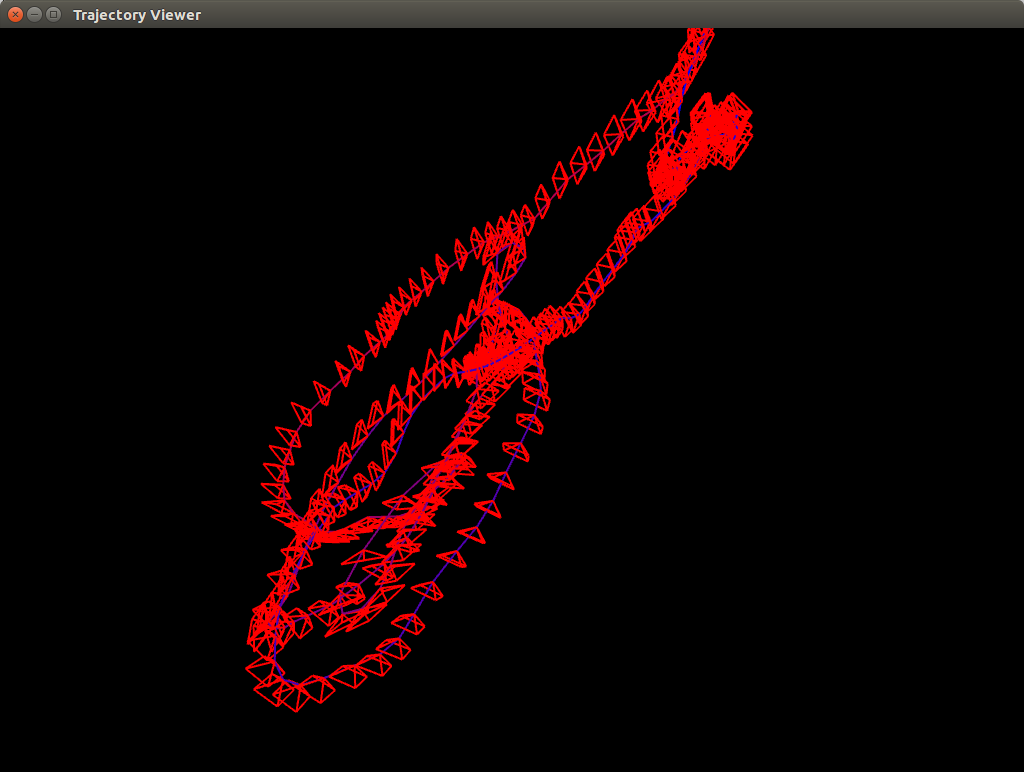
使用Pangolin画出相机的轨迹(包括朝向)。
数据集结构data.csv:
#timestamp, p_RS_R_x [m], p_RS_R_y [m], p_RS_R_z [m], q_RS_w [], q_RS_x [], q_RS_y [], q_RS_z [], v_RS_R_x [m s^-1], v_RS_R_y [m s^-1], v_RS_R_z [m s^-1], b_w_RS_S_x [rad s^-1], b_w_RS_S_y [rad s^-1], b_w_RS_S_z [rad s^-1], b_a_RS_S_x [m s^-2], b_a_RS_S_y [m s^-2], b_a_RS_S_z [m s^-2]
1403636580838555648,4.688319,-1.786938,0.783338,0.534108,-0.153029,-0.827383,-0.082152,-0.027876,0.033207,0.800006,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580843555328,4.688177,-1.786770,0.787350,0.534640,-0.152990,-0.826976,-0.082863,-0.029272,0.033992,0.804771,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580848555520,4.688028,-1.786598,0.791382,0.535178,-0.152945,-0.826562,-0.083605,-0.030043,0.034999,0.808240,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580853555456,4.687878,-1.786421,0.795429,0.535715,-0.152884,-0.826146,-0.084391,-0.030230,0.035853,0.810462,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580858555648,4.687727,-1.786240,0.799484,0.536244,-0.152821,-0.825731,-0.085213,-0.029905,0.036316,0.811406,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580863555328,4.687579,-1.786059,0.803540,0.536768,-0.152768,-0.825314,-0.086049,-0.029255,0.036089,0.811225,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580868555520,4.687435,-1.785881,0.807594,0.537289,-0.152725,-0.824896,-0.086890,-0.028469,0.035167,0.810357,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580873555456,4.687295,-1.785709,0.811642,0.537804,-0.152680,-0.824481,-0.087725,-0.027620,0.033777,0.808910,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
1403636580878555648,4.687158,-1.785544,0.815682,0.538317,-0.152627,-0.824067,-0.088553,-0.026953,0.031990,0.806951,-0.003172,0.021267,0.078502,-0.025266,0.136696,0.075593
前八项分别为 时间戳,x,y,z,$q_0,q_1,q_2,q_3$。
#include <iostream>
#include <pangolin/pangolin.h>
#include <Eigen/Core>
#include <sophus/se3.h>
using namespace std; typedef vector<Sophus::SE3, Eigen::aligned_allocator<Sophus::SE3>> VecSE3;
typedef vector<Eigen::Vector3d, Eigen::aligned_allocator<Eigen::Vector3d>> VecVec3d; string file = "./data.csv"; void Draw(const VecSE3 &poses);
int main(int argc, char **argv)
{
//读位姿
VecSE3 poses;
VecVec3d points;
ifstream fin(file);//位姿 string lineStr;
int j = ;
while(getline(fin,lineStr))//每行
{
j+=;//隔100个点取一个数据
if (j% != )
continue; //cout<<lineStr <<endl;
stringstream ss(lineStr);
string str;
double data[];
int i = ;
while (getline(ss, str, ','))
{
stringstream intg(str);
if (i >= )//只取前八个
continue;
intg >> data[i];
i+=;
}
poses.push_back(Sophus::SE3(
//eigen.tuxfamily.org/dox-devel/classEigen_1_1Quaternion.html
Eigen::Quaterniond(data[], data[], data[], data[]),//四元数
Eigen::Vector3d(data[], data[], data[])//位移
));
//cout << data[1] <<" "<< data[2]<<" "<< data[3]<<" "<< data[4]<<endl;//位移
if (!fin.good()) break; }
fin.close(); Draw(poses);
return ; } void Draw(const VecSE3 &poses)
{
if (poses.empty() )
{
cerr << "parameter is empty!" << endl;
return;
}
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", , );
glEnable(GL_DEPTH_TEST);//深度测试
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(//摆放一个相机
pangolin::ProjectionMatrix(, , , , , , 0.1, ),
pangolin::ModelViewLookAt(, -0.1, -1.8, , , , 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()//创建一个窗口
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam)); while (pangolin::ShouldQuit() == false)
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);//消除颜色缓冲
d_cam.Activate(s_cam); glClearColor(0.0f, 0.0f, 0.0f, 0.0f);
// draw poses
//画相机朝向
for (auto &Twc: poses)//从poses中取位姿
{
glPushMatrix();
Sophus::Matrix4f m = Twc.matrix().cast<float>();
glMultMatrixf((GLfloat *) m.data()); const float w = 0.25;
const float h = w*0.75;
const float z = w*0.6;
glColor3f(, , );
glLineWidth();
glBegin(GL_LINES);
//画相机模型
glVertex3f(, , );
glVertex3f(w,h,z);
glVertex3f(, , );
glVertex3f(w,-h,z);
glVertex3f(, , );
glVertex3f(-w,-h,z);
glVertex3f(, , );
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(-w,h,z);
glVertex3f(w,h,z);
glVertex3f(-w,-h,z);
glVertex3f(w,-h,z); glEnd();
glPopMatrix();
}
//画轨迹
glLineWidth();
for (size_t i = ; i < poses.size() - ; i++)
{
glColor3f( - (float) i / poses.size(), 0.0f, (float) i / poses.size());
glBegin(GL_LINES);
auto p1 = poses[i], p2 = poses[i + ];
glVertex3d(p1.translation()[], p1.translation()[], p1.translation()[]);
glVertex3d(p2.translation()[], p2.translation()[], p2.translation()[]);
}
glEnd();
pangolin::FinishFrame();
usleep(); // sleep 5 ms
}
}
CMakeLists.txt
cmake_minimum_required( VERSION 2.8 )
project( show ) set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" ) list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules ) # 寻找G2O Cholmod eigen3
find_package( G2O REQUIRED )
find_package( Cholmod )
include_directories(
${G2O_INCLUDE_DIRS} ${CHOLMOD_INCLUDE_DIR}
"/usr/include/eigen3"
) # sophus
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} ) find_package( Pangolin REQUIRED)
include_directories( ${Pangolin_INCLUDE_DIRS} ) add_executable( draw draw.cpp ) target_link_libraries( draw
${CHOLMOD_LIBRARIES}
${Sophus_LIBRARIES}
${Pangolin_LIBRARIES}
)
除此之外,还需添加cmake_modules。
运行结果:
Pangolin库的使用的更多相关文章
- 使用pangolin库画出轨迹
https://github.com/stevenlovegrove/Pangolin cmake_minimum_required(VERSION 2.8) project(chapter3) ) ...
- Pangolin的使用
Pangolin 是一个可用于SLAM可视化的openGL库.目前有很多SLAM系统都用它作为可视化的工具.它的编译与安装过程问题不大,依赖也比较少.但最近我在单独使用它的时候,碰到了很奇怪的现象:我 ...
- error: No rule to make target '/usr/lib/libOpenNI.so', needed by 'bin/euroc_rectify'。 停止。
这类问题的出现说明程序在编译时,CMakeLists.txt 文件没有找到OpenNI.so, 即 Pangolin库未安装或破损. 重新安装pangolin库即可.(亲测)
- Ubuntu下安装与卸载opencv模块
opencv安装 因工程需要,想在python中调用opencv import cv2 现在记录一下如何在Linux系统(ubutun)下安装该模块: 参考了一篇博客:http://blog.csdn ...
- CMake命令之export
CMake中与export()相关的命令 (注:红色字体是标题,粉色是需要特别需要注意的地方) 总的来说,export()命令想要做的事情可以用一句话概括:Export targets from th ...
- 第三方库的安装:Pangolin
Pangolin: 一款开源的OPENGL显示库,可以用来视频显示.而且开发容易. 代码我们可以从Github 进行下载:https://github.com/stevenlovegrove/Pang ...
- ORB_SLAM2之Pangolin的安装与问题处理
前言 本篇博客中,我们主要介绍了在安装ORB_SLAM2所需的第三方库Pangolin的过程中遇到的一些问题及解决方法. 1.Pangolin是什么? Pangolin是一个用于OpenGL显示/交互 ...
- ubuontu16.04安装Opencv库引发的find_package()错误信息处理及其简单使用
在安装完Opencv库之后,打算测试一下Opencv库是否成功安装.下面是用的例子对应的.cpp代码以及对应的CMakeLists.txt代码: .cpp文件: #include <stdio. ...
- 安装Pangolin
Pangolin是一个用于OpenGL显示/交互以及视频输出的一个轻量级 快速开发库 一:安装必要的库 1.Glew sudo apt-get install libglew-dev 2.Cmake ...
随机推荐
- Defer 声明的设计理念
[Defer 声明的设计理念] A defer statement pushes a function call onto a list. The list of saved calls is exe ...
- 在Ubuntu18.04的Docker中安装Oracle镜像及简单使用
一.软件环境: 1.OS:Ubuntu 18.04 2.已安装了Docker 二.安装Oracle镜像的过程 1.切换到root账号下,如果是普通账号,下面操作指令前面加sudo 2.搜索oracle ...
- gd库已打开,验证码不显示
ob_start(); ob_clean();
- oracle 建立表空间和用户
.建立表空间, create tablespace "NETHRA" DATAFILE 'D:\DataBase\Oracle\iClass\iclass\iclass.DBF' ...
- docker daemon文件/etc/docker/daemon.json配置
On Linux The default location of the configuration file on Linux is /etc/docker/daemon.json. The --c ...
- .net 分布式架构之分布式锁实现(转)
分布式锁是控制分布式系统之间同步访问共享资源的一种方式.在分布式系统中,常常需要协调他们的动作.如果不同的系统或是同一个系统的不同主机之间共享了一个或一组资源,那么访问这些资源的时候,往往需要互斥来防 ...
- Android 4.0关于开机启动服务
针对使用App应用管理强制停止的App,重启系统后不能收到开机启动, 需要运行一次后,在下次再启动时,才可以正确收到.
- System.Web.HttpUtility VS System.Web.HttpServerUtility VS System.Net.WebUtility
HttpUtility 类作为 HttpServerUtility 类的内部使用,HttpServerUtility 通过System.Web.UI.Page.Server属性(WebForm)/Co ...
- Swift:超炫的View Controller切换动画
匿名社交应用Secret的开发者开发了一款叫做Ping的应用,用户可以他们感兴趣的话题的推送. Ping有一个很炫的东西,就是主界面和之间切换的动画做的非常的好.每次看到一个非常炫的动画,都不由得会想 ...
- Project Tango Explorer
https://sensortower.com/android/ie/projecttango-google/app/project-tango-explorer/com.projecttango.t ...