Shadow Map 实现极其细节
这里不介绍算法原理,只说说在实现过程中遇到的问题,以及背后的原因。开发环境:opengl 2.0 glsl 1.0。
第一个问题:产生深度纹理。
在opengl中每一次离屏渲染需要向opengl提供一个renderframe,一个renderframe包含一个texture和一个renderbuffer.texture是一个存储特定数据的内存区,可以存储颜色,深度以及模版。renderbuffer目前不太清楚。
具体代码如下:
glGenFramebuffers(, &frameBuff) ;
glBindFramebuffer(GL_FRAMEBUFFER, frameBuff) ; glGenTextures(, &depthTxe) ;
glBindTexture(GL_TEXTURE_2D, depthTxe) ;
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
glTexImage2D(GL_TEXTURE_2D, , GL_DEPTH_COMPONENT16 , mapWidth, mapHight, , GL_DEPTH_COMPONENT, GL_FLOAT, );
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, depthTxe, );
glDrawBuffer(GL_NONE) ;
glReadBuffer(GL_NONE) ;
GLenum result = glCheckFramebufferStatus(GL_FRAMEBUFFER);
if( result == GL_FRAMEBUFFER_COMPLETE) {
cout << "Framebuffer is complete.\n" << endl ;
} else {
cout <<"Framebuffer is not complete.\n" << endl ;
}
这里需要注意的是,一定要加 glDrawBuffer(GL_NONE) ; glReadBuffer(GL_NONE) 。分别告诉opengl没有缓冲区接受或者读取颜色数据。因为我们需要的是深度数据。如果没有这两句,那么返回的result是not complete。
曾经尝试过使用 glTexImage2D 中使用 GL_RGB 而不是 GL_DEPTH_COMPONENT16 相应的下面的 glFramebufferTexture2D 也要使用 GL_COLOR_ATTACHMENT。在fragment shader中将片元的深度值写入color中。但是这样有个问题,就是精度不够,虽然数据是对的,精度在Shadow Map中有着极其重要的位置,稍后介绍。
问题二:各种坐标系的转化
这里涉及到两个变化过程。第一个是从物体坐标系-》世界坐标系-》灯光坐标系-》裁剪坐标系(齐次坐标系)-》cvv坐标系(透视除法后得到)。
另一个是物体坐标系-》世界坐标系-》摄像机坐标系-》裁剪坐标系(齐次坐标系)-》cvv坐标系(透视除法后得到)。
具体vertex shader 如下
varying vec3 normal ;
varying vec4 lightVertex ;
varying vec4 color ;
varying vec4 worldCoord ;
uniform mat4 lightProj;
uniform mat4 lightView;
const mat4 biasMatrix = mat4(0.5 , 0.0 , 0.0 , 0.0 ,
0.0 , 0.5 , 0.0 , 0.0 ,
0.0 , 0.0 , 0.5 , 0.0 ,
0.5 , 0.5 , 0.5 , 1.0 ) ;
void main()
{
worldCoord = gl_ModelViewMatrix * gl_Vertex ;
normal = normalize(gl_NormalMatrix * gl_Normal);
lightVertex = lightProj * lightView * worldCoord ;
lightVertex = lightVertex / lightVertex.w ;
lightVertex = biasMatrix * lightVertex ;
//lightVertex = lightVertex / lightVertex.w ;
gl_TexCoord[] = gl_MultiTexCoord0 ;
color = gl_Color ;
gl_Position = gl_ProjectionMatrix * gl_ModelViewMatrix * gl_Vertex ;
}
这里需要注意的是glsl中没有提供从物体坐标系到世界坐标系的转化,gl_ModelViewMatrix实现的是从物体到相机坐标系的转化,在本次shadow map是实现过程中将一直保证摄像机在世界坐标系的原点位置,方向指向(0,0,-1),向上方向为(0,1,0)。也就是说摄像机和世界坐标系重合。
注意到 biasMatrix,这里可以推知两点:
(1)glsl中是采用列主序的方式存放矩阵的,也就是数据先放完第一列再放第二列。
(2)glsl纹理的坐标被映射到[0,1]之间。用本次shadow map举例,从灯光坐标系到齐次坐标系,经过裁剪以及透视除法后,得到的x,y,z的范围是在[-1,1]之间的,构成一个规范立方体(cvv),那么x , y的值就是纹理在纹理内存中的位置,z就是伪深度,用于z-buffer。但是,opengl在渲染深度纹理时,将x,y,z映射到[0,1]之间,所以要用一个biasMatrix进行平移。
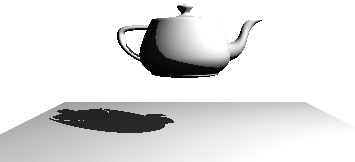
第三个问题:Shadow acne。
这个问题的原因如下图:
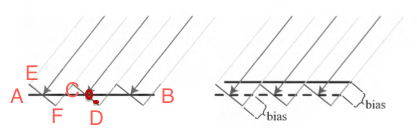
其中,斜线EF是物体表面,当一光柱照射到物体表面时,C点的深度值被写入shadow map中(这里有一个概念:texle , texture element,可以理解为一个像素)。但是,当从摄像机坐标系中看到D点时,通过坐标系转化到shadow map中 ,D点比C点的值远离光源。这样就造成了shadow acne。效果如下:

这时要加上一个偏移两bias,具体计算在fragment shader中,其中的m时具体情况具体调整的,时经验值。
问题四:阴影有锯齿。
如下图:
改进方法时使用多次采样,可以使用采样次sampler2Dshadow,内部会采样一个像素周围的几个像素。也可以使用本次代码中的poissonDisk进行优化。效果如下
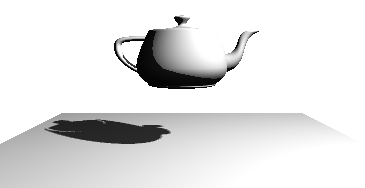
这个poissonDisk(柏松盘采样)内容目前不太了解,貌似效果还不错。
学习心得:在碰到一个新技术时,最好把其最简单的部分实现,然后看看有什么问题,然后慢慢优化。如果不动手实现,很难体会资料上描述的问题的现象,更不用说问题产生的原因。
一下时全部代码:
#include <GLUT/GLUT.h>
#include <iostream>
#include "LoardShaderProgram.h"
#include "BW_READBMP.h"
using namespace std ; struct COLOR
{
float r , g , b, w ;
} ;
float rot = 0.1 ;
float transX = ;
float transY = ;
float transZ = ;
GLint program ;
GLint lightPosLoc ;
GLint lightAmbientLoc ;
GLint lightLambertLoc ;
GLint lightProjLoc ;
GLint lightViewLoc ;
GLint mLoc ;
GLint ksLoc ;
GLint kdLoc ;
GLint kaLoc ;
GLint texLoc ; GLint tex ;
GLint mapWidth = ;
GLint mapHight = ;
GLuint depthTxe ;
GLuint frameBuff ;
GLfloat lightProj[] ;
GLfloat lightView[] ;
float alf = ;
float ks = ;
float kd = 0.5 ;
float ka = 1.0 ;
float m = 0.0035410088 ;
COLOR lightPos ;
void DrawSence()
{
glTranslated(, , -) ;
glBegin(GL_QUADS);
glColor3f(, , ) ; // ground
//glNormal3f( 0.0f, 0.0f, 1.0f);
glTexCoord2f(0.0f, 0.0f);
glNormal3f(, , ) ;
glVertex3f(4.0f, -2.0f, -4.0f);
glNormal3f(, , ) ;
glTexCoord2f(0.0f, 1.0f);
glVertex3f( -4.0f, -2.0f, -4.0f);
glNormal3f(, , ) ;
glTexCoord2f(1.0f, 1.0f);
glVertex3f( -4.0f, -2.0f, 4.0f);
glNormal3f(, , ) ;
glTexCoord2f(1.0f, 0.0f);
glVertex3f(4.0f, -2.0f, 4.0f); glEnd() ; glTranslated(transX, transY , transZ) ;
glRotatef(rot,1.0,0.0,1.0);
glutSolidTeapot();
}
void ProcessKeyboard(unsigned char key,int x,int y)
{
if (key == 'x' || key == 'X')
{
rot += 0.8;
}
if (key == 'c' || key == 'C')
{
m += 0.00001 ;
}
if (key == 'd' || key == 'D')
{
m -= 0.00001 ;
}
if (key == 'u' || key == 'U')
{
transX += 0.3 ;
}
if (key == 'i' || key == 'I')
{
transX -= 0.3 ;
}
if (key == 'j' || key == 'J')
{
transY += 0.3 ;
}
if (key == 'k' || key == 'K')
{
transY -= 0.3 ;
}
if (key == 'o' || key == 'O')
{
transZ += 0.3 ;
}
if (key == 'p' || key == 'P')
{
transZ -= 0.3 ;
} glutPostRedisplay() ;
} void ReSizeScene(int width , int height)
{
if( height== )
{
height=;
}//if //设置视口
glViewport(,,width,height);
//设置透视矩阵
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(45.0f,(GLfloat)width/(GLfloat)height,0.1f,100.0f);
//开始对模型矩阵进行操作
glMatrixMode(GL_MODELVIEW);
//复位
glLoadIdentity();
}
void GenDepthMap()
{
lightPos.r = ; lightPos.g = ; lightPos.b = -; lightPos.w = ;
glBindFramebuffer(GL_FRAMEBUFFER, frameBuff) ;
glDrawBuffer(GL_NONE) ;
glViewport(, , mapWidth, mapHight) ;
glMatrixMode(GL_PROJECTION) ;
glLoadIdentity() ;
gluPerspective(, 4.0/, 0.1, ) ;
glGetFloatv(GL_PROJECTION_MATRIX, lightProj) ;
glMatrixMode(GL_MODELVIEW) ;
glLoadIdentity() ;
gluLookAt(lightPos.r, lightPos.g, lightPos.b, , , -, , , ) ;
glGetFloatv(GL_MODELVIEW_MATRIX,lightView) ;
glDisable(GL_TEXTURE_2D) ;
// glUseProgram(shadowPro) ;
glClearColor(1.0, 1.0, 1.0, 1.0 );
glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT) ;
DrawSence() ;
glUseProgram() ;
glBindFramebuffer(GL_FRAMEBUFFER, ) ;
glDrawBuffer(GL_FRONT) ;
}
void ShowSence()
{
ReSizeScene(, ) ;
COLOR lightAmbient , lightLambert ;
COLOR CameralDir , CameralPos;
lightAmbient.r = 0.1;lightAmbient.g = lightAmbient.b = 0.1; lightAmbient.w = ;
lightLambert.r = ; lightLambert.g = lightLambert.b = ;lightLambert.w = ; CameralDir.r = ;
CameralDir.g = ;
CameralDir.b = - ;
CameralDir.w = ; CameralPos.r = ;
CameralPos.g = ;
CameralPos.b = ;
CameralPos.w = ;
ka = ;
kd = 0.7 ;
ks = 0.4 ;
tex = ;
glActiveTexture(GL_TEXTURE0) ;
glBindTexture(GL_TEXTURE_2D, depthTxe) ;
glUseProgram(program) ;
glUniform4f(lightPosLoc, lightPos.r, lightPos.g, lightPos.b, lightPos.w) ;
glUniform4f(lightAmbientLoc, lightAmbient.r, lightAmbient.g, lightAmbient.b, lightAmbient.w) ;
glUniform4f(lightLambertLoc, lightLambert.r, lightLambert.g, lightLambert.b, lightLambert.w) ;
glUniformMatrix4fv(lightProjLoc, , GL_FALSE, lightProj) ;
glUniformMatrix4fv(lightViewLoc, , GL_FALSE, lightView) ;
glUniform1f(mLoc, m) ;
glUniform1f(kdLoc, kd) ;
glUniform1f(ksLoc, ks) ;
glUniform1f(kaLoc, ka) ;
glUniform1i(texLoc , tex) ;
gluLookAt(CameralPos.r, CameralPos.g , CameralPos.b, CameralDir.r, CameralDir.g , CameralDir.b, , , ) ;
glClear(GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT) ;
DrawSence() ;
glUseProgram() ;
glFlush();
}
void display()
{
GenDepthMap() ;
ShowSence() ;
} void InitScene()
{
glClearColor(1.0, 1.0, 0.0, 1.0) ;
glGenFramebuffers(, &frameBuff) ;
glBindFramebuffer(GL_FRAMEBUFFER, frameBuff) ; glGenTextures(, &depthTxe) ;
glBindTexture(GL_TEXTURE_2D, depthTxe) ;
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
glTexImage2D(GL_TEXTURE_2D, , GL_DEPTH_COMPONENT16 , mapWidth, mapHight, , GL_DEPTH_COMPONENT, GL_FLOAT, );
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, depthTxe, );
glDrawBuffer(GL_NONE) ;
glReadBuffer(GL_NONE) ;
GLenum result = glCheckFramebufferStatus(GL_FRAMEBUFFER);
if (result == GL_FRAMEBUFFER_INCOMPLETE_READ_BUFFER)
{
cout << "frambuffer GL_FRAMEBUFFER_INCOMPLETE_DRAW_BUFFER " << endl ;
} if( result == GL_FRAMEBUFFER_COMPLETE) {
cout << "Framebuffer is complete.\n" << endl ;
} else {
cout <<"Framebuffer is not complete.\n" << endl ;
} glBindFramebuffer(GL_FRAMEBUFFER, ) ;
glBindTexture(GL_TEXTURE_2D, ) ; SHADERINFO shaderInfo[] ;
shaderInfo[].shader_type = GL_VERTEX_SHADER ;
shaderInfo[].name = "ShadowMap.vertex" ;
shaderInfo[].shader_type = GL_FRAGMENT_SHADER ;
shaderInfo[].name = "ShadowMap.frag" ;
program = BWLoadShaders(shaderInfo, ) ;
lightPosLoc = glGetUniformLocation(program, "lightPos") ;
lightAmbientLoc = glGetUniformLocation(program, "lightAmbient") ;
lightLambertLoc = glGetUniformLocation(program, "lightLambert") ;
lightProjLoc = glGetUniformLocation(program, "lightProj") ;
lightViewLoc = glGetUniformLocation(program, "lightView") ;
mLoc = glGetUniformLocation(program, "m") ;
kdLoc = glGetUniformLocation(program, "kd") ;
ksLoc = glGetUniformLocation(program, "ks") ;
kaLoc = glGetUniformLocation(program, "ka") ;
texLoc = glGetUniformLocation(program, "tex") ;
glEnable(GL_DEPTH_TEST) ;
glDepthFunc(GL_LEQUAL);
glShadeModel(GL_FLAT) ; } int main(int argc, char ** argv)
{
glutInit(&argc, argv);
glutInitWindowSize(, );
glutInitDisplayMode(GLUT_RGB|GLUT_DEPTH) ;
glutCreateWindow("SHADERTEST");
glutKeyboardFunc(&ProcessKeyboard) ;
InitScene() ;
glutDisplayFunc(display);
glutMainLoop();
}
ShadowMap.vertex
varying vec3 normal ;
varying vec4 lightVertex ;
varying vec4 color ;
varying vec4 worldCoord ;
uniform mat4 lightProj;
uniform mat4 lightView;
uniform vec4 lightPos ;
uniform vec4 lightLambert ;
uniform vec4 lightAmbient ; const mat4 biasMatrix = mat4(0.5 , 0.0 , 0.0 , 0.0 ,
0.0 , 0.5 , 0.0 , 0.0 ,
0.0 , 0.0 , 0.5 , 0.0 ,
0.5 , 0.5 , 0.5 , 1.0 ) ;
void main()
{
worldCoord = gl_ModelViewMatrix * gl_Vertex ;
normal = normalize(gl_NormalMatrix * gl_Normal);
lightVertex = lightProj * lightView * worldCoord ;
lightVertex = lightVertex / lightVertex.w ;
lightVertex = biasMatrix * lightVertex ;
//lightVertex = lightVertex / lightVertex.w ;
gl_TexCoord[] = gl_MultiTexCoord0 ;
color = gl_Color ;
gl_Position = gl_ProjectionMatrix * gl_ModelViewMatrix * gl_Vertex ;
}
ShadowMap.frag
uniform sampler2D tex ;
uniform vec4 lightPos ;
uniform vec4 lightLambert ;
uniform vec4 lightAmbient ;
uniform float m ;
uniform float ka ;
uniform float kd ;
uniform float ks ;
varying vec3 normal ;
varying vec4 lightVertex ;
varying vec4 color ;
varying vec4 worldCoord ;
void main()
{
vec2 poissonDisk[] ;
poissonDisk[] = vec2( -0.94201624, -0.39906216 ) ;
poissonDisk[] = vec2( 0.94558609, -0.76890725 ) ;
poissonDisk[] = vec2( -0.094184101, -0.92938870 );
poissonDisk[] = vec2( 0.34495938, 0.29387760 ) ;
vec3 l = normalize(lightPos - worldCoord).xyz ;
vec3 n = normalize(normal) ;
vec3 v = normalize(-worldCoord).xyz ;
float d = max(dot(n , l) , 0.0) ;
float s = max(dot(normalize(v + l) , n) , 0.0) ;
float cosTheta = dot(n , l) ;
float bias = m*tan(acos(cosTheta));
float shadow = 1.0 ;
//使用poissonDisk采样优化锯齿
for (int i = ; i < ; ++i)
{
if ( texture2D( tex, lightVertex.xy + poissonDisk[i]/700.0 ).z < lightVertex.z-bias ){
shadow -=0.2;
}
}
//不使用优化
/*float depth = texture2D(tex , lightVertex.xy).z ; if (depth + bias < lightVertex.z )
{
shadow = 0.2 ;
}*/
// shadow = 0.5 ;
vec4 finalColor = vec4(0.0 , 0.0 , 0.0 , 1.0) ;
//finalColor *= shadow ;
finalColor = (finalColor + ks * s * lightLambert + ka*lightAmbient + kd * d * lightLambert)*shadow;
gl_FragColor = finalColor ;
}
Shadow Map 实现极其细节的更多相关文章
- [工作积累] shadow map问题汇总
1.基本问题和相关 Common Techniques to Improve Shadow Depth Maps: https://msdn.microsoft.com/en-us/library/w ...
- Shadow Map阴影贴图技术之探 【转】
这两天勉勉强强把一个shadowmap的demo做出来了.参考资料多,苦头可不少.Shadow Map技术是目前与Shadow Volume技术并行的传统阴影渲染技术,而且在游戏领域可谓占很大优势.本 ...
- (转)Shadow Map & Shadow Volume
转自:http://blog.csdn.net/hippig/article/details/7858574 shadow volume 这个术语几乎是随着 DOOM3 的发布而成为FPS 玩家和图形 ...
- [ZZ] Shadow Map
Shadow Map 如何能够高效的产生更接近真实的阴影一直是视频游戏的一个很有挑战的工作,本文介绍目前所为人熟知的两种阴影技术之一的ShadowMap(阴影图)技术. ShadowMap技术 ...
- Unity基础6 Shadow Map 阴影实现
这篇实现来的有点墨迹,前前后后折腾零碎的时间折腾了半个月才才实现一个基本的shadow map流程,只能说是对原理理解更深刻一些,但离实际应用估计还需要做很多优化.这篇文章大致分析下shadow ma ...
- Unity基础(5) Shadow Map 概述
这篇是自己看shadow map是的一些笔记,内容稍稍凌乱,如有错误请帮忙纠正 1.常见阴影处理方式 Shadow Map : using Z-Buffer Shadow Mapping 的原理与实践 ...
- Shadow Map 原理和改进 【转】
http://blog.csdn.net/ronintao/article/details/51649664 参考 1.Common Techniques to Improve Shadow Dept ...
- UI5 Source code map机制的细节介绍
在我的博客A debugging issue caused by source code mapping里我介绍了在我做SAP C4C开发时遇到的一个曾经困扰我很久的问题,最后结论是这个问题由于Jav ...
- GraphicsLab Project之再谈Shadow Map
作者:i_dovelemon 日期:2019-06-07 主题:Shadow Map(SM), Percentage Closer Filtering(PCF), Variance Shadow Ma ...
随机推荐
- C语言——第四次作业(2)
作业要求一 项目wordcount 设计思路:输入需统计的文件名,打开此文件,输入功能对应的字符,分别实现对应的功能,关闭文件. 主要代码 #include<stdio.h> #inclu ...
- 每天一个linux命令(网络):【转载】ifconfig命令
许多windows非常熟悉ipconfig命令行工具,它被用来获取网络接口配置信息并对此进行修改.Linux系统拥有一个类似的工具,也就是ifconfig(interfaces config).通常需 ...
- test20181029 宝藏
题意 分析 考场做法 一眼看出是支持换根的树形dp. 用\(f(x,0/1)\)表示x及其子树中,从x出发,不一定/一定回到x的最大收益. 然后子树很好做. 换根的时候,我先计算后还原,需要考虑很多, ...
- Request.getInputStrema只能读取一次的分析过程
1. 我们先来看一下继承关系HttpServletRequest 接口继承ServletRequest接口 public abstract interface ServletRequest{ pub ...
- Linux菜鸟入门级命令大全
1. man 对你熟悉或不熟悉的命令提供帮助解释eg:man ls 就可以查看ls相关的用法注:按q键或者ctrl+c退出,在linux下可以使用ctrl+c终止当前程序运行.2. ls 查看目录或者 ...
- apache伪静态设置
在网站根目录下新建一个.htaccess文件即可,编辑如下 RewriteEngine On #游戏列表详细介绍 RewriteRule ^g-([0-9]+).html$ game.php?acti ...
- PostgreSQL 9.6 keepalived主从部署
## 环境: PostgreSQL版:9.6 角色 OS IPmaster CentOS7 ...
- 7z 7zip 日期、时间,文件名
from: http://hi.baidu.com/guicomeon/item/c0957c373972fbc52f8ec26e 先说明一点,要注意区分当前所使用的系统,中文系统和英文系统是有区别的 ...
- "废物利用"也抄袭——“完全”DIY"绘图仪"<三、上位机程序设计>
上位机的程序主要是解析图片和生成较好的代码,现在实现的功能有灰度打印,二值打印,轮廓打印,骨骼打印.当然,必不可少的是打印大小的控制.测试了一些图片,总体来说,打印速度依次加快,因为打印的内容依次减少 ...
- 给VS类文件添加默认头注释
找到类文件所在路径:C:\Program Files (x86)\Microsoft Visual Studio 12.0\Common7\IDE\ItemTemplatesCache\CSharp\ ...