DeepLab系列
论文:
(DeepLabV1)Semantic image segmentation with deep convolutional nets and fully connected CRFs
(DeepLabV3)Rethinking Atrous Convolution for SemanticImage Segmentation
(DeepLabV3+)
目录
0.简介
DeepLab为一系列的工作,从14年到现在跨度也比较久,我会把每篇工作的关键点都梳理一下,这四篇工作本身也是一代代改进来的,所以会有一些一直延用并改进的东西,也会有DeepLab放弃了的东西,前者我们深入学习,后者简单了解。
1.DeepLab V1
这里只简单说下V1做了什么,详细的讲解我想放到V2里开始讲,因为那时候的研究已经有更深的认识。这里就当作个前情提要吧。
2014年,正是DCNN在图像领域爆发后的那段时间,图像分类、目标检测等领域基于DCNN取得空前进展,语义分割领域当然也会一头扎进去。但对于语义分割这一需要准确位置信息的像素级任务,使用DCNN还需要解决如下问题:
- 重复池化下采样导致分辨率大幅下降,位置信息难以恢复。
- DCNN的空间不变性,位置信息丢失会使最后的分割结果粗糙,丢失细节。
所以本文也出一下两点来解决:
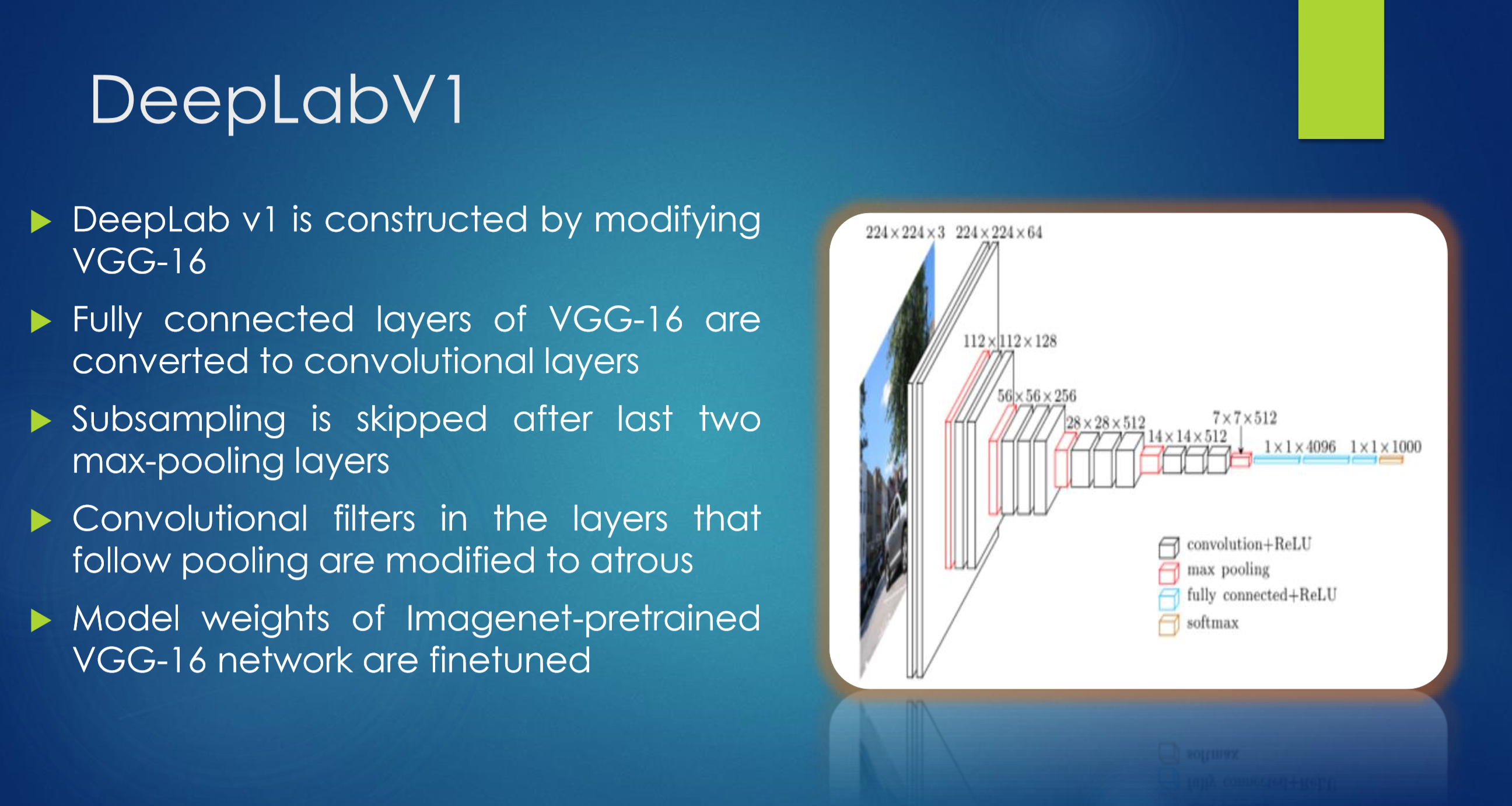
空洞卷积。基于VGG-16改造:
- 因为是做分割,所以把全连接层改成卷积层。
- 把最后两个池化层去掉,后续使用空洞卷积。
Fully Connected CRFs(条件随机场)。
改善DCNN的输出结果,更好捕捉边缘细节。
2. DeepLab V2
到了DeepLabV2的时候,多尺度问题已经被研究着们广泛且深刻的认识到,所以在V2的原文中,把DCNN应用到语义分割需要解决的问题又多了一个多尺度方面的,由原来v1中的两大问题变成此时的三个:
- 重复池化下采样导致分辨率大幅下降,位置信息难以恢复。
- 不同尺度物体的存在。
- DCNN的空间不变性,位置信息丢失会使最后的分割结果粗糙,丢失细节
然后原文给出了对应的三个解决方法:
- 空洞卷积
- ASSP(Atrous Spatial Pyramid Pooling)
- Fully Connected CRF
整体结构
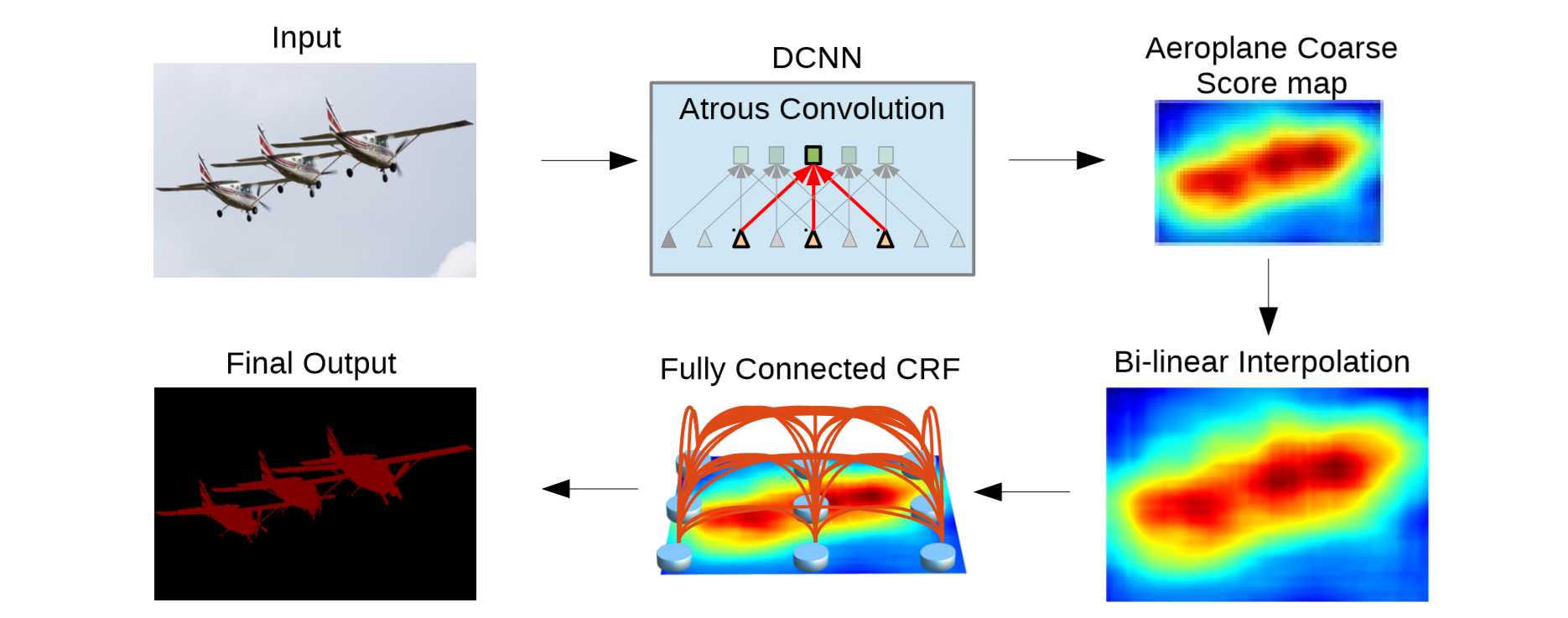
图像输入,进入到改造过的DCNN(VGG-16或ResNet-101,空洞卷积、ASSP都是在这里),得到分辨率略小的特征图,然后进行双线性插值恢复分辨率,使用全连接CRFl来改善分割结果(去噪、平滑、更好的捕捉边界)。
空洞卷积
DCNN随着进行,会使feature map变小,得到更high-level的特征。主要是因为:
- conv的stride>1 —— 为了得到更大感受野
- max pooling操作 —— 为了得到更high-level的特征
得到这样high-level的特征有利于图像分类、目标检测等任务,但DCNN这样的特点不能直接用于语义分割这样的要求高精密的像素级任务。
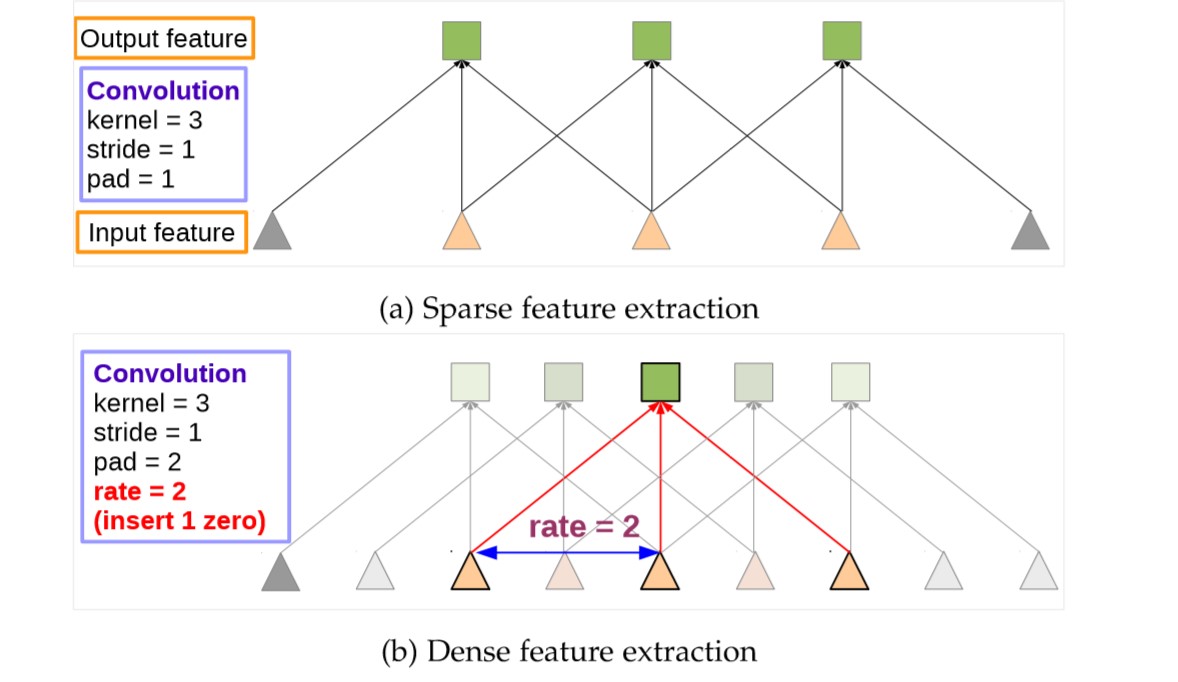
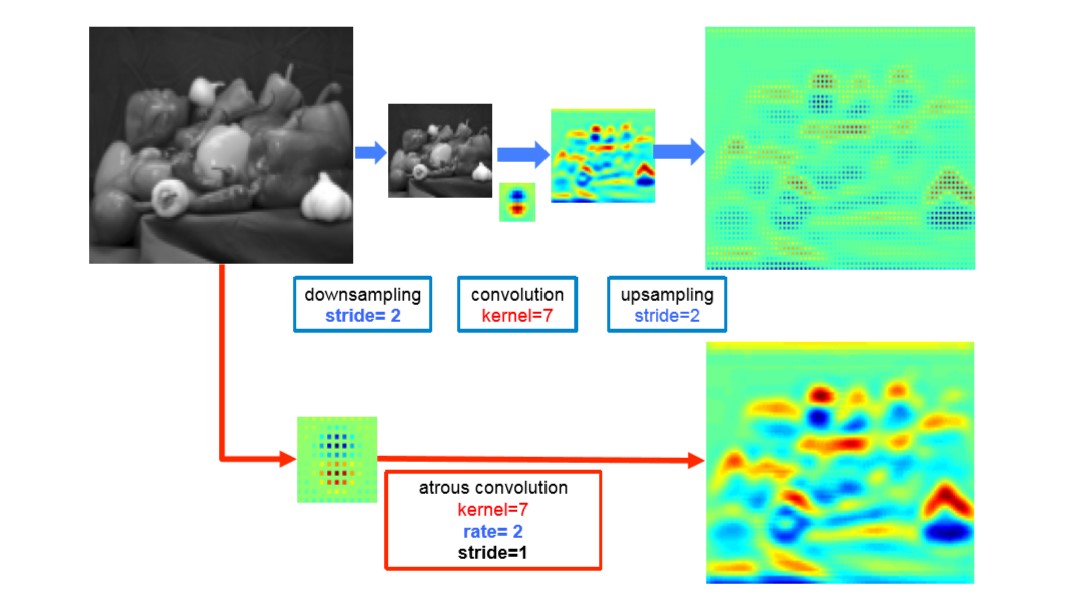
对于这一问题,作者强调(卷积+上采样滤波器)or(空洞卷积)是有力的解决工具,实际使用空洞卷积来解决,空洞卷积由两个优势:一是可以控制图像的分辨率不至于太小,解决上述问题;二是增加感受野。
首先要明白,通过控制参数,在紧密特征图上的空洞卷积可以产生和在系数特征图上标准卷积一模一样的结果;也可以产生更紧密的特征,即高分辨率的特征图,如下图所示:
再结合第三节DeepLabV3串联结构中讲的,应该就完全理解了。
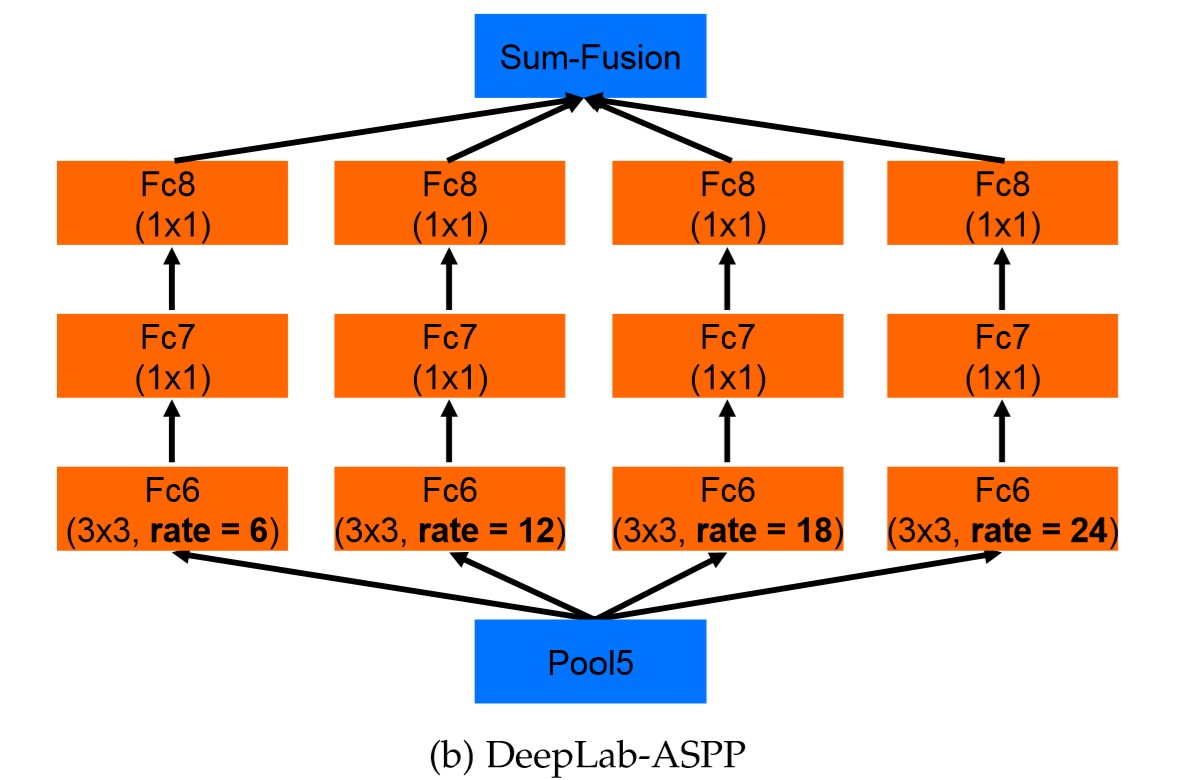
ASSP
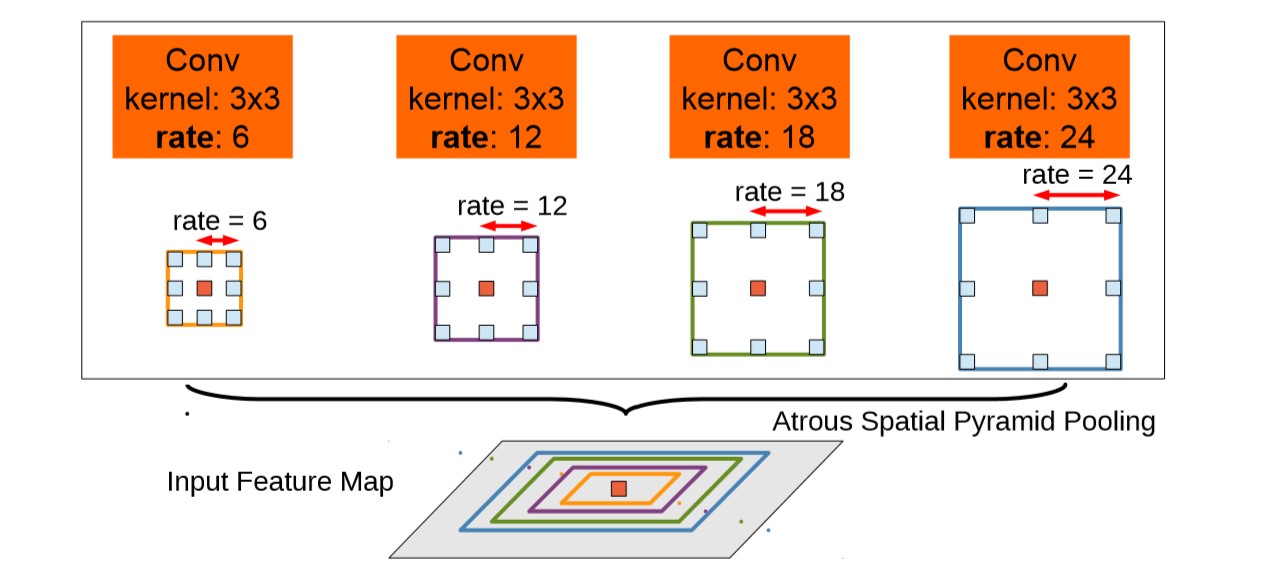
图像中存在多种尺度的物体,这是影响视觉检测、分割等任务精度的一大问题,如果网络抽象能力较强则更容易识别大尺度的物体但会忽略小尺度的物体,如果抽象能力较弱则可以较好识别小物体但抽象大物体的能力势必较弱,就是这样一种矛盾,研究者们提出各种方法来解决,本文基于空洞卷积设计了ASSP结构(Atrous Spatial Pyramid Pooling)。
即得到一feature map后,接入一个并行结构,并行结构中的每个分支结构都一样,唯一不一样的就是各自卷积的膨胀率。如下图所示。不同膨胀率的卷积可以得到不同的感受野,膨胀率小的卷积感受野小,对小尺度的物体识别效果较好;膨胀率大的卷积感受野大,对大尺度的物体识别效果好。空洞卷积对于感受野、并行空洞卷积解决多尺度问题,推荐阅读目标检测领域的一项工作,原理解释、实验非常充实——TridentNet。Scale-Aware Trident Networks for Object Detection
Fully Connected CRF
(这一方法在之后的版本就放弃了,我对此暂时也没有多大兴趣,仅限于跟着论文学习了一遍,这里就简单介绍吧,数学及原理就不再梳理了)
条件随机场(CRF,Conditional Random Field)一般用来处理分割不平滑问题,它只考虑到目标像素点的附近点,是一个短距离的CRFs。由于网络中得到的结果已经比较光滑了,更希望的是修复一些小的结构,处理边缘细节,所以用到了全连接CRF模型。能量函数中有一部分高斯核函数,其值由两点间的位置和颜色决定,位置为主,颜色为辅,算是一句话说一下浅显的说明一下原理吧。
3.DeepLab V3
串联结构
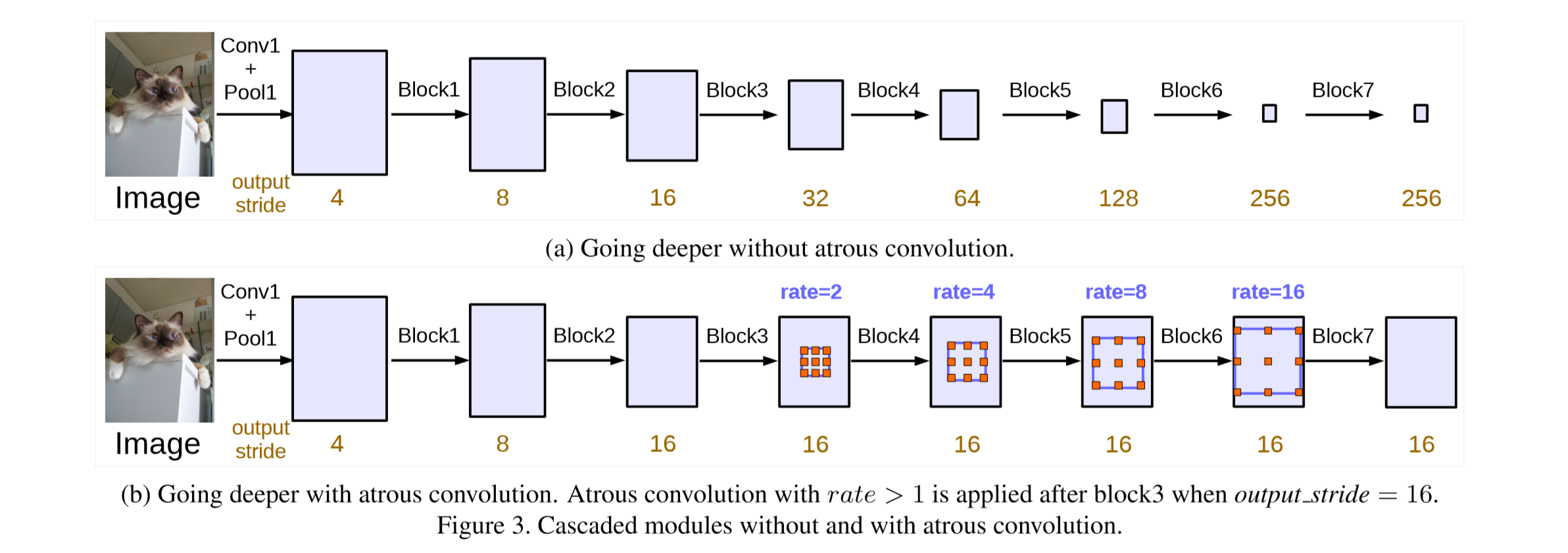
基于ResNet。使用标准卷积时,当网络越来越深,output stride越大,feature map越小。每一个block中有三个3×3的卷积,最后一个卷积的stride=2,feature map就是因为这个变小的(除最后一个block的最后一个卷积,它的stride=1)。
低分辨率的feature map难以恢复位置信息得到好的分割结果。分辨率变低是因为stride=2,令stride=2的原因是,希望随着网络的深入,感受野越来越大,越有利于获得high-level的信息。
那有没有什么办法既能获得较大感受野,又能有高分辨率(output stride低)的特征图呢?就是DeepLab在使用的空洞卷积了!有了第二节DeepLabV2中的空洞卷积介绍基础,看到这里应该完全理解了。
作者设计的这一使用空洞卷积的串联结构,把block4重复了四遍,即block5, block6, block7都是block4的复制品,唯一不同的是其中的膨胀率(rate / dilation),取决于想要的output stride。
作者还考虑了multi-grid方法,即每个block中的三个卷积有各自unit rate,例如Multi Grid = (1, 2, 4),block的dilate rate=2,则block中每个卷积的实际膨胀率=2* (1, 2, 4)=(2,4,8)。
并联结构
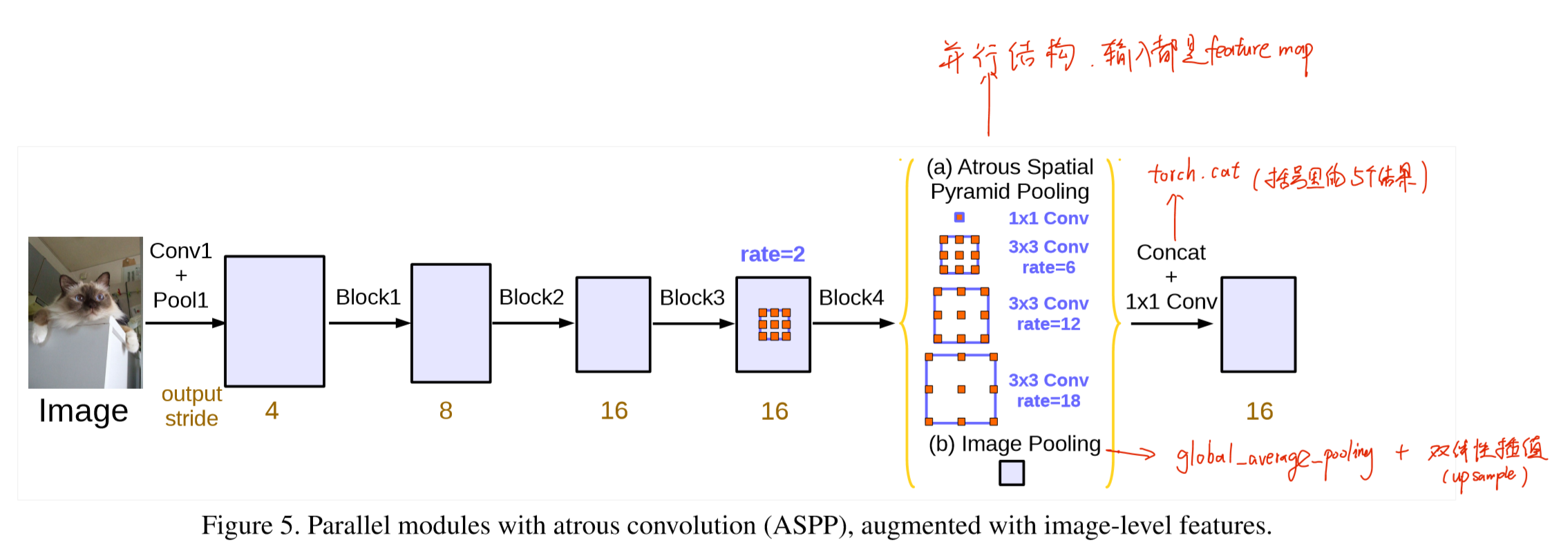
如上图所示,block4之后连接并联结构,其中上面四个为ASSP,下面一个为image-level feature,他们的输入都为前面的feature map,最后这五个结果拼接成一组特征,看源码torch.cat就很好理解了。
ASSP改进
相校对DeepLabV2的ASSP,唯一的区别就是加了BN层...
当想让output stride=16时,ASSP包括了一个1×1卷积,和rate=(6,12 ,18)的3×3卷积,都是256通道。
image-level feature
用ASSP并列加入image-level feature是因为作者为了解决空洞卷积带来的一个问题:
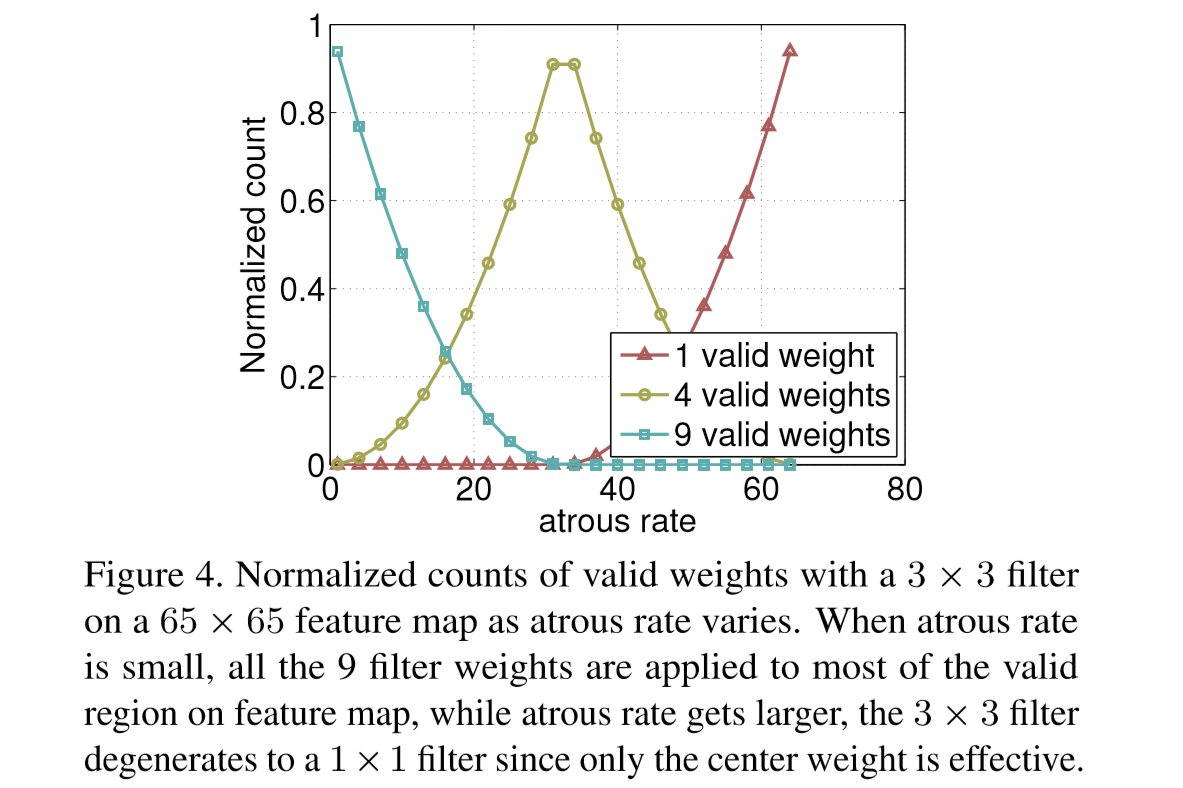
随着空洞卷积的膨胀率(rate/dilation)增大,卷积核有效参数越来越少。是的,这个很容易理解,3×3、rate=1即标准卷积,只有在feature map最外面一圈会有卷积核参数超出边界而无效,当rate变大,越来越多外圈的位置是有卷积核参数失效的,用极限思想思考一下,如果rate=size(feature map),那么每次卷积都是卷核中心对应的feature map像素点被计算了,卷积核参数也只有中心那个点没有失效,退化成了1×1卷积核。
作者正式为了解决这一问题,才在并联结构中加入image-level feature。做法是对输入的feature map全局平均池化(global average pooling),256通道的1×1卷积层,BN层,最后用户双线性插值的方法上采样到目标大小,即与ASSP输出的feature map尺寸相同。
4.DeepLab V3+
加入decoder
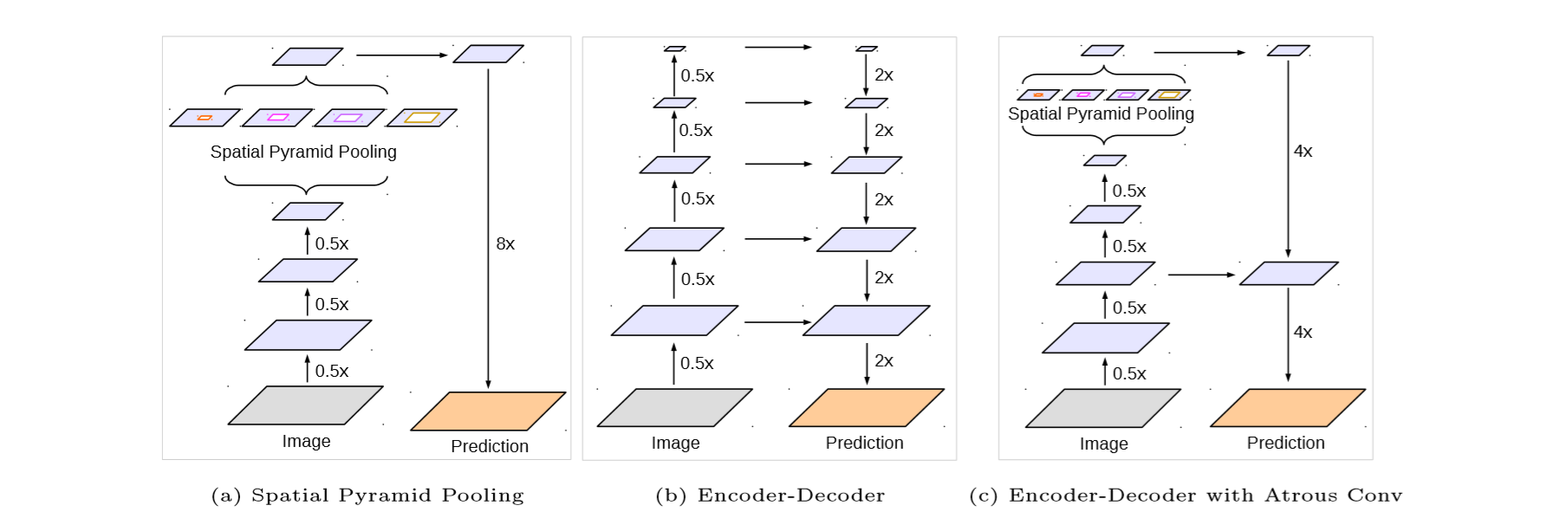
作者把DeepLavV3作为Encoder部分,加入decoder部分,称形成了一种融合了SSP和Encoder-Decoder的新方法。
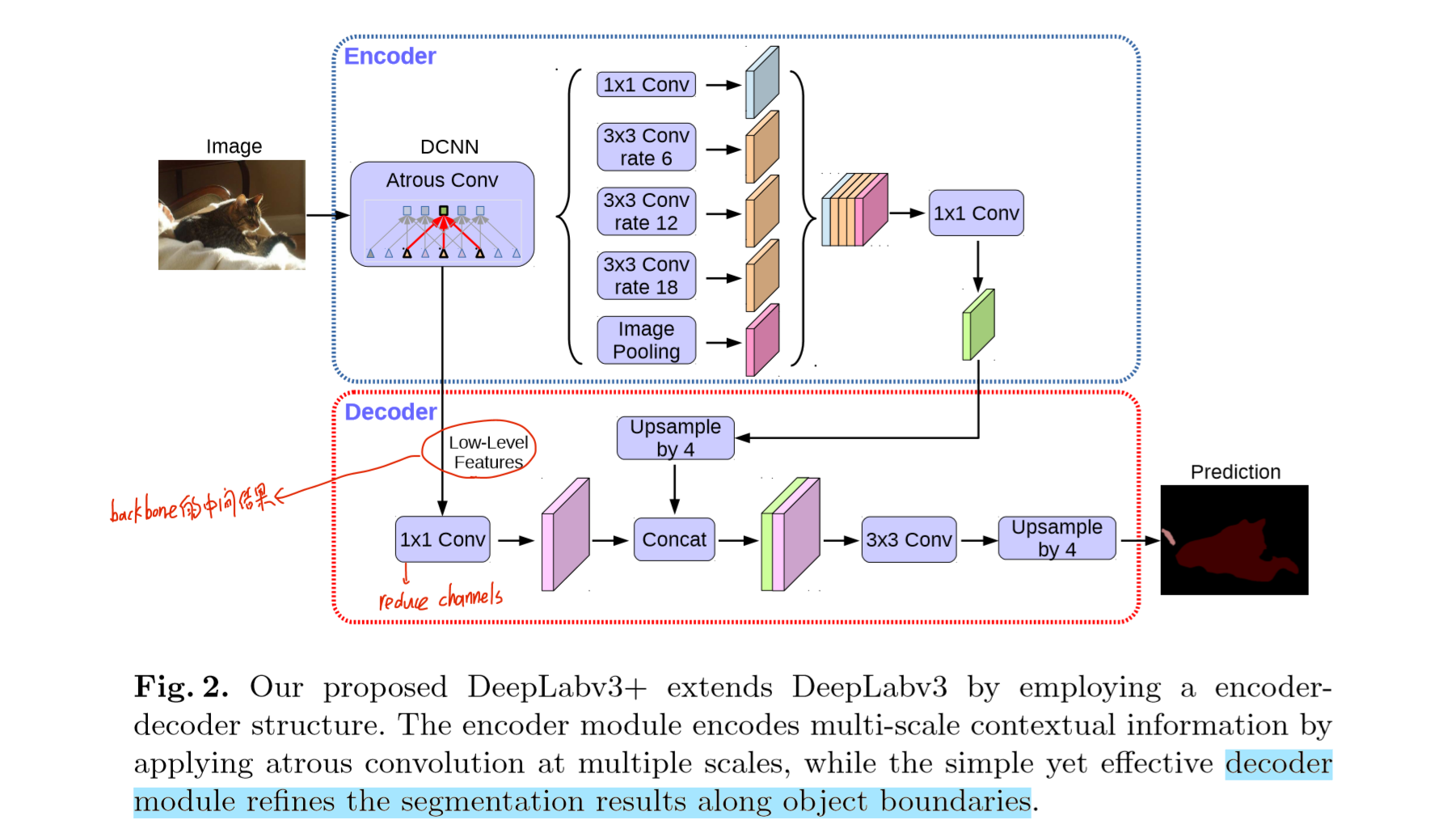
把整个网络DeepLabV3作为Encoder,提取融合多尺度特征;加入一个简单的结构作为Decoder,能够改善分割结构的物体边界。
图中的decoder的输入,即low-level features,并不是和ASSP的输入一样,而是backbone的某个中间计算结果,然后通过一个1×1卷积(为了减少通道数),结果与encoder输出(1×1卷积减少通道数,也上采样了到原来4倍)融合,再经过3×3卷积,再上采样4倍(至此16倍,已经恢复到原图大小)。
深度可分离卷积(depthwise separable convolution)
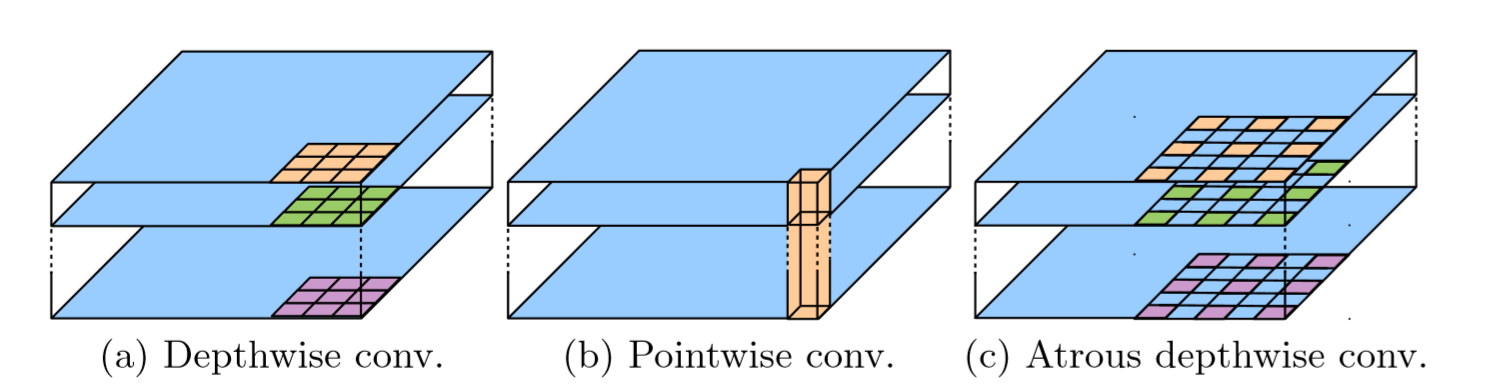
本作中使用了depthwise separable convolution代替标准卷积,Depthwise separable convolution由depthwise convolution和pointwise convoution两步完成。因为它能通过将标准卷积运算分为两步从而减少参数,但实现和标准卷积操作相同的效果。即depthwise separable convolution = depthwise convolution + pointwise convolution(既指流程,也值参数量)。详细内容和具体参数量计算请见下面的个人独立博客,因为我也是学习来的,而且博主写的很清晰明了,所以就不板门弄斧了:https://yinguobing.com/separable-convolution/
当然作者虽然使用了depthwise separable convolution方法来代替标准卷积操作,但依然是还是空洞卷积,看完上面那篇博客(或者本身就掌握深度可分离卷积),应该很容易就明白这句话。Atrous separable convolution只需要更改第一步为间隔取样,第二部pointwise convolution无需特别处理。
DeepLab系列,尤其是后面两作,他们的贡献除了提出新算法模型以外,还包括进行了大量的实验,包括模型中选择某些小结构、参数的对比实验,对于后面的研究者提供了宝贵的经验,节省了大量的实验资源与时间。
另外,学习时参考的代码是第三方pytorch实现的,Github地址放在参考链接里。
参考及引图:
Semantic image segmentation with deep convolutional nets and fully connected CRFs
Rethinking Atrous Convolution for SemanticImage Segmentation
Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation
DeepLab系列的更多相关文章
- 语义分割丨DeepLab系列总结「v1、v2、v3、v3+」
花了点时间梳理了一下DeepLab系列的工作,主要关注每篇工作的背景和贡献,理清它们之间的联系,而实验和部分细节并没有过多介绍,请见谅. DeepLabv1 Semantic image segmen ...
- Deeplab
Deeplab系列是谷歌团队的分割网络. DeepLab V1 CNN处理图像分割的两个问题 下采样导致信息丢失 maxpool造成feature map尺寸减小,细节信息丢失. 空间不变性 所谓空间 ...
- struct2depth 记录
把效果图放在前面 03.28 handle_motion False architecture simple joint_encoder False depth_normalization ...
- 人工智能必须要知道的语义分割模型:DeepLabv3+
图像分割是计算机视觉中除了分类和检测外的另一项基本任务,它意味着要将图片根据内容分割成不同的块.相比图像分类和检测,分割是一项更精细的工作,因为需要对每个像素点分类,如下图的街景分割,由于对每个像素点 ...
- pytorch中检测分割模型中图像预处理探究
Object Detection and Classification using R-CNNs 目标检测:数据增强(Numpy+Pytorch) - 主要探究检测分割模型数据增强操作有哪些? - 检 ...
- 全景分割pipeline搭建
全景分割pipeline搭建 整体方法使用语义分割和实例分割结果,融合标签得到全景分割结果: 数据集使用:panoptic_annotations_trainval2017和cityscapes; p ...
- 理解CNN中的感受野(receptive-field)
1. 阅读论文:Understanding the Effective Receptive Field in Deep Convolutional Neural Networks 理解感受野 定义:r ...
- 自动网络搜索(NAS)在语义分割上的应用(二)
前言: 本文将介绍如何基于ProxylessNAS搜索semantic segmentation模型,最终搜索得到的模型结构可在CPU上达到36 fps的测试结果,展示自动网络搜索(NAS)在语义分割 ...
- SPG-Net: Segmentation Prediction and Guidance Network for Image Inpainting
SPG-Net: Segmentation Prediction and Guidance Network for Image Inpainting pytorch 引言 利用语义分割获取空洞的边缘信 ...
随机推荐
- Crystal Reports --报表设计
完整的报表解决方案 数据访问—>报表设计—>报表管理—>与应用系统集成 一.规划报表 设计报表的准备工作 谁看报表? 报表的数据是什么?(页眉页脚的内容?是否需要分组?是否需要汇总? ...
- ATX学习(一)-atx-server
今天无意中发现了ATX手机设备管理平台,瞬间勾引起了我极大的兴趣,这里对学习过程中的情况做个记录. 1.搭建环境 先按照作者步骤搭建环境出来吧,哇,突然发现ATX搭建环境很方便(一会就搭建好了) ...
- 雨云CDN - 好用的CDN服务
注册雨云 点我 创建CDN 解析CDN 解析完后去试试快了吗?
- 7.CSMA协议
载波监听多路访问协议CSMA CS:载波侦听/监听,每一个站在发送数据之前要检测一下总线上是否有其他计算机在发送数据. MA:多点接入,表示许多计算机以多点接入的方式连接在一根总线上 协议思想:发送帧 ...
- shell脚本带参数启动项目
用maven工程打包时,会将数据库连接一并打进去,如果需要经常修改数据库连接,则需要打开jar包然后修改配置,这样很麻烦耗时并且容易出错. 因此需要将数据库配置放入项目外,这样修改数据库时去固定的配置 ...
- python3的字符串常用方法
find()# 方法 find()# 范围查找子串,返回索引值,找不到返回-1 # 语法 s.find(substring, start=0, end=len(string)) # 参数 # subs ...
- pycharm 退出虚拟环境
pycharm 内置虚拟环境 venv 如果要退出就直接 deactivate 命令就行 运行的话直接在命令行输python3 文件名
- Blash数组 c++
//输入一个数作为Blash数组的根, //对于该数组的每一个数x,x*2+1 x*3+1均在该数组 //并且该数组没有其他数字 //该数组升序排列 //输入a,n 输出该数组第n个数 // // # ...
- 00_01_使用Parallels Desktop创建WindosXP虚拟机
打开paralles软件,选择文件->新建 继续 选择手动选择,之后勾选没有指定源也继续 选择要创建的操作系统(这里以XP为例,其他的windows系统安装基本都差不多) 根据需要选择,这里选择 ...
- Python自动化运维:技术与最佳实践 PDF高清完整版|网盘下载内附地址提取码|
内容简介: <Python自动化运维:技术与最佳实践>一书在中国运维领域将有“划时代”的重要意义:一方面,这是国内第一本从纵.深和实践角度探讨Python在运维领域应用的著作:一方面本书的 ...