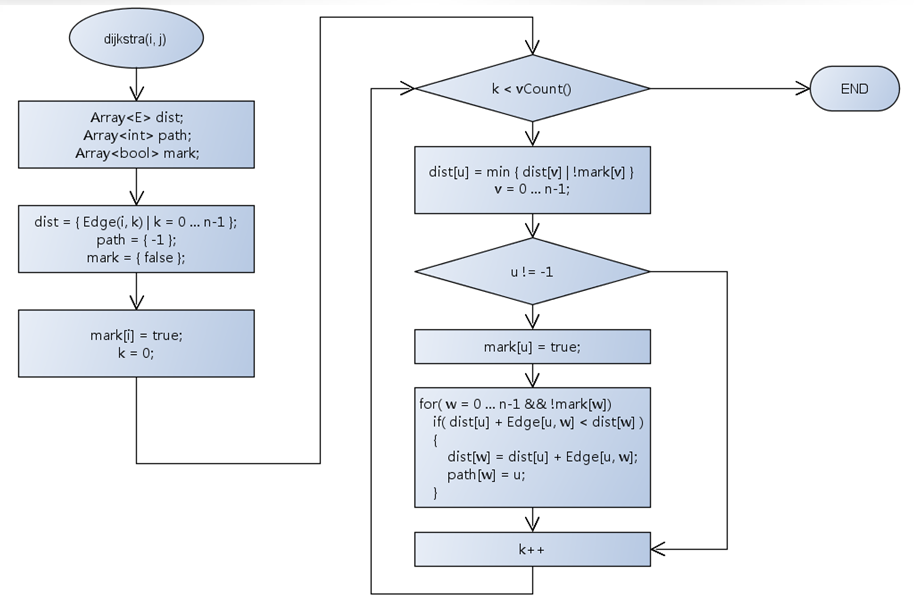
第七十八课 最短路径(Dijkstra)

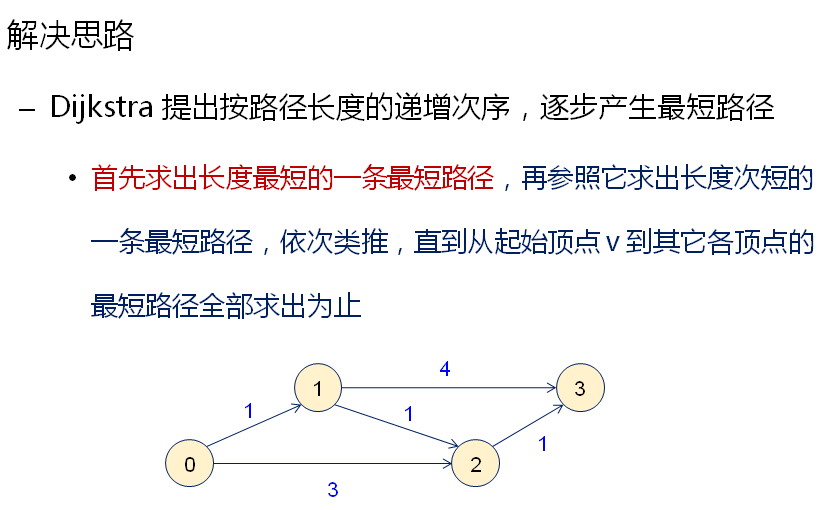
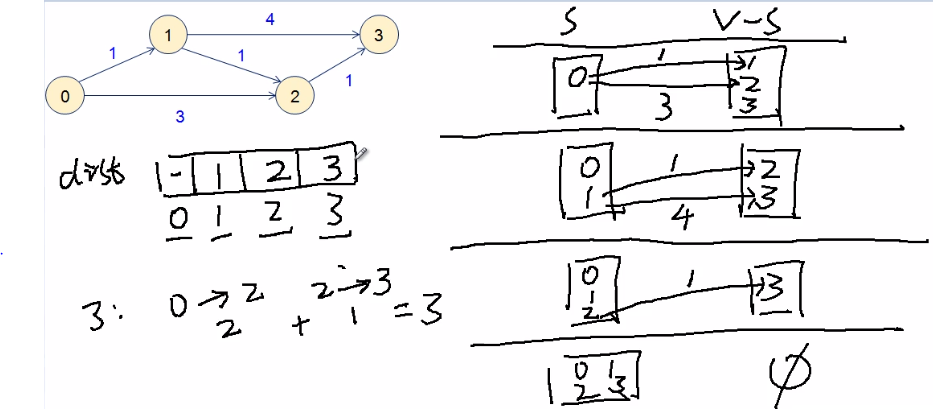
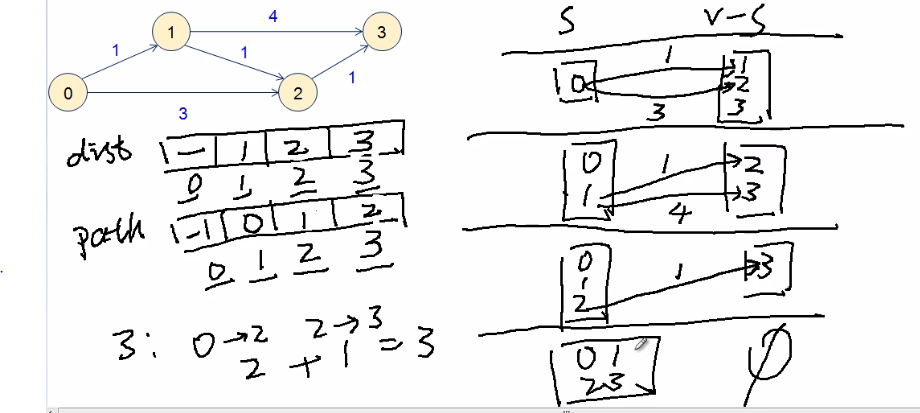
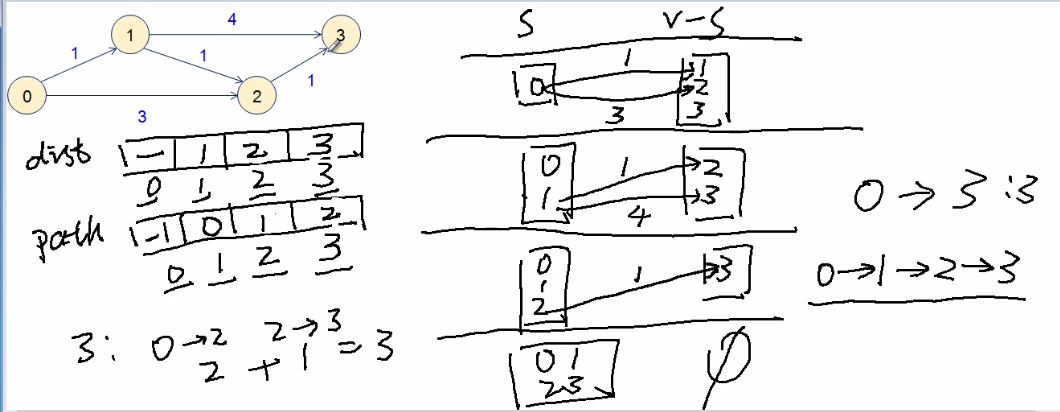
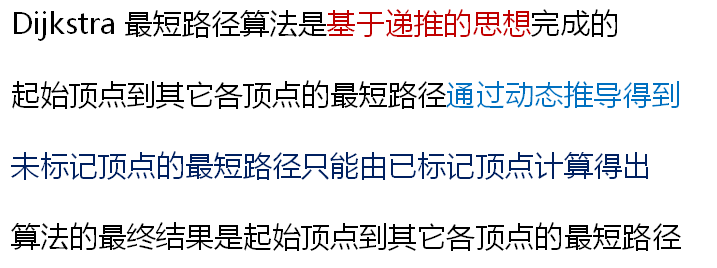
核心思想是从已知的最短路径推算未知的最短路径。





添加程序:
#ifndef GRAPH_H
#define GRAPH_H #include "Object.h"
#include "SharedPointer.h"
#include "Array.h"
#include "DynamicArray.h"
#include "LinkQueue.h"
#include "LinkStack.h"
#include "Sort.h" namespace DTLib
{ template < typename E >
struct Edge : public Object
{
int b;
int e;
E data; Edge(int i=-, int j=-)
{
b = i;
e = j;
} Edge(int i, int j, const E& value)
{
b = i;
e = j;
data = value;
} bool operator == (const Edge<E>& obj)
{
return (b == obj.b) && (e == obj.e); //在这里不关注权值大小
} bool operator != (const Edge<E>& obj)
{
return !(*this == obj);
} bool operator < (const Edge<E>& obj)
{
return (data < obj.data);
} bool operator > (const Edge<E>& obj)
{
return (data > obj.data);
}
}; template < typename V, typename E >
class Graph : public Object
{
protected:
template < typename T >
DynamicArray<T>* toArray(LinkQueue<T>& queue)
{
DynamicArray<T>* ret = new DynamicArray<T>(queue.length()); if( ret != NULL )
{
for(int i=; i<ret->length(); i++, queue.remove())
{
ret->set(i, queue.front());
}
}
else
{
THROW_EXCEPTION(NoEnoughMemoryException, "No memory to create ret object...");
} return ret;
} SharedPointer< Array<Edge<E> > > getUndirectedEdges()
{
DynamicArray<Edge<E>>* ret = NULL; if( asUndirected() )
{
LinkQueue<Edge<E>> queue; for(int i=; i<vCount(); i++)
{
for(int j=i; j<vCount(); j++)
{
if( isAdjacent(i, j) )
{
queue.add(Edge<E>(i, j, getEdge(i, j)));
}
}
} ret = toArray(queue);
}
else
{
THROW_EXCEPTION(InvalidOperationException, "This function is for undirected graph only...");
} return ret;
} int find(Array<int>& p, int v)
{
while( p[v] != -)
{
v = p[v];
} return v;
}
public:
virtual V getVertex(int i) = ;
virtual bool getVertex(int i, V& value) = ;
virtual bool setVertex(int i, const V& value) = ;
virtual SharedPointer< Array<int> > getAdjacent(int i) = ;
virtual bool isAdjacent(int i, int j) = ;
virtual E getEdge(int i, int j) = ;
virtual bool getEdge(int i, int j, E& value) = ;
virtual bool setEdge(int i, int j, const E& value) = ;
virtual bool removeEdge(int i, int j) = ;
virtual int vCount() = ;
virtual int eCount() = ;
virtual int OD(int i) = ;
virtual int ID(int i) = ; virtual int TD(int i)
{
return ID(i) + OD(i);
} bool asUndirected()
{
bool ret = true; for(int i=; i<vCount(); i++)
{
for(int j=; j<vCount(); j++)
{
if( isAdjacent(i, j) )
{
ret = ret && isAdjacent(j, i) && (getEdge(i, j) == getEdge(j, i));
}
}
} return ret;
} SharedPointer< Array< Edge<E > > > prim(const E& LIMIT, const bool MINIUM = true) //参数为理论上的最大权值
{
LinkQueue< Edge<E> > ret; if( asUndirected() )
{
DynamicArray<int> adjVex(vCount());
DynamicArray<bool> mark(vCount());
DynamicArray<E> cost(vCount());
SharedPointer< Array<int> > aj = NULL;
bool end = false;
int v = ; for(int i=; i<vCount(); i++)
{
adjVex[i] = -;
mark[i] = false;
cost[i] = LIMIT;
} mark[v] = true; aj = getAdjacent(v); for(int j=; j<aj->length(); j++)
{
cost[(*aj)[j]] = getEdge(v, (*aj)[j]);
adjVex[(*aj)[j]] = v;
} for(int i=; (i<vCount()) && !end; i++)
{
E m = LIMIT;
int k = -; for(int j=; j<vCount(); j++)
{
if( !mark[j] && (MINIUM ? (cost[j] < m) : (cost[j] > m)))
{
m = cost[j];
k = j;
}
} end = (k == -); if( !end )
{
ret.add(Edge<E>(adjVex[k], k, getEdge(adjVex[k], k))); mark[k] = true; aj = getAdjacent(k); for(int j=; j<aj->length(); j++)
{
if( !mark[(*aj)[j]] && (MINIUM ? (getEdge(k, (*aj)[j]) < cost[(*aj)[j]]) : (getEdge(k, (*aj)[j]) > cost[(*aj)[j]])) )
{
cost[(*aj)[j]] = getEdge(k, (*aj)[j]);
adjVex[(*aj)[j]] = k;
}
}
}
}
}
else
{
THROW_EXCEPTION(InvalidOperationException, "Prim operator is for undirected graph only...");
} if( ret.length() != (vCount() - ) )
{
THROW_EXCEPTION(InvalidOperationException, "No enough edge for prim operation...");
} return toArray(ret);
} SharedPointer< Array<Edge<E> > > kruskal(const bool MINMUM = true)
{
LinkQueue< Edge<E> > ret; SharedPointer< Array< Edge<E> > > edges = getUndirectedEdges(); DynamicArray<int> p(vCount()); //前驱标记数组 for(int i=; i<p.length(); i++)
{
p[i] = -;
} Sort::Shell(*edges, MINMUM); for(int i=; (i<edges->length()) && (ret.length() < (vCount() - )); i++)
{
int b = find(p, (*edges)[i].b);
int e = find(p, (*edges)[i].e); if( b != e )
{
p[e] = b; ret.add((*edges)[i]);
}
} if( ret.length() != (vCount() - ) )
{
THROW_EXCEPTION(InvalidOperationException, "No enough edges for Kruskal operation...");
} return toArray(ret);
} SharedPointer< Array<int> > BFS(int i)
{
DynamicArray<int>* ret = NULL; if( ( <= i) && (i < vCount()) )
{
LinkQueue<int> q;
LinkQueue<int> r;
DynamicArray<bool> visited(vCount()); for(int i=; i<visited.length(); i++)
{
visited[i] = false;
} q.add(i); while( q.length() > )
{
int v = q.front(); q.remove(); if( !visited[v] )
{
SharedPointer< Array<int> > aj = getAdjacent(v); for(int j=; j<aj->length(); j++)
{
q.add((*aj)[j]);
} r.add(v); visited[v] = true;
}
} ret = toArray(r);
}
else
{
THROW_EXCEPTION(InvalidParameterException, "Index i is invalid...");
} return ret;
} SharedPointer< Array<int> > DFS(int i)
{
DynamicArray<int>* ret = NULL; if( ( <= i) && (i < vCount()) )
{
LinkStack<int> s;
LinkQueue<int> r;
DynamicArray<bool> visited(vCount()); for(int j=; j<visited.length(); j++)
{
visited[j] = false;
} s.push(i); while( s.size() > )
{
int v = s.top(); s.pop(); if( !visited[v] )
{
SharedPointer< Array<int> > aj = getAdjacent(v); for(int j=aj->length() - ; j>=; j--)
{
s.push((*aj)[j]);
} r.add(v); visited[v] = true;
}
} ret = toArray(r);
}
else
{
THROW_EXCEPTION(InvalidParameterException, "Index i is invalid...");
} return ret;
} SharedPointer<Array<int>> dijkstra(int i, int j, const E& LIMIT)
{
LinkQueue<int> ret; if( ( <= i) && (i < vCount()) && ( <= j) && (j < vCount()) )
{
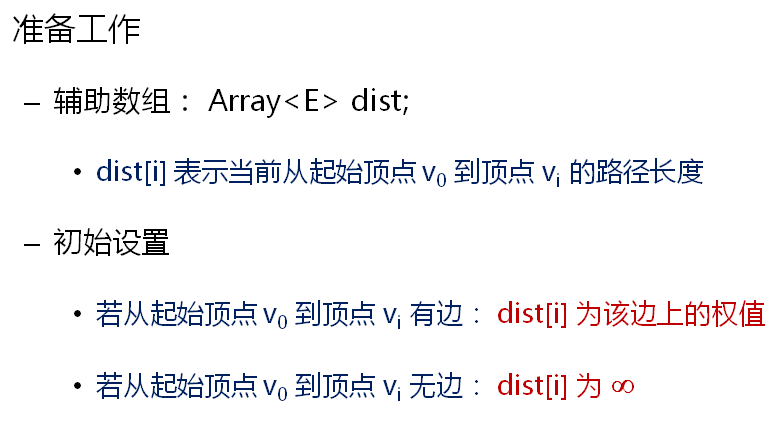
DynamicArray<E> dist(vCount());
DynamicArray<int> path(vCount());
DynamicArray<bool> mark(vCount()); for(int k=; k<vCount(); k++)
{
mark[k] = false;
path[k] = -; dist[k] = isAdjacent(i, k) ? (path[k] = i, getEdge(i, k)) : LIMIT;
} mark[i] = true; for(int k=; k<vCount(); k++)
{
E m = LIMIT;
int u = -; for(int w=; w<vCount(); w++)
{
if( !mark[w] && (dist[w] < m) )
{
m = dist[w];
u = w;
}
} if( u == - )
{
break;
} mark[u] = true; for(int w=; w<vCount(); w++)
{
if( !mark[w] && isAdjacent(u, w) && (dist[u] + getEdge(u, w) < dist[w]) )
{
dist[w] = dist[u] + getEdge(u, w);
path[w] = u;
}
}
} LinkStack<int> s; s.push(j); for(int k=path[j]; k != -; k=path[k])
{
s.push(k);
} while( s.size() > )
{
ret.add(s.top()); s.pop();
}
}
else
{
THROW_EXCEPTION(InvalidParameterException, "Index<i, j> is invalid...");
} if( ret.length() < )
{
THROW_EXCEPTION(ArithmeticException, "There is no path grom i to j...");
} return toArray(ret);
}
}; } #endif // GRAPH_H
测试程序如下:
#include <iostream>
#include "MatrixGraph.h"
#include "ListGraph.h" using namespace std;
using namespace DTLib; template< typename V, typename E >
Graph<V, E>& GraphEasy()
{
static MatrixGraph<, V, E> g; g.setEdge(, , );
g.setEdge(, , );
g.setEdge(, , );
g.setEdge(, , );
g.setEdge(, , ); return g;
} template< typename V, typename E >
Graph<V, E>& GraphComplex()
{
static ListGraph<V, E> g(); g.setEdge(, , );
g.setEdge(, , );
g.setEdge(, , ); g.setEdge(, , ); g.setEdge(, , ); g.setEdge(, , );
g.setEdge(, , ); return g;
} int main()
{
Graph<int, int>& g = GraphComplex<int, int>();
SharedPointer< Array<int> > p = g.dijkstra(, , ); for(int i=; i<p->length(); i++)
{
cout << (*p)[i] << " ";
} cout << endl; return ;
}
结果如下:

小结:
第七十八课 最短路径(Dijkstra)的更多相关文章
- 第七十九课 最短路径(Floyd)
程序如下: #ifndef GRAPH_H #define GRAPH_H #include "Object.h" #include "SharedPointer.h&q ...
- NeHe OpenGL教程 第十八课:二次几何体
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第四十八课:轨迹球
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第三十八课:资源文件
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- NeHe OpenGL教程 第二十八课:贝塞尔曲面
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- Unity3D研究院之Jenkins的使用(七十八)
长夜漫漫无心睡眠,来一篇嘿嘿.我相信如果已经用Shell脚本完成IOS和Android打包的朋友一定需要Jenkins 怎么才能让策划打包ipa和apk?怎么才能彻底省去程序的时间,只要在同一局域网内 ...
- (七十八)使用第三方框架INTULocationManager实现定位
前面(第七十五.七十六篇)讲述了如何通过CoreLocation获取位置,授权.获取等相当复杂,如果借助于第三方框架,可以简单的实现授权与定位. 首先在GitHub中搜索LocationManager ...
- 深入浅出CChart 每日一课——第十八课 女神的套娃,玩转对话框
前面笨笨已经给大家展示了CChart编程的N个例子.这些例子中,我们的CChart图像都是绘制在程序的主窗口中的. 在很多情况下,我们面对的情形不是这样的.这节课笨笨就给大家介绍一下怎样在对话框中用C ...
- 《手把手教你》系列基础篇(七十八)-java+ selenium自动化测试-框架设计基础-TestNG依赖测试- 中篇(详解教程)
1.简介 上一篇讲解了依赖测试的各种方法,今天继续讲解依赖测试的方法,这一篇主要是讲解和分享通过xml文件配置组名依赖方法( 主要是测试组的用法).废话不说,直接上干货. 2.实例 测试组:一个组可包 ...
随机推荐
- Python 互斥锁
互斥锁Mutex的使用 多个线程处理共享数据,数据会出现问题: 2.7之前每100指令切换一次GIL锁,线程就会sleep,线程会把前100条处理指令存放在CPU缓存内,切换GIL锁后放入另外一个线程 ...
- Linux 查看内存状态
# 查看系统内存 命令:free 注:默认k单位显示 注:-m 以MB 注:-g以GB 单位显示 total used free shared buffers cached Mem: -/+ buff ...
- 【题解】JSOIWC2019 Round4
题面: https://files-cdn.cnblogs.com/files/yzhang-rp-inf/P13.gif https://files-cdn.cnblogs.com/files/yz ...
- ant常用的内置 task转自https://www.cnblogs.com/baicj/archive/2015/12/21/5063608.html
ant 例如: <target name="callProjectB"> <echo message="In projectA calling proj ...
- topcoder srm 590 div1 (max_flow_template)
problem1 link 对于每一个,找到其在目标串中的位置,判断能不能移动即可. problem2 link 如果最后的$limit$为$11=(1011)_{2}$,那么可以分别计算值为$(10 ...
- Code Pages
https://docs.microsoft.com/en-us/windows/desktop/intl/code-pages Most applications written today han ...
- centos linux查看硬盘型号
[root@]# smartctl --all /dev/sdasmartctl 6.5 2016-05-07 r4318 [x86_64-linux-3.10.0-957.1.3.el7.x86_6 ...
- 使用MyBatis Generator 1.3.7自动生成代码
MyBatis Generator是一款mybatis自动代码生成工具,可以通过配置后自动生成文件. MyBatis Generator有几种方法可以生成代码,下面是其中一种. 一.官网下载 MyB ...
- P3181 [HAOI2016]找相同字符
思路 广义SAM 把两个字符串建成广义SAM,然后统计两个SAM中相同节点的endpos大小乘积即可 记得开long long 代码 #include <cstdio> #include ...
- node服务的安装以及vue的安装
相信很多朋友都在装node服务和安装vue的时候会遇到一些问题,下面为大家详细介绍node服务的安装以及vue的安装: 1.nodeJs官网下载版本(根据自己电脑的配置进行相应下载即可):默认安装路径 ...