Ubuntu22.04版本安装对应版本ROS教程 (小白2024年)
参考资料:(我是开了加速器,毕竟中间使用了github访问网址,国内免费加速器Steam++,开个github网站加速即可,不开我不知道行不行可以自己一试)
ROS 安装详细教程 —— Ubuntu22.0.4 LTS 安装-CSDN博客
我的虚拟机刚开始设置的是简体中文,此前已经通过初始时的软件更新更新过一次;
在配置完虚拟机后:
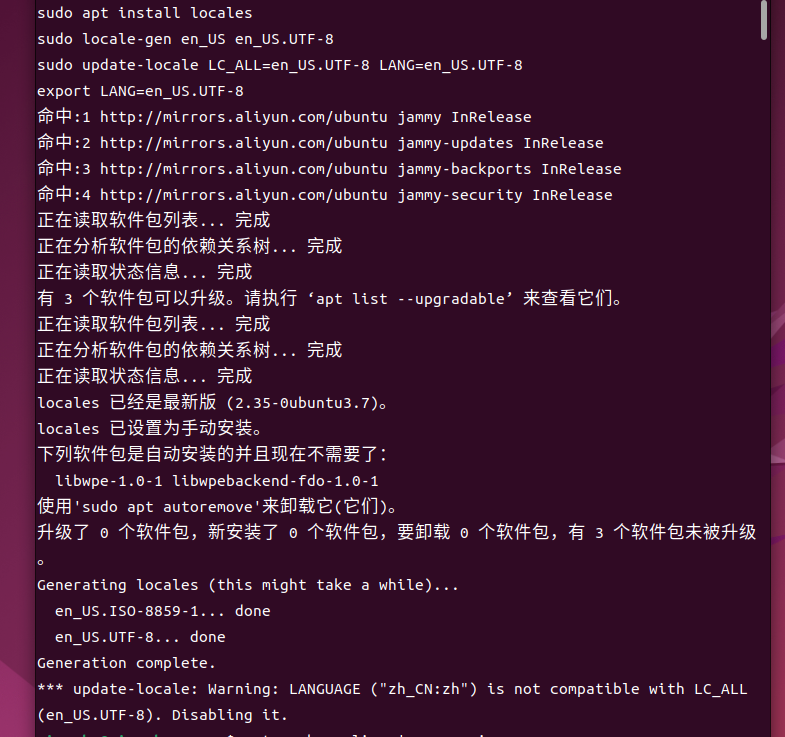
第一步先将字符集设置好如下代码:
sudo apt update
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
下图为相应显示反应:
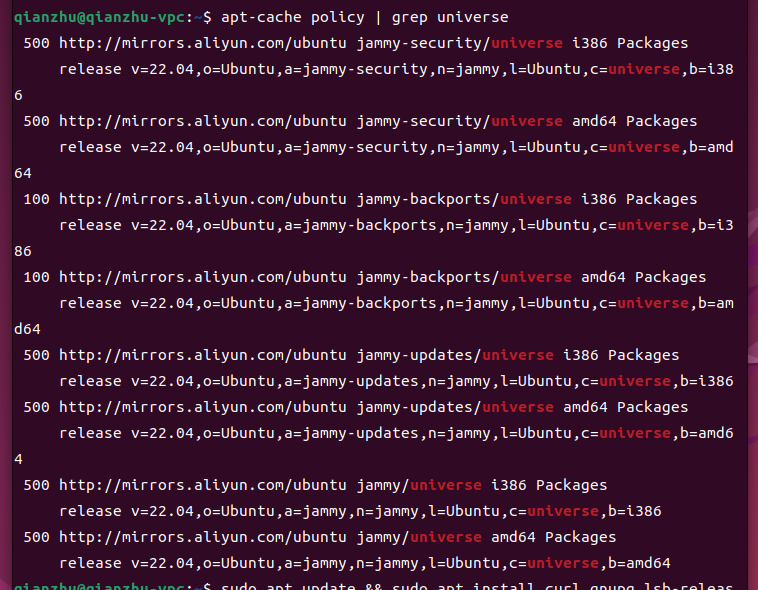
继续输入代码:## 通过检查此命令的输出,确保已启用Ubuntu Universe存储库。
apt-cache policy | grep universe
对应反应大致如下图即可:
下图为参考资料的相关说明:
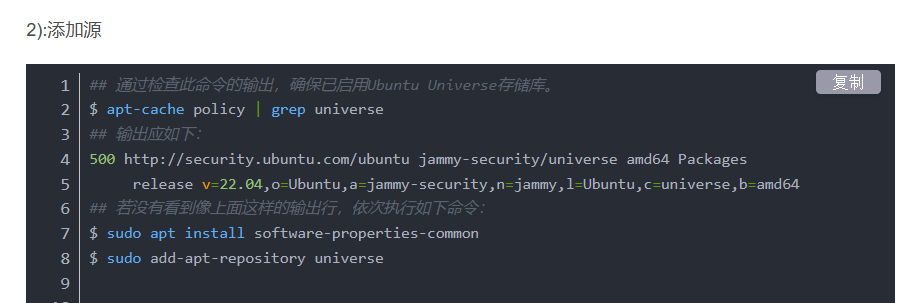
因为我执行完代码并没有出现什么不一样的问题所以上图7,8中代码我是没有使用的,如果在这里使用后具体有什么bug请自行处理,处理完后在留言说明具体办法方便为后来者提供解决办法。
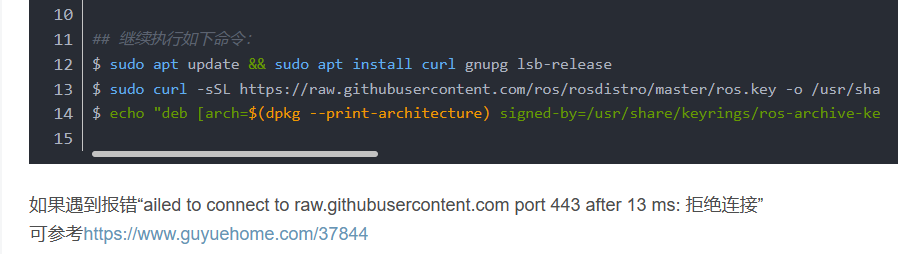
继续下一步操作:
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
参考资料说明:
ps:关键点:害我删了两次虚拟机重新搞;
这里我的错误是如下:

curl: (7) Failed to connect to raw.githubusercontent.com port 443 after 65 ms:
连接被拒绝
解决方法:
法1.可以按照上上图中所指的网页https://www.guyuehome.com/37844,需要加速器加个速比较好上,再按照里面的步骤走,但是不好操作里面还涉及了一些终端文本编辑的操作,具体还要去自己查询处理;
法2:
使用如下代码:
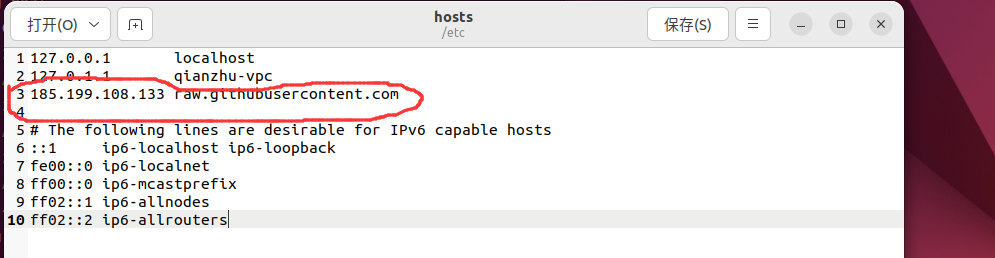
sudo gedit /etc/hosts

使用后会打开一个文本编辑器,在内部增加一行即可:
185.199.108.133 raw.githubusercontent.com
如下图:
保存后关闭即可;
再重复使用一次如下命令:
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
使用后我是没有反应证明连接成功如下图:

继续执行如下代码:
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
反应如下:
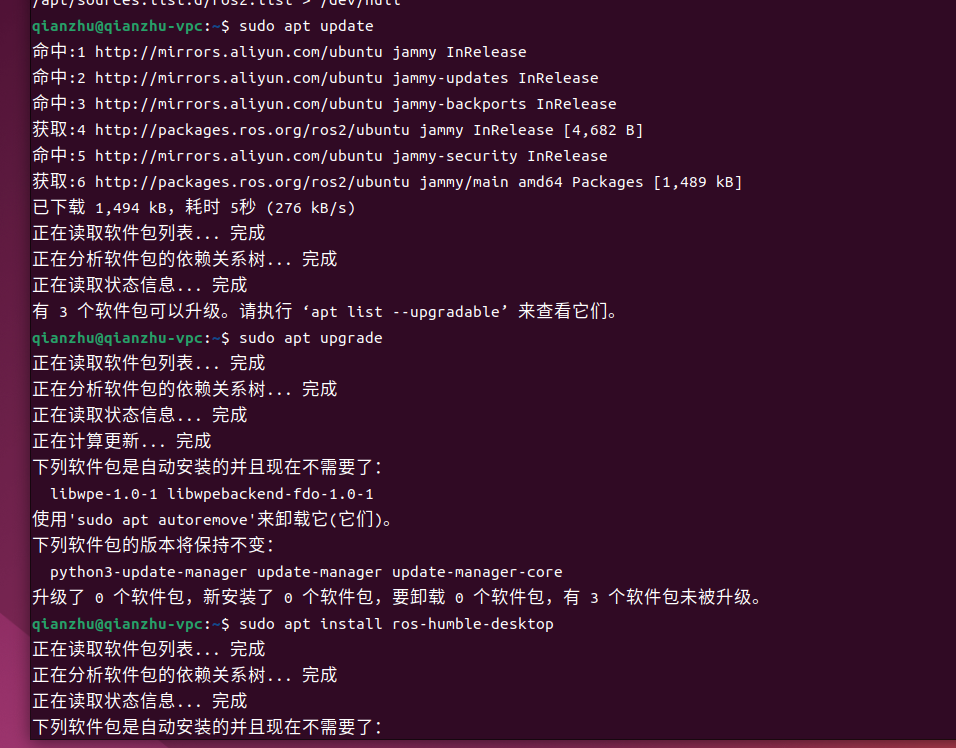
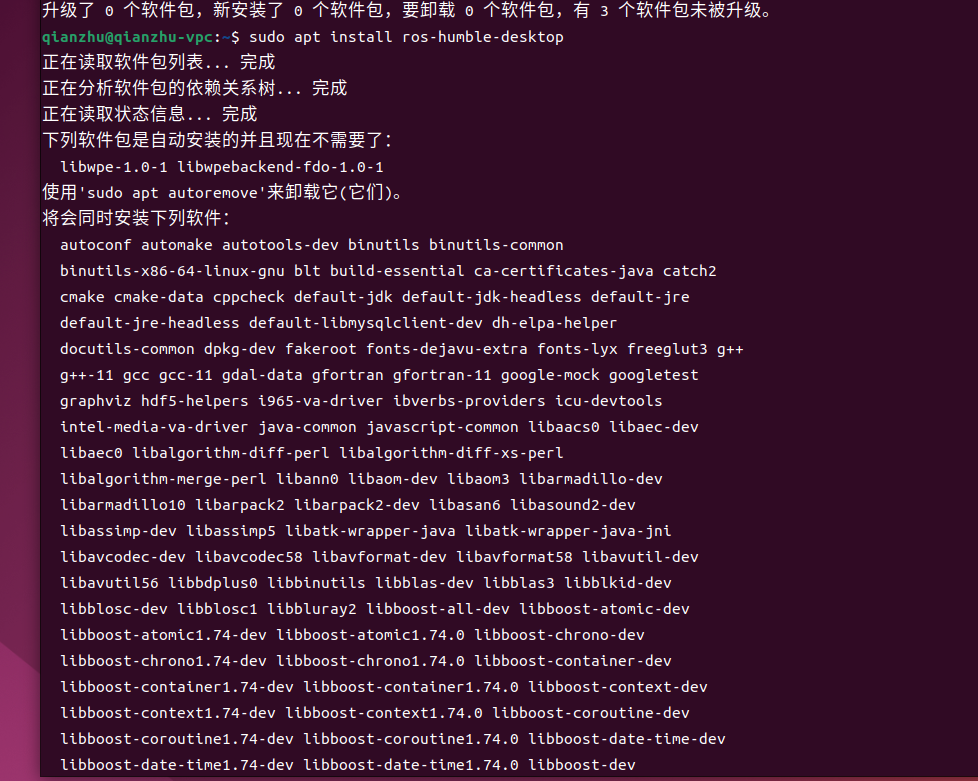
反正一大串的下完就完了;
等待下载完成继续执行如下操作:
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
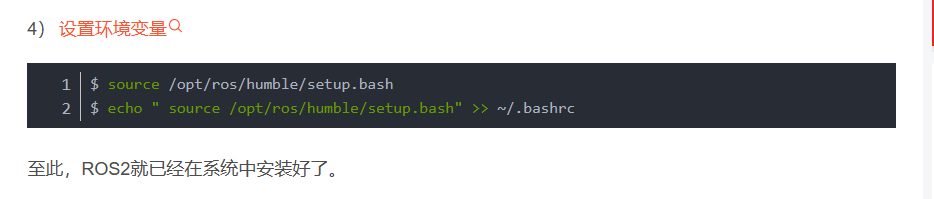
设置完环境变量下面就是测试环节了:
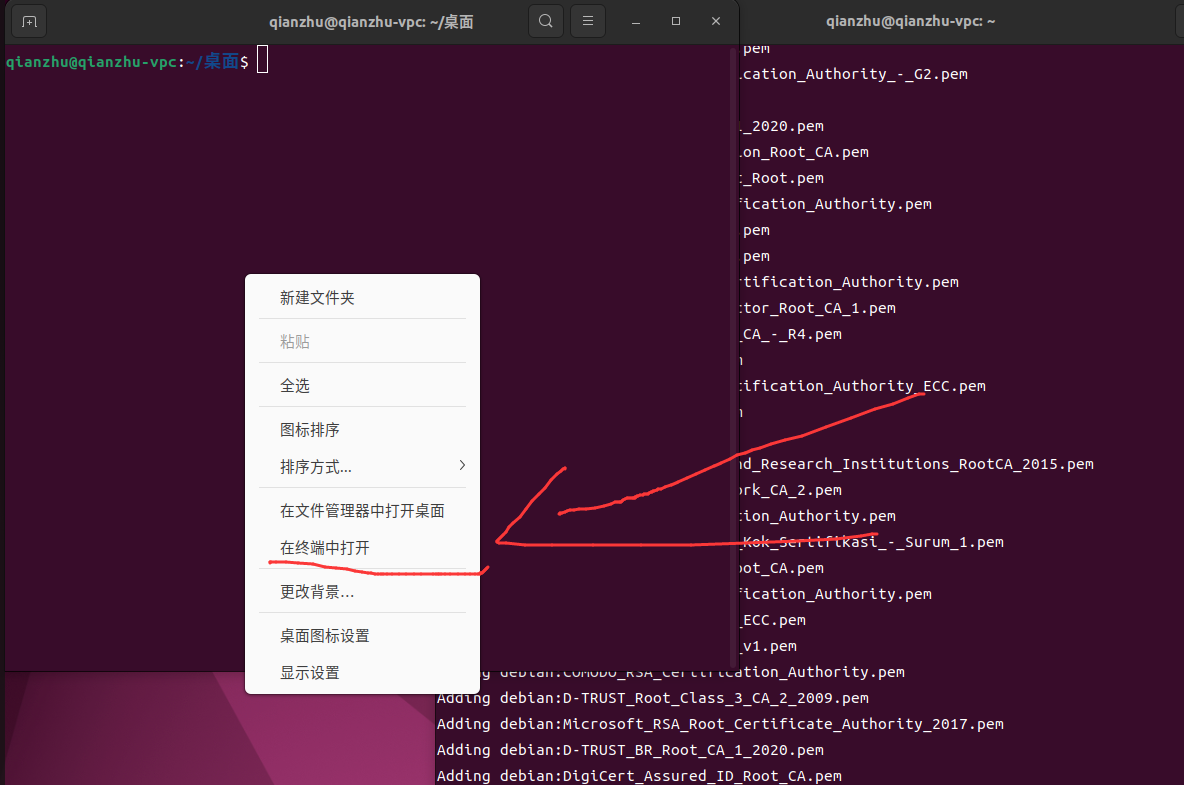
注意需要再打开一个终端,具体操作就是不关第一个终端,回到虚拟机屏幕页面右键点击终端即可,如下 图:
接下来在一个终端输入:
ros2 run demo_nodes_cpp talker
在另外一个终端输入:
ros2 run demo_nodes_py listener
两个终端反应如下:
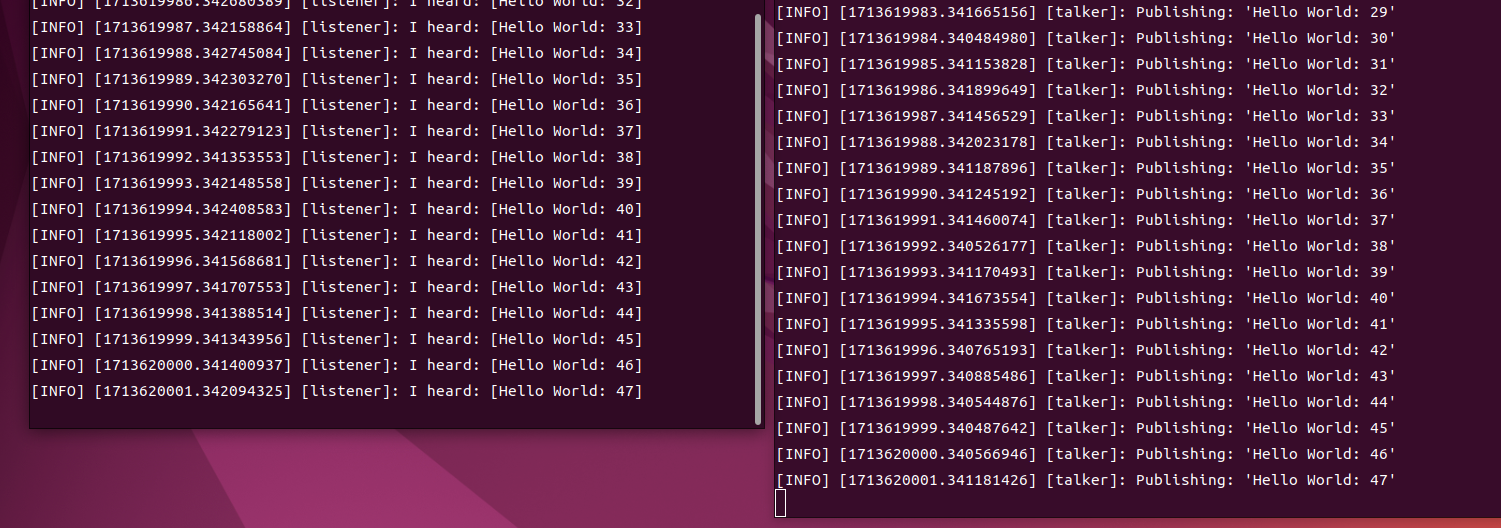
输入ctrl+z即可停止运行;
第二个测试:
一个终端输入:
ros2 run turtlesim turtlesim_node
另一个终端输入:
ros2 run turtlesim turtle_teleop_key
反应如下:
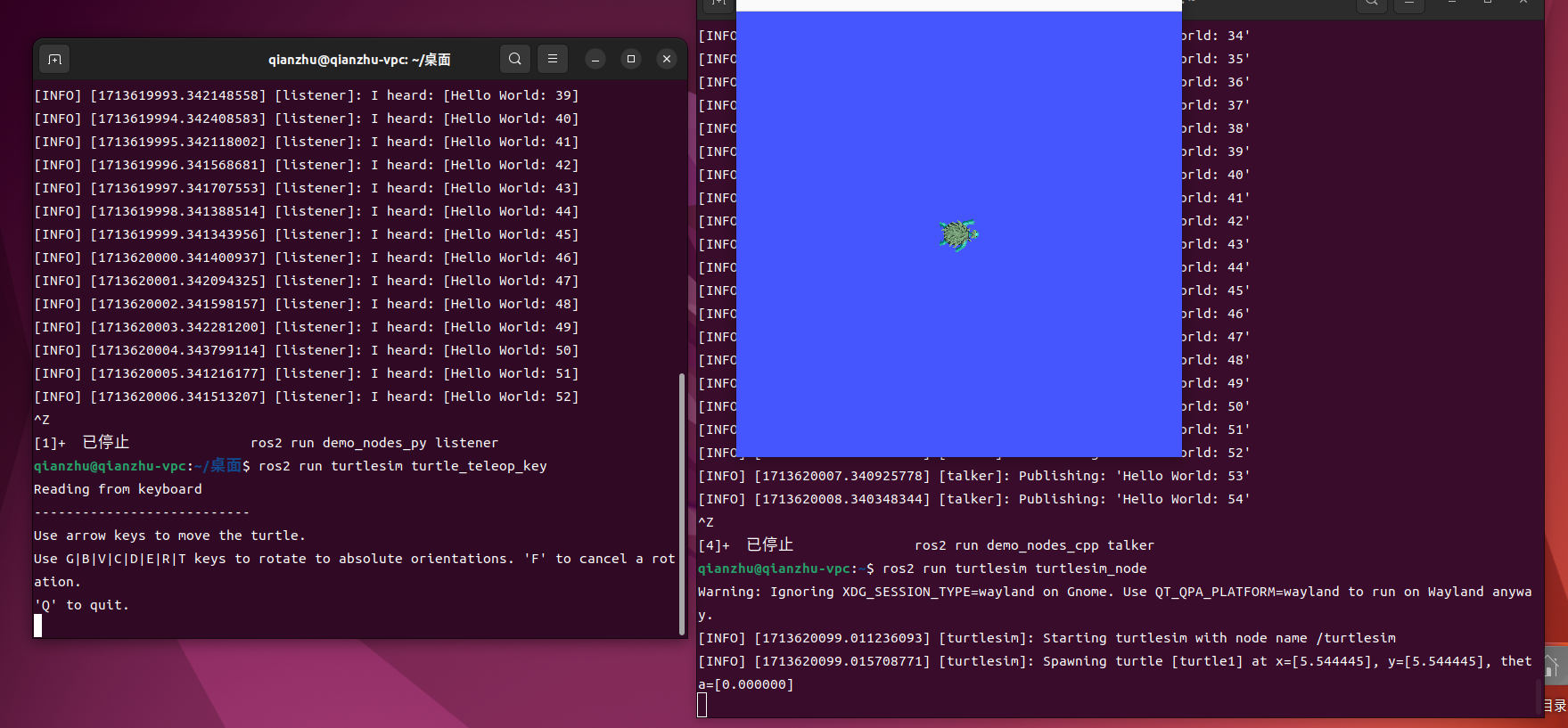
输入第二个代码的终端有说明根据键盘控制海龟的运行,同时使用键盘右半盘的上下左右箭头运动海龟运动也行;

至此完成调试;
写这篇文章是因为发现网上这个22.04版本ROS安装教程很少,而且查得到的安装的时候都出现了bug,为了大家的方便,在安装好ROS后第一时间将安装坑点与教程重新编写了一次,希望大家不要在这里浪费太多时间,把饭喂到大家嘴边。中间还有一些代码我没运行的可能运行了也会有些bug存在,希望如果有bug后来者可以及时补充,减少时间的浪费。
Ubuntu22.04版本安装对应版本ROS教程 (小白2024年)的更多相关文章
- Ubuntu16.04下安装多版本cuda和cudnn
Ubuntu16.04下安装多版本cuda和cudnn 原文 https://blog.csdn.net/tunhuzhuang1836/article/details/79545625 前言 因为之 ...
- mysql 5.7以上版本安装配置方法图文教程(mysql 5.7.12\mysql 5.7.13\mysql 5.7.14)(转)
http://www.jb51.net/article/90302.htm ******************************* 这篇文章主要为大家分享了MySQL 5.7以上缩版本安装配置 ...
- 带有pwn环境的Ubuntu22.04快速安装
pwn环境ubuntu22.04快速安装(有克隆vmk) ubuntu更新到了22.04版本,经过本人测试后非常的好(ma)用(fan),该版本和mac很相像,而且用起来也比较丝滑,只不过配置上稍微有 ...
- Ubuntu22.04 KubeSphere 安装K8S集群
Ubuntu22.04 KubeSphere 安装K8S集群_Ri0n的博客-CSDN博客 一.系统环境系统:Ubuntu 22.04集群IP分布hostname 角色 IP地址master mast ...
- Ubuntu16.04下安装最新版本的CMake
当前最新版CMake为3.9.1.. Ubuntu中更新cmake到最新版本,过程如下: 1. 卸载已经安装的旧版的CMake[非必需] apt-get autoremove cmake 2. 文 ...
- Ubantu 14.04下安装高版本cmake
Ubantu14.04 下自带的cmake版本比较低(默认为2.8),这里我们从源码编译高版本cmake: 先卸载电脑上安装的cmake (如何已安装的话): sudo apt-get autorem ...
- MySQL8.0.x 版本安装步骤傻瓜式教程【官方版】
MySQL8.0.x 安装 一.下载 MySQL官网下载链接:https://downloads.mysql.com/archives/community/ 选择版本后下载zip文件 博主选择的是8. ...
- Ubuntu 16.04 上安装 MySQL 5.7 教程
介绍 MySQL 是一种开源数据库管理系统,通常作为流行的LAMP(Linux,Apache,MySQL,PHP / Python / Perl)堆栈的一部分安装.它使用关系数据库和SQL(结构化查询 ...
- VSCode 安装以及初步使用教程
老样子先介绍一下VSCode(是什么?干什么?有什么用?好处是什么?等) VisualStudioCode(简称VSCode)是Microsoft开发的代码编辑器,它支持Windows,Linux和m ...
- Caffe学习笔记2--Ubuntu 14.04 64bit 安装Caffe(GPU版本)
0.检查配置 1. VMWare上运行的Ubuntu,并不能支持真实的GPU(除了特定版本的VMWare和特定的GPU,要求条件严格,所以我在VMWare上搭建好了Caffe环境后,又重新在Windo ...
随机推荐
- vscode vue 组件定位插件 webpack-code-inspector-plugin -- 强烈推荐 Alt+Shift+鼠标左键
作用 alt + shift + 鼠标左键 自动跳转 vscode项目的组件代码 项目地址 https://github.com/zh-lx/code-inspector/blob/main/pack ...
- manjaro安装微信deepin-wine-wechat后启动不了
直接将主目录下载的 .deepinwine 删除! 随后,点击图标,重新安装!
- 使用ScottPlot库在.NET WinForms中快速实现大型数据集的交互式显示
前言 在.NET应用开发中数据集的交互式显示是一个非常常见的功能,如需要创建折线图.柱状图.饼图.散点图等不同类型的图表将数据呈现出来,帮助人们更好地理解数据.发现规律,并支持决策和沟通.本文我们将一 ...
- 麦克风阵列技术-beaforming开源算法源码分析
概述 在音频前端处理算法中,beamforming算法是一个无法绕过的存在,随着AI技术的广泛发展,前端语音技术的需求也在呈现个性化的动态范围.作为一个深耕音频算法多年的老兵,发现站在巨人的肩膀上 ...
- YAML语法入门
Ansible是一个系列文章,我会尽量以通俗易懂.诙谐幽默的总结方式给大家呈现这些枯燥的知识点,让学习变的有趣一些. Ansible系列博文直达链接:Ansible入门系列 前言 在学习playboo ...
- django项目(博客一)
一 项目开发流程 1.需求 分析架构师+产品经理+开发者组长 在跟客户谈需求之前,会大致先了解客户的需求,然后自己先设计一套比较好的方案 在跟客户沟通交流中引导客户往我们之前想好的方案上面靠 形成一个 ...
- SQL奇遇记:解锁 SQL 的秘密
数据库基础 在我们探究SQL语言之旅的起点,首先要对数据库的核心理念有所了解.数据库在现代生活中无处不在,每次网购.网页浏览.即时通讯,都在产生数据.简单来说,数据库就是按一定数据结构组织.存储.管理 ...
- 工作记录:8个有用的JS技巧
这里给大家分享我最近学习到的8个有用的js小技巧,废话不多说,我们上代码 1. 确保数组值 使用 grid ,需要重新创建原始数据,并且每行的列长度可能不匹配, 为了确保不匹配行之间的长度相等,可以使 ...
- 记录--JS原型链
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 引子 对于初学者学习原型链,还是有很大的困难.一方面是函数与对象分不太清楚:另一方面,不懂原型链的继承等.本人曾今也深受困惑,并且把疑惑的 ...
- 英语文档阅读之Zynq-7000 All Programmable SoC
Read "Zynq-7000 All programmable Soc" 1.Table of Contents 首先是目录,可以看到是标准的总分结构.开头介绍了Zynq的各种功 ...