Openwrt:基于MT7628/MT7688的PWM驱动
前言
MT7628/MT7688的PWM驱动相关资料较少,官方的datasheet基本也是一堆寄存器,啃了许久,终于嚼出了味道。由于PWM存在IO口复用的问题,所以要提前配置好GPIO的工作方式,不然你无论怎么掐示波器,都不会出现预计的波形。由于MT7688和MT7628是pin to pin,几乎完全兼容,除了MT7628是2T2R而MT7688是1T1R这个区别,在PWM的设置上是相同,所以MT7688也可以直接参考MT7628的编程手册。
寄存器
pwm复用关系
MT7688最多支持四路PWM,分别是pwm_ch0、pwm_ch1、pwm_ch2、pwm_ch3,从MT7688的pin map可知:
- pwm_ch0、pwm_ch1复用在PAD_MDI_TP_P1和PAD_MDI_TN_P1上,也就是网口1的传输线,再往下看,pwm_ch0、pwm_ch1还复用在txd1、rxd1上,这是串口1;
- pwm_ch2、pwm_ch3复用在PAD_MDI_TP_P2和PAD_MDI_TN_P2上,也就是网口2;
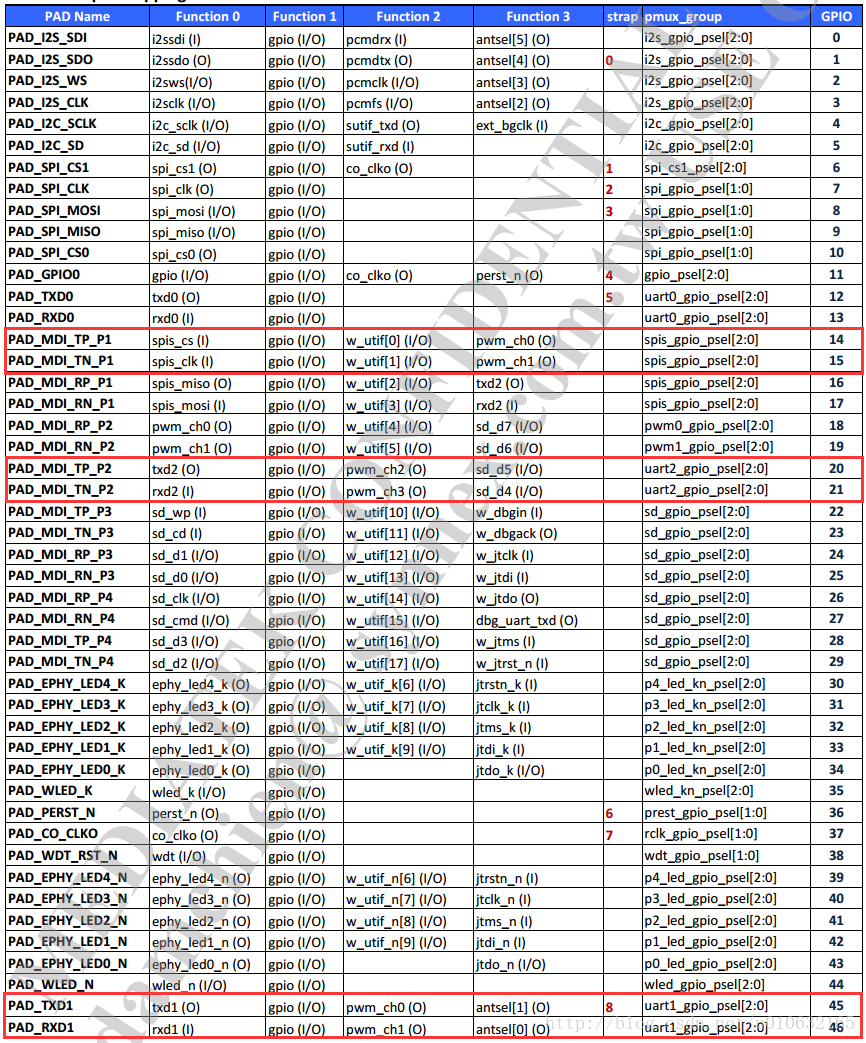
由上面如果既要使用网口1的功能,又要使用pwm_ch0、pwm_ch1的功能,那么必须复用到txd1和rxd1上才可以,因为系统默认GPIO14、15的功能是网口1,而GPIO45、46的功能是串口1,所以这里还需对GPIO的模式进行配置,同理pwm_ch2、pwm_ch3也需要进行类似的配置。
gpio mode
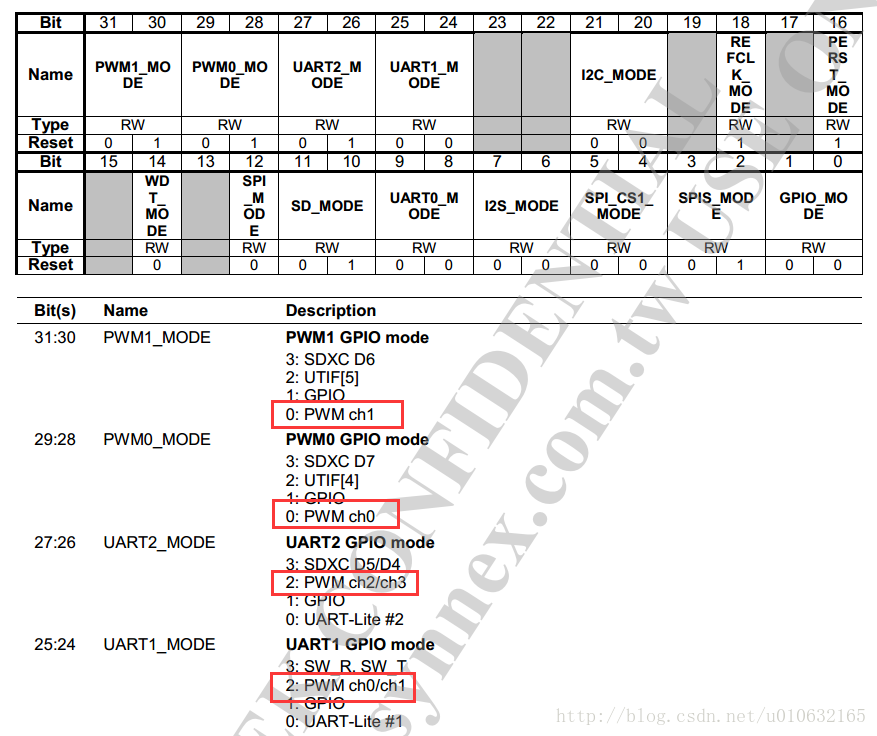
选择那几路pwm做为这几个GPIO的功能则需要配置GPIO_MODE寄存器了,由下图可知,GPIO被分为两组,分别为GPIO1与GPIO2,寄存器地址分别为10000060和10000064这在后面驱动编写对GPIO进行初始化的时候会用到。

下图是GPIO1的寄存器配置方式,在此可知,对于PWM的选择只需配置相应的Bit即可。不同的模式通过不同的值进行选择。
代码
以下驱动代码参考了小鱼儿专栏的博文,做了部分修改,修复了几处错误,经测试可以使用。
mt7688_pwm.c
#include <linux/kernel.h>
#include <linux/version.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/irq.h>
#include <asm/uaccess.h>
#include <asm/irq.h>
#include <asm/io.h>
#include <linux/module.h>
#include <linux/device.h>
#include <linux/cdev.h>
#include <linux/interrupt.h>
#include <linux/sched.h>
#include <linux/wait.h>
#include <linux/poll.h>
#include <linux/fcntl.h>
#include <linux/spinlock.h>
#include "mt7688_pwm.h"
MODULE_LICENSE("GPL");
#define RALINK_CLK_CFG 0xB0000030
#define RALINK_AGPIO_CFG 0xB000003C
#define RALINK_GPIOMODE 0xB0000060
#define RALINK_PWM_BASE 0xB0005000
//#define RALINK_CLK_CFG 0x10000030
//#define RALINK_AGPIO_CFG 0x1000003C
//#define RALINK_GPIOMODE 0x10000060
//#define RALINK_PWM_BASE 0x10005000
#define RALINK_PWM_ENABLE RALINK_PWM_BASE
#define PWM_MODE_BIT 15
#define PWM_GVAL_BIT 8
#define PWM_IVAL_BIT 7
enum {
PWM_REG_CON,
PWM_REG_GDUR = 0x0C,
PWM_REG_WNUM = 0x28,
PWM_REG_DWID = 0x2C,
PWM_REG_THRE = 0x30,
PWM_REG_SNDNUM = 0x34,
}PWM_REG_OFF;
#define PWM_NUM 4
u32 PWM_REG[PWM_NUM] = {
(RALINK_PWM_BASE + 0x10), /* pwm0 base */
(RALINK_PWM_BASE + 0x50), /* pwm1 base */
(RALINK_PWM_BASE + 0x90), /* pwm2 base */
(RALINK_PWM_BASE + 0xD0) /* pwm3 base */
};
#define NAME "sooall_pwm"
int pwm_major;
int pwm_minor = 0;
int pwm_device_cnt = 1;
struct cdev pwm_cdev;
static struct class *pwm_class;
static struct device *pwm_device;
spinlock_t pwm_lock;
static void sooall_pwm_cfg(struct pwm_cfg *cfg)
{
u32 value;
unsigned long flags;
u32 basereg;
basereg = PWM_REG[cfg->no];
spin_lock_irqsave(&pwm_lock, flags);
/* 1. set the pwm control register */
value = le32_to_cpu(*(volatile u32 *)(basereg + PWM_REG_CON));
/* old mode */
value |= (1 << PWM_MODE_BIT);
/* set the idel val and guard val */
value &= ~((1 << PWM_IVAL_BIT) | (1 << PWM_GVAL_BIT));
value |= ((cfg->idelval & 0x1) << PWM_IVAL_BIT);
value |= ((cfg->guardval & 0x1) << PWM_GVAL_BIT);
/* set the source clk */
if (cfg->clksrc == PWM_CLK_100KHZ) {
value &= ~(1<<3);
} else {
value |= (1<<3);
}
/* set the clk div */
value &= ~0x7;
value |= (0x7 & cfg->clkdiv);
*(volatile u32 *)(basereg + PWM_REG_CON) = cpu_to_le32(value);
/* 2. set the guard duration val */
value = le32_to_cpu(*(volatile u32 *)(basereg + PWM_REG_GDUR));
value &= ~(0xffff);
value |= (cfg->guarddur & 0xffff);
*(volatile u32 *)(basereg + PWM_REG_GDUR) = cpu_to_le32(value);
/* 3. set the wave num val */
value = le32_to_cpu(*(volatile u32 *)(basereg + PWM_REG_WNUM));
value &= ~(0xffff);
value |= (cfg->wavenum & 0xffff);
*(volatile u32 *)(basereg + PWM_REG_WNUM) = cpu_to_le32(value);
/* 4. set the data width val */
value = le32_to_cpu(*(volatile u32 *)(basereg + PWM_REG_DWID));
value &= ~(0x1fff);
value |= (cfg->datawidth & 0x1fff);
*(volatile u32 *)(basereg + PWM_REG_DWID) = cpu_to_le32(value);
/* 5. set the thresh val */
value = le32_to_cpu(*(volatile u32 *)(basereg + PWM_REG_THRE));
value &= ~(0x1fff);
value |= (cfg->threshold & 0x1fff);
*(volatile u32 *)(basereg + PWM_REG_THRE) = cpu_to_le32(value);
spin_unlock_irqrestore(&pwm_lock, flags);
}
static void sooall_pwm_enable(int no)
{
u32 value;
unsigned long flags;
printk(KERN_INFO NAME "enable pwm%d\n", no);
spin_lock_irqsave(&pwm_lock, flags);
value = le32_to_cpu(*(volatile u32 *)(RALINK_PWM_ENABLE));
value |= (1 << no);
*(volatile u32 *)(RALINK_PWM_ENABLE) = cpu_to_le32(value);
spin_unlock_irqrestore(&pwm_lock, flags);
}
static void sooall_pwm_disable(int no)
{
u32 value;
unsigned long flags;
printk(KERN_INFO NAME "disable pwm%d\n", no);
spin_lock_irqsave(&pwm_lock, flags);
value = le32_to_cpu(*(volatile u32 *)(RALINK_PWM_ENABLE));
value &= ~(1 << no);
*(volatile u32 *)(RALINK_PWM_ENABLE) = cpu_to_le32(value);
spin_unlock_irqrestore(&pwm_lock, flags);
}
static void sooall_pwm_getsndnum(struct pwm_cfg *cfg)
{
u32 value;
unsigned long flags;
u32 regbase = PWM_REG[cfg->no];
spin_lock_irqsave(&pwm_lock, flags);
value = le32_to_cpu(*(volatile u32 *)(regbase + PWM_REG_SNDNUM));
cfg->wavenum = value;
spin_unlock_irqrestore(&pwm_lock, flags);
}
#if LINUX_VERSION_CODE > KERNEL_VERSION(2,6,35)
long sooall_pwm_ioctl(struct file *file, unsigned int req,
unsigned long arg)
#else
int sooall_pwm_ioctl(struct inode *inode, struct file *file, unsigned int req,
unsigned long arg)
#endif
{
switch (req) {
case PWM_ENABLE:
sooall_pwm_enable(((struct pwm_cfg *)arg)->no);
break;
case PWM_DISABLE:
sooall_pwm_disable(((struct pwm_cfg *)arg)->no);
break;
case PWM_CONFIGURE:
sooall_pwm_cfg((struct pwm_cfg *)arg);
break;
case PWM_GETSNDNUM:
sooall_pwm_getsndnum((struct pwm_cfg *)arg);
break;
default:
return -ENOIOCTLCMD;
}
return 0;
}
static int sooall_pwm_open(struct inode * inode, struct file * filp)
{
return 0;
}
static int sooall_pwm_close(struct inode *inode, struct file *file)
{
return 0;
}
static const struct file_operations pwm_fops = {
.owner = THIS_MODULE,
#if LINUX_VERSION_CODE > KERNEL_VERSION(2,6,35)
unlocked_ioctl:sooall_pwm_ioctl,
#else
ioctl:sooall_pwm_ioctl,
#endif
.open = sooall_pwm_open,
.release = sooall_pwm_close,
};
static int setup_chrdev(void)
{
dev_t dev;
int err = 0;
if (pwm_major) {
dev = MKDEV(pwm_major, 0);
err = register_chrdev_region(dev, pwm_device_cnt, NAME);
} else {
err = alloc_chrdev_region(&dev, 0, pwm_device_cnt, NAME);
pwm_major = MAJOR(dev);
}
if (err < 0) {
printk(KERN_ERR NAME "get device number failed\n");
return -1;
}
cdev_init(&pwm_cdev, &pwm_fops);
pwm_cdev.owner = THIS_MODULE;
pwm_cdev.ops = &pwm_fops;
err = cdev_add(&pwm_cdev, dev, pwm_device_cnt);
if (err < 0) {
printk(KERN_ERR NAME "cdev_add failed\n");
unregister_chrdev_region(dev, pwm_device_cnt);
return -1;
}
return 0;
}
static void clean_chrdev(void)
{
dev_t dev = MKDEV(pwm_major, 0);
cdev_del(&pwm_cdev);
unregister_chrdev_region(dev, pwm_device_cnt);
}
static void setup_gpio(void)
{
u32 value;
int i = 0;
/* pwm0 pwm1 */
/* enable the pwm clk */
value = le32_to_cpu(*(volatile u32 *)(RALINK_CLK_CFG));
value |= (1 << 31);
*(volatile u32 *)(RALINK_CLK_CFG) = cpu_to_le32(value);
/* set the agpio cfg of ephy_gpio_aio_en */
//value = le32_to_cpu(*(volatile u32 *)(RALINK_AGPIO_CFG));
//value |= (0xF<<17);
//*(volatile u32 *)(RALINK_AGPIO_CFG) = cpu_to_le32(value);
/* set the pwm mode */
//value = le32_to_cpu(*(volatile u32 *)(RALINK_GPIOMODE));
//value &= ~(3 << 28 | 3 << 30);
//*(volatile u32 *)(RALINK_GPIOMODE) = cpu_to_le32(value);
value = le32_to_cpu(*(volatile u32 *)(RALINK_GPIOMODE));
value |= (2 << 24);
*(volatile u32 *)(RALINK_GPIOMODE) = cpu_to_le32(value);
/* disable all the pwm */
for (i = 0; i < PWM_NUM; i++) {
sooall_pwm_disable(i);
}
}
static int sooall_pwm_init(void)
{
int ret = 0;
spin_lock_init(&pwm_lock);
ret = setup_chrdev();
if (ret < 0)
return -1;
pwm_class = class_create(THIS_MODULE, NAME);
if (NULL == pwm_class) {
printk(KERN_ERR NAME "class_create failed\n");
goto dev_clean;
}
pwm_device = device_create(pwm_class, NULL,
MKDEV(pwm_major, pwm_minor), NULL, "sooall_pwm");
if (NULL == pwm_device) {
printk(KERN_ERR NAME "device_create failed\n");
goto class_clean;
}
setup_gpio();
printk(KERN_INFO "sooall pwm init success\n");
return 0;
class_clean:
class_destroy(pwm_class);
dev_clean:
clean_chrdev();
return -1;
}
static void sooall_pwm_exit(void)
{
device_destroy(pwm_class, MKDEV(pwm_major, pwm_minor));
class_destroy(pwm_class);
clean_chrdev();
printk(KERN_INFO "sooall pwm exit\n");
}
module_init(sooall_pwm_init);
module_exit(sooall_pwm_exit);
mt7688_pwm.h
#ifndef _SOOALL_PWM_H_
#define _SOOALL_PWM_H_
/* the source of the clock */
typedef enum {
PWM_CLK_100KHZ,
PWM_CLK_40MHZ
}PWM_CLK_SRC;
/* clock div */
typedef enum {
PWM_CLI_DIV0 = 0,
PWM_CLK_DIV2,
PWM_CLK_DIV4,
PWM_CLK_DIV8,
PWM_CLK_DIV16,
PWM_CLK_DIV32,
PWM_CLK_DIV64,
PWM_CLK_DIV128,
}PWM_CLK_DIV;
struct pwm_cfg {
int no;
PWM_CLK_SRC clksrc;
PWM_CLK_DIV clkdiv;
unsigned char idelval;
unsigned char guardval;
unsigned short guarddur;
unsigned short wavenum;
unsigned short datawidth;
unsigned short threshold;
};
/* ioctl */
#define PWM_ENABLE 0
#define PWM_DISABLE 1
#define PWM_CONFIGURE 2
#define PWM_GETSNDNUM 3
#endif
How to use it?
下载源码
压缩包中包含两个压缩包分别是mt7688_pwm.tar.gz、mt7688_pwm_app.tar.gz,驱动和测试程序。
并解压缩到openwrt 15.01 SDK的Package/下。进行编译即可。
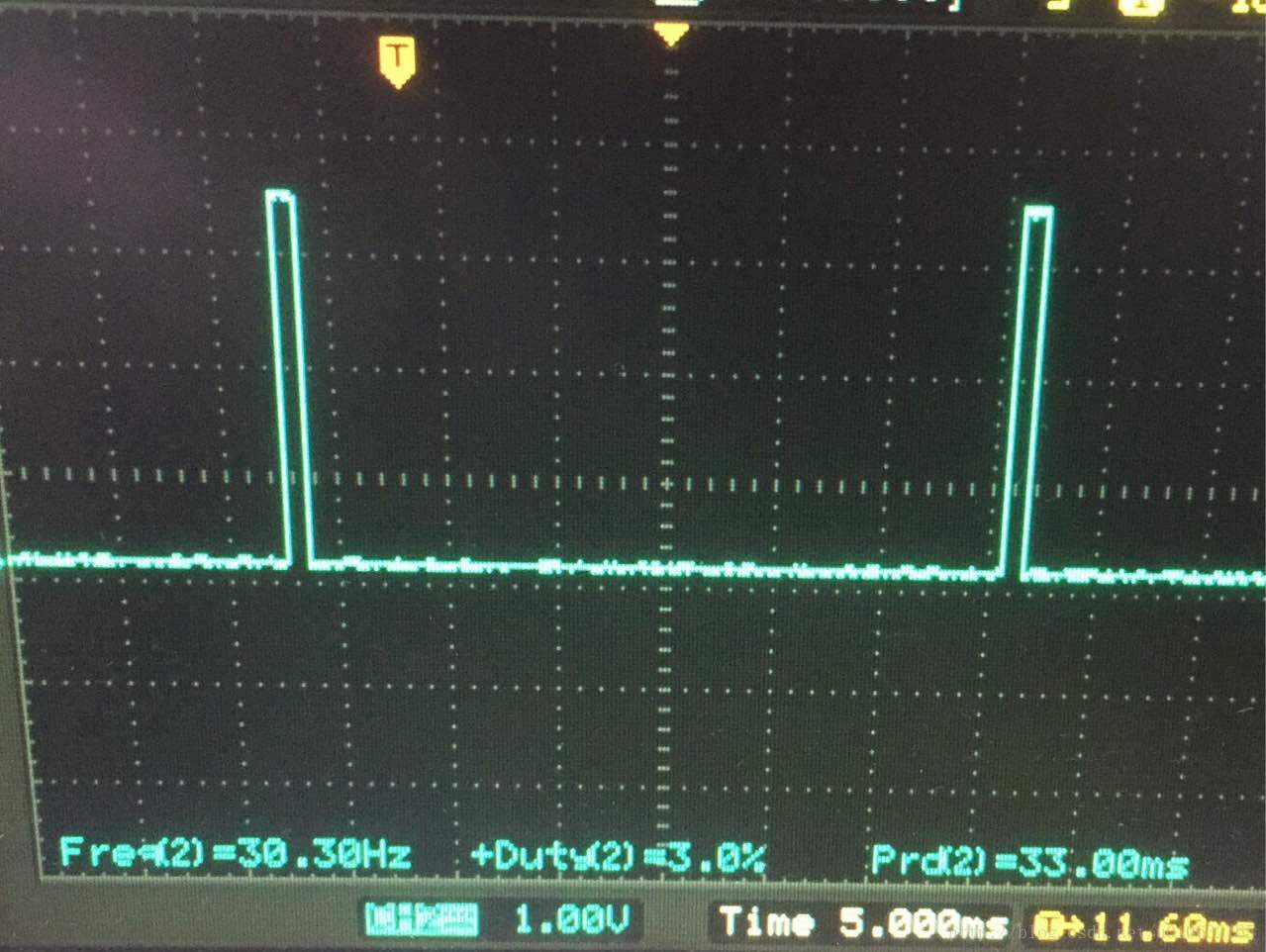
最后附一张成功的图片^_^
Openwrt:基于MT7628/MT7688的PWM驱动的更多相关文章
- 基于ARM-contexA9-蜂鸣器pwm驱动开发
上次,我们写过一个蜂鸣器叫的程序,但是那个程序仅仅只是驱动蜂鸣器,用电平1和0来驱动而已,跟驱动LED其实没什么两样.我们先来回顾一下蜂鸣器的硬件还有相关的寄存器吧: 还是和以前一样的步骤: 1.看电 ...
- Linux系统PWM驱动【转】
本文转载自:https://blog.csdn.net/BorntoX/article/details/51879786 硬件平台:IMX6 内核版本:kernel3.0.35 在linux内核中有一 ...
- 基于Mongodb的轻量级领域驱动框架(序)
混园子也有些年头了,从各个大牛那儿学了很多东西.技术这东西和中国的料理一样,其中技巧和经验,代代相传(这不是舌尖上的中国广告).转身回头一望,几年来自己也积累了一些东西,五花八门涉猎到各种方向,今日开 ...
- 基于335X的UBOOT网口驱动分析
基于335X的UBOOT网口驱动分析 一.软硬件平台资料 1. 开发板:创龙AM3359核心板,网口采用RMII形式 2. UBOOT版本:U-Boot-2016.05,采用FDT和DM. 参考链 ...
- linux驱动编写(pwm驱动)【转】
本文转载自:https://blog.csdn.net/feixiaoxing/article/details/79889240 pwm方波可以用来控制很多的设备,比如它可以被用来控制电机.简单来说, ...
- 基于STM32F4移植W5500官方驱动库ioLibrary_Driver(转)
源: 基于STM32F4移植W5500官方驱动库ioLibrary_Driver 参考: 基于STM32+W5500 的Ethernet和Internet移植 Upgrade W5500 Throug ...
- linux驱动开发—基于Device tree机制的驱动编写
前言Device Tree是一种用来描述硬件的数据结构,类似板级描述语言,起源于OpenFirmware(OF).在目前广泛使用的Linux kernel 2.6.x版本中,对于不同平台.不同硬件,往 ...
- 基于S3C2440的嵌入式Linux驱动——看门狗(watchdog)驱动解读
本文将介绍看门狗驱动的实现. 目标平台:TQ2440 CPU:s3c2440 内核版本:2.6.30 1. 看门狗概述 看门狗其实就是一个定时器,当该定时器溢出前必须对看门狗进行"喂狗“,如 ...
- 基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl 0. 导语 在嵌入式的道路上寻寻觅觅很久,进入嵌入式这个行业也有几年的时间了,从2011年后 ...
随机推荐
- D. Feeding Chicken(构造)
题目大意:将k个鸡放到一个n*m的矩阵中,要求每个鸡所占的rice的个数只差最小 题解:构造,设一共有cnt个rice,可以分cnt/k个,即每一只鸡要么占用cnt/k个rice,要么占cnt/k+1 ...
- BUUOJ Misc刷题大作战
你竟然赶我走 随便一个txt文件都可以拿 LSB 当然还有别的,根据里面左右左右变化,在0管道有变化,然后把下面的三个0打钩,导出png,一个二维码,扫出来 乌镇峰会种图 只要会用winhex打开文件 ...
- java-锁膨胀的过程
先来看个奇怪的demo public class A { int i=0; // boolean flag =false; public synchronized void parse(){ i++; ...
- Linux学习笔记(九)Vim文本编辑器的使用
Vim文本编辑器的使用 Vim的工作模式 1.命令模式 2.输入模式 3.编辑模式 进入Vim 1.使用Vim打开文件 2.直接进入指定位置 Vim基本命令 1.插入命令 2.光标移动命令 3.使用V ...
- Spring Cloud Gateway+Nacos,yml+properties两种配置文件方式搭建网关服务
写在前面 网关的作用不在此赘述,举个最常用的例子,我们搭建了微服务,前端调用各服务接口时,由于各服务接口不一样,如果让前端同事分别调用,前端同事会疯的.而网关就可以解决这个问题,网关屏蔽了各业务服务的 ...
- 异常处理方式一(try-catch-finally)
package com.yhqtv.demo01Exception; /* * 一.异常的处理,抓抛模型 * * 过程一:“抛”:程序在正常 执行的过程中,一旦出现异常,就会在异常代码处生成一个对应异 ...
- redis管道操作(事务),无回滚
管道:将数据操作放在内存中,只有成功后,才会一次性全部放入redis #管道(事务),要是都成功则成功,失败一个全部失败 #原理:将数据操作放在内存中,只有成功后,才会一次性全部放入redis pip ...
- 有关HTTP协议
有关HTTP协议:https://www.cnblogs.com/an-wen/p/11180076.html
- Programmatically mount a Microsoft Virtual Hard Drive (VHD)
By Pixy https://stackoverflow.com/questions/24396644/programmatically-mount-a-microsoft-virtual-hard ...
- LVS DR模式实验
LVS DR模式实验 三台虚拟机,两个台节点机(Apache),一台DR实验调度机 一:关闭相关安全机制 systemctl stop firewalld iptables -F setenforce ...