从5个经典工作开始看语义SLAM
本文试图概括Semantic SLAM的主要思路和近年工作,⻓期更新。但因水平有限,若有错漏,感谢指正。
(更好的公式显示效果,可关注文章底部的公众号)
Semantic SLAM
简介
至今为止,主流的 SLAM 方案 [1] 基于处于像素层级的特征点,更具体地,它们往往只能用角点或边缘来提取路标。人类是通过物体在图像中的运动来推测相机的运动,而非特定像素点。
Semantic SLAM 是研究者试图利用物体信息的方案,其在Deep Learning的推动下有了较大的发展,成为了相对独立的分支,就方法(非设备)而言,其在整个SLAM领域所处位置如下图:

目前而言,所谓 Semantic 是将基于神经网络的语义分割、目标检测、实例分割等技术用于 SLAM 中,多用于特征点选取、相机位姿估计,更广泛地说,端到端的图像到位姿、从分割结果建标记点云、场景识别、提特征、做回环检测等使用了神经网络的方法都可称为 Semantic SLAM [2]。
语义和 SLAM 的结合的体现有以下两点 [3]:
SLAM 帮助语义。
检测和分割任务都需要大量的训练数据,在 SLAM 中,由于我们可以估计相机的运动,那么各个物体在图像中位置的变化也可以被预测出来,产生大量的新数据为语义任务提供更多优化条件,且节省人工标定的成本。
语义帮助 SLAM。
一方面,语义分割把运动过程中的每一张图片都带上语义标签,随后传统 SLAM 将带标签的像素映射到3D空间中,就能得到一个带有标签的地图。这提供了高层次的地图,有利于机器人自主理解和人机交互。
另一方面,语义信息亦可为回环检测、Bundle Adjustment 带来更多的优化条件,提高定位精度。
仅实现前者的工作往往称为 Semantic Mapping,后者才认为是真正的 Semantic SLAM。
发展方向
分别从 Semantic Mapping 和 Real Semantic SLAM 两方面,介绍一些主要思路。
Semantic Mapping
这类工作要求特征点是 dense 或 semi-dense 的(否则 Mapping 无意义),因此往往用 RGB-D 的 SLAM 方案,亦或是单目相机的 semi-dense LSD-SLAM 方案 [4]。
有两种 Mapping 方式:
将2D图像的语义分割结果,即带标签的像素,映射到3D点云中。
研究人员尝试让 SLAM 所得的信息(特别是相机位姿),能够提高语义分割的性能。其中一种是使用 SemanticFusion [5] 的 Recursive Bayes 方法:根据 SLAM 对像素点运动的估计,当前帧的像素的语义分类概率 与 前一帧旧位置上的分类概率相乘作为最终概率,即像素的概率会沿着各帧累乘,因而增强语义分割的结果。
这一方法被基于单目相机的工作 [6] 沿用,整体框架描述如下。
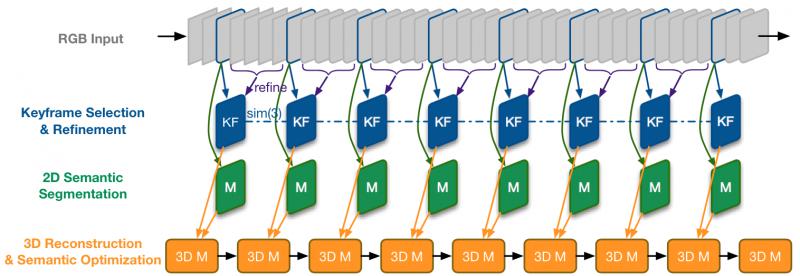
LSD-SLAM + DeepLab-v2 (语义分割)
流程:输入 -> 选关键帧并 refine(非关键帧用于增强深度估计)-> 2D语义分割 -> 语义优化+3D重建
① 为保证速度,仅对关键帧来进行语义分割,
② 其他帧用 small-baseline stereo comparisons [7] 对关键帧做深度估计的优化
③ 使用 Recursive Bayes 增强语义分割
④ 3D重建的优化使用条件随机场(CRF),同 SemanticFusion
第二种 Mapping 方式则以 Object 为单位构建地图 [8][9]。相比于一堆标记了类别的 voxel,包含一个个物体的语义地图,将更有价值。
此部分的重点在于如何做数据关联(Data Association),即跟踪已识别 Object 和发现新 Object,以 [8] 为例描述如下。
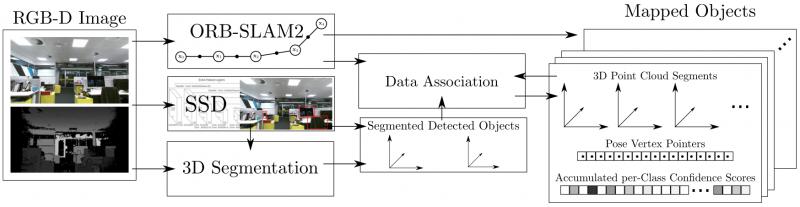
使用 RGB-D 和 ORB-SLAM2 可构建一个 dense 的点云。
对于关键帧,SSD 检测出多个 Object,应用无监督的3D分割方法 [10] 为每一个 Object 分配点云序列,并存储起来。
数据关联:得到一组分割结果(Object, 对应点云)后,据点云重心的欧式距离,在找出最接近的一组候选 Object,如果超过 50% 的点对的距离小于一个阈值(文中 2cm),就认为是匹配到的 Object,否则认为是新 Object,存储下来。
匹配为同一 Object 的两个点云,直接累加分类概率(置信度)。这和上文提到的 Recursive Bayes 方法很像,即利用 SLAM 提供的物体多角度信息,增强分割结果。
(注:本文的 Related Work 写得很好)
Real Semantic SLAM
此部分为本文的重点。相对来说,真正的 Semantic SLAM (即语义建图和 SLAM 定位相互促进)发展较晚(基本是2017年后)。
在 Bundle Adjustment (BA) 方法中,我们同时优化相机位姿和 3D 坐标位置,使得重投影到 2D 图像的像素点与实际观测(多个相机,多个特征点)的总误差最小。
那么如何将语义信息融合进来呢?
思路一:同个 3D 点重投影之后,应保持语义一致。
这又是重投影优化问题,可以加入到 BA 公式中加强优化目标,关键是如何量化重投影误差,就好像传统 BA 的重投影误差通过与实际观测的像素距离来量化。
ICRA 2017 的著名工作 Probabilistic Data Association for Semantic SLAM [11] 使用了此思路,其量化重投影误差的方法在于:使用概率模型计算出来的物体中心,重投影到图像上,应该接近检测框的中心。而数据关联(到底要接近哪个检测框中心),由一组权重决定,最后 “BA” 和 “权重更新” 通过 EM 算法交替优化。
ECCV 2018 上的工作 VSO [12] 与之类似,重投影误差通过与目标类别的语义区域的远近来量化。有几个细节比较巧妙,下面展开说明。
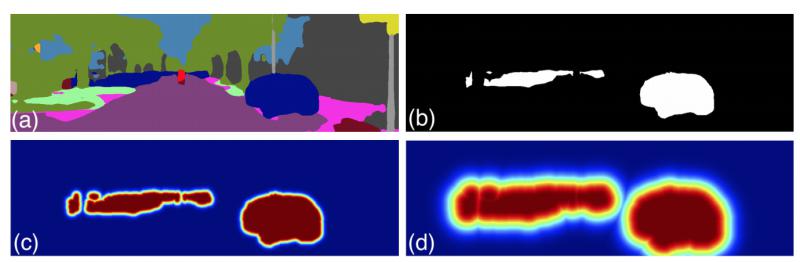
如上图所示,(a) 为语义分割图,(b) 为类别 “Car” 的区域,在(c) (d) 中,根据与 Car 区域的距离,概率值从1 (红) 变为 0 (蓝)。 其他类别如Tree,也会产生此概率分布图。
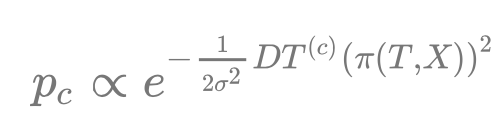
其中 距离 到 概率 的转化,利用了下方的高斯分布,(c) (d) 的不同是方差
导致的。这是在为量化重投影误差做准备。对于一个空间点P(拥有坐标
)来说,重投影之后计算得到一个概率:
其中
计算了重投影的结果
与类别 c 区域的最近距离,最后得到的
用于计算重投影误差:
权重
的存在是为了解决数据关联,即空间点P应该以哪一个类别的区域为目标,
。其由多个相机下的
值累乘,即多个角度观测投票决定。
会加到普通的 BA 优化公式中,使用 EM 算法进行优化,E 步更新权重
,而 M 步优化三维点P坐标和相机位姿(普通的 BA 过程)。
个人理解,之所以使用高斯分布,是因为其函数有“骤降”之处,那么方差
可以起到决定阈值的作用,让距离超过阈值的类别区域更快得到一个小权重
,多个相机的投票下,数据关联很快就能稳定下来,可以加速优化。
(为简化说明,上述公式已被简化,去除了对于多个相机、空间点的索引,详见原文)
思路二:从语义信息可以推断出动态区域。
传统 SLAM 方法几乎都是假设当前场景是静态的,当面对含有运动物体的场景时,运动物体上的特征点将对相机位姿估计产生巨大的偏差。面对这一困难的主要解决方式是去掉这些动态的特征点,而语义分割十分适合找出这些动态区域。
语义分割有两个特点,一是把平面区域的许多像素点联系起来,二是给区域带上了分类标签。
前者有利于确定物体是否真的在运动,因为单个特征点的偏移并不能确定运动的发生(可能是 SLAM 系统一直存在的观测噪声),若是一群有关联的特征点普遍发生了较大的偏移,就可以断定为是动态的。
后者有利于预判物体是否会运动,比如标签是人的区域几乎是动态的,而墙壁则可断定是静态的(甚至不用去计算偏移)。
IROS 2018 的 DS-SLAM [13] 基于第一个特点,以区域为单位判断是否动态,而一些工作如 [14] 仅利用了第二个特点,较为暴力地直接排除某些区域(天空,车)的特征点。
把这两个特点都用上的是 ICRA 2019 的工作 [15], 简述如下。
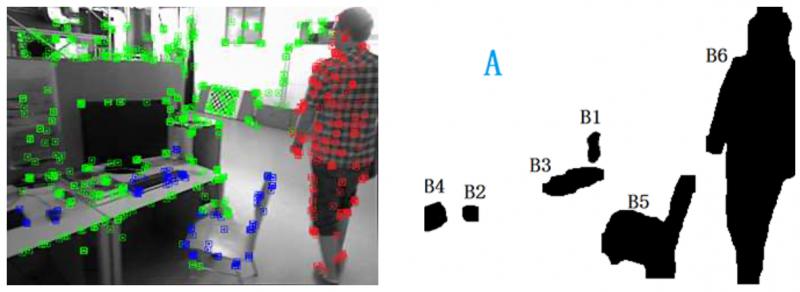
利用语义分割,将一些类别(
)区域定义为背景(绿色),其他类别(
)区域定义为可移动物体。
接下来使用运动判定,以区分可移动物体当前是静止(蓝色)还是运动(红色)的。
运动判定的规则如下:对于某一语义区域内,过往估计的特征点的 3D 位置,投影到当前的新图像上,重投影位置若和对应特征点的欧式距离大于一定阈值,则定义为移动点,如果该区域移动点的比例大于一定阈值则判定为移动区域。
思路三:语义信息提供的物体级别的描述,拥有季节(光线)不变性。
这一思路可以用在如何用已有的 3D 地图定位。
传统的特征点(拥有描述子),在多变的环境下十分不鲁棒,容易跟丢。而语义分割的结果,相对而言是稳定的,此外,若以物体级别来做定位(拿语义标签来匹配地图),更符合人类直觉。
思路四:待总结
更好的阅读效果、更多相关内容可关注公众号 【小林同学的脑回路】↓ ↓ ↓
从5个经典工作开始看语义SLAM的更多相关文章
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- 分享| 语义SLAM的未来与思考(泡泡机器人)
相比典型的点云地图,语义地图能够很好的表示出机器人到的地方是什么,机器人“看”到的东西是什么.比如进入到一个房间,点云地图中,机器人并不能识别显示出来的一块块的点云到底是什么,但是语义地图的构建可以分 ...
- 三维重建5:场景中语义分析/语义SLAM/DCNN-大尺度SLAM
前言: 在实时/非实时大规模三维场景重建中,引入了语义SLAM这个概念,参考三维重建:SLAM的尺度和方法论问题和三维重建:SLAM的粒度和工程化问题 .大规模三维场景重建的尺度增大,因此相对于整个重 ...
- 语义SLAM研究现状总结
博客转载自:https://blog.csdn.net/xiaoxiaowenqiang/article/details/81051010 原文标题:深度学习结合SLAM 语义slam 语义分割 端到 ...
- 语义SLAM的数据关联和语义定位(一)
语义SLAM和多传感器融合是自动驾驶建图和定位部分比较热门的两种技术.语义SLAM中,语义信息的数据关联相较于特征点的数据关联有所不同.我们一般用特征描述子的相似性来匹配和关联不同图像中的特征点.特征 ...
- 语义slam用于高精地图和高精定位的一些想法
最近一直在考虑语义slam在自动驾驶和辅助驾驶中的用法,研究了一下视觉为主的高精度地图+高精定位的模式,特别是mobileye的REM. 秉承先建图再定位的思路,在服务器端(云端)建图,在车端定位. ...
- Objective-C 实用关键字详解1「面试、工作」看我就 🐒 了 ^_^.
在写项目 或 阅读别人的代码(一些优秀的源码)中,总能发现一些常见的关键字,随着编程经验的积累大部分还是知道是什么意思 的. 相信很多开发者跟我当初一样,只是基本的常用关键字定义属性会使用,但在关键字 ...
- iOS模式详解—「runtime面试、工作」看我就 🐒 了 ^_^.
Write in the first[写在最前] 对于从事 iOS 开发人员来说,当提到 ** runtime时,我想都可以说出来 「runtime 运行时」和基本使用的方法.相信很多开发者跟我当初一 ...
- iOS 模式详解—「runtime面试、工作」看我就 🐒 了 ^_^.
引导 Copyright © PBwaterln Unauthorized shall not be *copy reprinted* . 对于从事 iOS 开发人员来说,所有的人都会答出「runti ...
随机推荐
- android studio 3.2 bundle.gradle 与2.2区别
参考:https://blog.csdn.net/MakerCloud/article/details/82898305
- idea maven Running C:\Users\Administrator\AppData\Local\Temp\archetype1tmp
Running C:\Users\Administrator\AppData\Local\Temp\archetype1tmp 在IDEA中通过maven项目管理工具创建javaweb项目的时候一直卡 ...
- 吴裕雄--天生自然C语言开发:强制类型转换
#include <stdio.h> int main() { , count = ; double mean; mean = (double) sum / count; printf(& ...
- Qt 信息提示框 QMessageBox
information QMessageBox::information(NULL, "Title","Content",QMessageBox::Yes | ...
- day27-控制台输出彩色文字
格式:\033[显示方式;前景色;背景色m 说明:显示方式 意义------------------------- 0 终端默认设置 1 ...
- git 学习系列(一)
目录 git 简介 git的升级 建立仓库 克隆仓库 查看主机名 查看仓库初始状态 将文件提交到暂存区 查看修改详情 提交修改 查看修改记录 查看个人配置信息(在 .gitconfig 文件中) 查看 ...
- python-django电商项目-需求分析架构设计数据库设计_20191115
python-django电商项目需求分析 1.用户模块 1)注册页 注册时校验用户名是否已被注册. 完成用户信息的注册. 给用户的注册邮箱发送邮件,用户点击邮件中的激活链接完成用户账户的激活. 2) ...
- 客户端和后台交互日期注意点 sqlite日期字段使用Date类型的情况下
不要直接传递时间类型 一般把时间格式化字符串后传递 不要传递Date().getTime() 毫秒数 非要使用的话需要在后台处理 传递的毫秒数 - TimeZone.getDefault().get ...
- 01-Java 教程
一.我的第一个 java 程序 创建文件 HelloWorld.java(文件名需与类名一致), 代码如下: public class HelloWorld { public static void ...
- Spring @Column的注解详解
就像@Table注解用来标识实体类与数据表的对应关系类似,@Column注解来标识实体类中属性与数据表中字段的对应关系. 该注解的定义如下: @Target({METHOD, FIELD}) @Ret ...