EM算法及其应用(一)
EM算法及其应用(一)
EM算法及其应用(二): K-means 与 高斯混合模型
EM算法是期望最大化 (Expectation Maximization) 算法的简称,用于含有隐变量的情况下,概率模型参数的极大似然估计或极大后验估计。EM算法是一种迭代算法,每次迭代由两步组成:E步,求期望 (expectation),即利用当前估计的参数值来计算对数似然函数的期望值;M步,求极大 (maximization),即求参数\(\theta\) 来极大化E步中的期望值,而求出的参数\(\theta\)将继续用于下一个E步中期望值的估计。EM算法在机器学习中应用广泛,本篇和下篇文章分别探讨EM算法的原理和其两大应用 —— K-means和高斯混合模型。
\(\large{\S} \normalsize\mathrm{1}\) 先验知识
凸函数、凹函数和 Jensen不等式
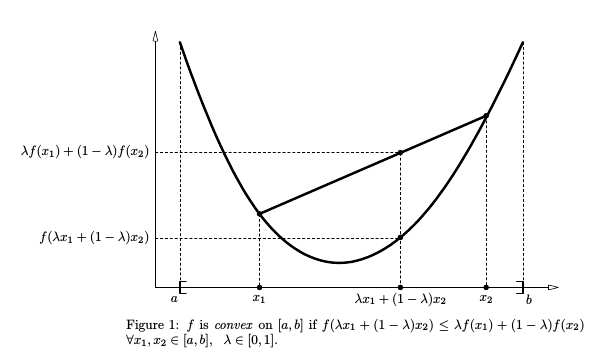
设\(f(x)\)为定义在区间\(I = [a,b]\)上的实值函数,对于任意\(\forall \, x_1, x_2 \in I, \lambda \in [0,1]\),有:
\[
f(\lambda \,x_1 + (1-\lambda)\,x_2) \leq \lambda f(x_1) + (1-\lambda)f(x_2)
\]
则\(f(x)\)为凸函数 (convex function),如下图所示。相应的,若上式中 \(\leqslant\) 变为 \(\geqslant\) ,则\(f(x)\)为凹函数 (concave function)。 凸函数的判定条件是二阶导 \(f^{''}(x) \geqslant 0\),而凹函数为 \(f^{''}(x) \leqslant 0\) 。后文要用到的对数函数\(ln(x)\)的二阶导为\(-\frac{1}{x^2} < 0\),所以是凹函数。
Jensen不等式就是上式的推广,设\(f(x)\)为凸函数,\(\lambda_i \geqslant 0, \;\; \sum_i \lambda_i = 1\),则:
\[
f\left(\sum\limits_{i=1}^n \lambda_i x_i\right) \leq \sum\limits_{i=1}^n \lambda_i f(x_i)
\]
如果是凹函数,则将不等号反向,若用对数函数来表示,就是:
\[
ln\left(\sum\limits_{i=1}^n \lambda_i x_i\right) \geq \sum\limits_{i=1}^n \lambda_i ln(x_i)
\]
若将\(\lambda_i\)视为一个概率分布,则可表示为期望值的形式,在后文中同样会引入概率分布:
\[
f(\mathbb{E}[\mathrm{x}]) \leq \mathbb{E}[f(\mathrm{x})]
\]
KL散度
KL散度(Kullback-Leibler divergence) 又称相对熵 (relative entropy),主要用于衡量两个概率分布p和q的差异,也可理解为两个分布对数差的期望。
\[
\mathbb{KL}(p||q) = \sum_i p(x_i)log \frac{p(x_i)}{q(x_i)}= \mathbb{E}_{\mathrm{x}\sim p}\left[log \frac{p(x)}{q(x)}\right] = \mathbb{E}_{\mathrm{x}\sim p}\left[log\,p(x) - log\,q(x) \right ]
\]
KL散度总满足\(\mathbb{KL}(p||q) \geqslant 0\),而当且仅当\(q=p\)时,\(\mathbb{KL}(p||q) = 0\) 。 一般来说分布\(p(x)\)比较复杂,因而希望用比较简单的\(q(x)\)去近似\(p(x)\),而近似的标准就是KL散度越小越好。
KL散度不具备对称性,即\(\mathbb{KL}(p||q) \neq \mathbb{KL}(q||p)\),因此不能作为一个距离指标。
极大似然估计和极大后验估计
极大似然估计 (Maximum likelihood estimation) 是参数估计的常用方法,基本思想是在给定样本集的情况下,求使得该样本集出现的“可能性”最大的参数\(\theta\)。将参数\(\theta\)视为未知量,则参数\(\theta\)对于样本集X的对数似然函数为:
\[
L(\theta) = ln \,P(X|\theta)
\]
这个函数反映了在观测结果X已知的条件下,\(\theta\)的各种值的“似然程度”。这里是把观测值X看成结果,把参数\(\theta\)看成是导致这个结果的原因。参数\(\theta\)虽然未知但是有着固定值 (当然这是频率学派的观点),并非事件或随机变量,无概率可言,因而改用 “似然(likelihood)" 这个词。
于是通过求导求解使得对数似然函数最大的参数\(\theta\),\(\theta = \mathop{\arg\max}\limits_{\theta}L(\theta)\),即为极大似然法。
极大后验估计 (Maximum a posteriori estimation) 是贝叶斯学派的参数估计方法,相比于频率学派,贝叶斯学派将参数\(\theta\)视为随机变量,并将其先验分布\(P(\theta)\)包含在估计过程中。运用贝叶斯定理,参数\(\theta\)的后验分布为:
\[
P(\theta|X) = \frac{P(X,\theta)}{P(X)} = \frac{P(\theta)P(X|\theta)}{P(X)} \propto P(\theta)P(X|\theta)
\]
上式中\(P(X)\)不依赖于\(\theta\)因而为常数项可以舍去,则最终结果为 \(\theta = \mathop{\arg\max}\limits_{\theta}P(\theta)P(X|\theta)\)
\(\large{\S} \normalsize\mathrm{2}\) EM算法初探
概率模型有时既含有观测变量 (observable variable),又含有隐变量 (hidden variable),隐变量顾名思义就是无法被观测到的变量。如果都是观测变量,则给定数据,可以直接使用极大似然估计。但如果模型含有隐变量时,直接求导得到参数比较困难。而EM算法就是解决此类问题的常用方法。
对于一个含有隐变量\(\mathbf{Z}\)的概率模型,一般将\(\{\mathbf{X}, \mathbf{Z}\}\)称为完全数据,而观测数据\(\mathbf{X}\)为不完全数据。
我们的目标是极大化观测数据\(\mathbf{X}\)关于参数\(\boldsymbol{\theta}\)的对数似然函数。由于存在隐变量,因而也可表示为极大化\(\mathbf{X}\)的边缘分布 (marginal distribution),即:
\[
L(\boldsymbol{\theta}) = ln\,P(\mathbf{X}|\boldsymbol{\theta}) = ln\,\sum\limits_{\mathbf{Z}}P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}) \tag{1.1}
\]
上式中存在“对数的和” —— \(ln\sum(\cdot)\),如果直接求导将会非常困难。因而EM算法采用曲线救国的策略,构建\((1.1)\)式的一个下界,然后通过极大化这个下界来间接达到极大化\((1.1)\)的效果。
要想构建下界,就需要运用上文中的Jensen不等式。记\(\boldsymbol{\theta}^{(t)}\)为第t步迭代参数的估计值,考虑引入一个分布\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})\),由于:
- \(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)}) \geqslant 0\)
- \(\sum_{\mathbf{Z}}P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)}) = 1\)
- \(ln(\cdot)\)为凹函数
因而可以利用Jensen不等式求出\(L(\boldsymbol{\theta})\)的下界:
\[
\begin{align}
L(\boldsymbol{\theta}) = ln\,\sum\limits_{\mathbf{Z}}P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}) &= ln\,\sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}})\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}) }{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})} \tag{1.2}\\
& \geqslant \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}) }{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})} \tag{1.3} \\
& = \underbrace{\sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}) }}_{\mathcal{Q}(\boldsymbol{\theta},\boldsymbol{\theta}^{(t)})} \;\;\underbrace{- \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})}}_{entropy} \tag{1.4}
\end{align}
\]
\((1.3)\)式构成了\(L(\boldsymbol{\theta})\)的下界,而\((1.4)\)式的右边为\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})的熵 \geqslant 0\) ,其独立于我们想要优化的参数\(\boldsymbol{\theta}\),因而是一个常数。所以极大化\(L(\boldsymbol{\theta})\)的下界\((1.3)\)式就等价于极大化\(\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)})\),\(\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)})\) (Q函数) 亦可表示为 \(\,\mathbb{E}_{\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)}}\,lnP(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})\),其完整定义如下:
基于观测数据 \(\mathbf{X}\) 和 当前参数\(\theta^{(t)}\)计算未观测数据 \(\mathbf{Z}\) 的条件概率分布\(P(\mathbf{Z}|\mathbf{X}, \theta^{(t)})\),则Q函数为完全数据的对数似然函数关于\(\mathbf{Z}\)的期望。
此即E步中期望值的来历。
接下来来看M步。在\((1.3)\)式中若令\(\boldsymbol{\theta} = \boldsymbol{\theta}^{(t)}\),则下界\((1.3)\)式变为:
\[
\begin{align*}
& \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta}^{(t)}) }{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})} \\
=\;\; & \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln\frac{P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}})P(\mathbf{X}|\boldsymbol{\theta}^{(t)})}{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})} \\
= \;\; & \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,lnP(\mathbf{X}|\boldsymbol{\theta}^{(t)}) \\
= \;\; & lnP(\mathbf{X}|\boldsymbol{\theta}^{(t)}) \;\;=\;\; L(\boldsymbol{\theta}^{(t)})
\end{align*}
\]
可以看到在第t步,\(L(\boldsymbol{\theta}^{(t)})\)的下界与\(L(\boldsymbol{\theta}^{(t)})\)相等,又由于极大化下界与极大化Q函数等价,因而在M步选择一个新的\(\boldsymbol{\theta}\)来极大化\(\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)})\),就能使\(L(\boldsymbol{\theta}) \geqslant \mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)}) \geqslant \mathcal{Q}(\boldsymbol{\theta}^{(t)}, \boldsymbol{\theta}^{(t)}) = L(\boldsymbol{\theta}^{(t)})\) (这里为了便于理解就将\(\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)})\)与\((1.3)\)式等同了),也就是说\(L(\boldsymbol{\theta})\)是单调递增的,通过EM算法的不断迭代能保证收敛到局部最大值。
EM算法流程:
输入: 观测数据\(\mathbf{X}\),隐变量\(\mathbf{Z}\),联合概率分布\(P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})\)
输出:模型参数\(\boldsymbol{\theta}\)
- 初始化参数\(\boldsymbol{\theta}^{(0)}\)
- E步: 利用当前参数\(\boldsymbol{\theta}^{(t)}\)计算Q函数, \(\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)}) = \sum\limits_{\mathbf{Z}}P(\mathbf{Z|\mathbf{X},\boldsymbol{\theta}^{(t)}}) \,ln{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})}\)
- M步: 极大化Q函数,求出相应的 \(\boldsymbol{\theta} = \mathop{argmax}\limits_{\boldsymbol{\theta}}\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)})\)
- 重复 2. 和3. 步直至收敛。
EM算法也可用于极大后验估计,极大后验估计仅仅是在极大似然估计的基础上加上参数\(\boldsymbol{\theta}\)的先验分布,即 \(p(\boldsymbol{\theta})p(\mathbf{X}|\boldsymbol{\theta})\),则取对数后变为\(ln\,p(\mathbf{X}|\boldsymbol{\theta}) + ln\,p(\boldsymbol{\theta})\),由于后面的\(ln\,p(\boldsymbol{\theta})\)不包含隐变量\(\mathbf{Z}\),所以E步中求Q函数的步骤不变。而在M步中需要求新的参数\(\mathbf{\theta}\),因此需要包含这一项,所以M步变为
\[
\boldsymbol{\theta} = \mathop{argmax}\limits_{\boldsymbol{\theta}} \left[\mathcal{Q}(\boldsymbol{\theta}, \boldsymbol{\theta}^{(t)}) + ln(p(\boldsymbol{\theta})\right]
\]
\(\large{\S} \normalsize\mathrm{3}\) EM算法深入
上一节中遗留了一个问题:为什么式\((1.2)\)中引入的分布是\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{(t)})\)而不是其他分布? 下面以另一个角度来阐述。
假设一个关于隐变量\(\mathbf{Z}\)的任意分布\(q(\mathbf{Z})\),则运用期望值的定义,\((1.1)\)式变为:
\[
\begin{align*}
L(\boldsymbol{\theta}) = lnP(\mathbf{X}|\boldsymbol{\theta}) &= \sum\limits_{\mathbf{Z}}q(\mathbf{Z})\,lnP(\mathbf{X}|\boldsymbol{\theta}) \quad\qquad \text{上下同乘以 $q(\mathbf{Z}) \,P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})$}\\
& = \sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln\frac{P(\mathbf{X}|\boldsymbol{\theta})q(\mathbf{Z}) P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})}{q(\mathbf{Z}) P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})} \\
& = \sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})}{q(\mathbf{Z})} + \sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln \frac{P(\mathbf{X}|\boldsymbol{\theta})q(\mathbf{Z}) }{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})} \\
& = \sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})}{q(\mathbf{Z})} + \sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln \frac{q(\mathbf{Z}) }{P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta})} \\
& = \underbrace{\sum\limits_{\mathbf{Z}}q(\mathbf{Z}) ln\frac{P(\mathbf{X},\mathbf{Z}|\boldsymbol{\theta})}{q(\mathbf{Z})}}_{L(q,\boldsymbol{\theta})} + \mathbb{KL}(q(\mathbf{Z})||P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}))) \tag{2.1}
\end{align*}
\]
\((2.1)\)式的右端为\(q(\mathbf{Z})\)和后验分布\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta})\)的KL散度,由此 \(lnP(\mathbf{X}|\boldsymbol{\theta})\)被分解为\(L(q,\boldsymbol{\theta})\)和\(\mathbb{KL}(q||p)\) 。由于KL散度总大于等于0,所以\(L(q,\boldsymbol{\theta})\)是\(lnP(\mathbf{X}|\boldsymbol{\theta})\)的下界,如图:
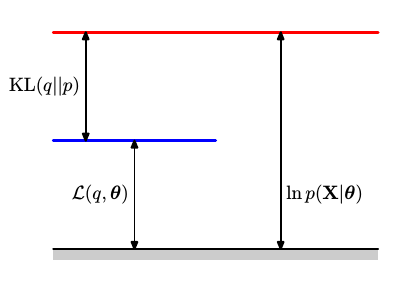
由此可将EM算法视为一个坐标提升(coordinate ascent)的方法,分别在E步和M步不断提升下界\(L(q,\boldsymbol{\theta})\),进而提升\(lnP(\mathbf{X}|\boldsymbol{\theta})\) 。
在E步中,固定参数\(\boldsymbol{\theta}^{old}\),当且仅当\(\mathbb{KL}(q||p) = 0\),即\(L(q,\boldsymbol{\theta}) = lnP(\mathbf{X}|\boldsymbol{\theta})\)时,\(L(q,\boldsymbol{\theta})\)达到最大,而\(\mathbb{KL}(q||p) = 0\)的条件是\(q(\mathbf{Z}) = P(\mathbf{Z}|\mathbf{X}, \boldsymbol{\theta})\),因此这就是式\((1.2)\)中选择分布\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{old})\)的原因,如此一来\(L(q,\boldsymbol{\theta})\) 也就与\((1.3)\)式一致了。
在M步中,固定分布\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{old})\),选择新的\(\boldsymbol{\theta}^{new}\)来极大化\(L(q,\boldsymbol{\theta})\) 。同时由于\(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{old}) \neq P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{new})\),所以\(\mathbb{KL}(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{old}) || P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{new})) > 0\),导致\(lnP(\mathbf{X}|\boldsymbol{\theta})\)提升的幅度会大于\(L(q,\boldsymbol{\theta})\)提升的幅度,如图:
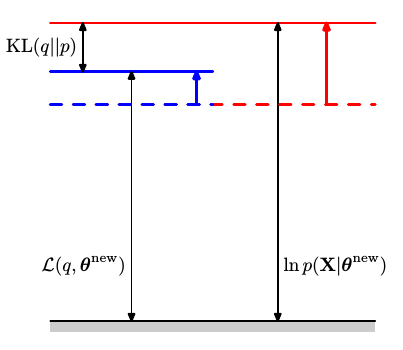
因此在EM算法的迭代过程中,通过交替固定\(\boldsymbol{\theta}\) 和 \(P(\mathbf{Z}|\mathbf{X},\boldsymbol{\theta}^{old})\)来提升下界\(L(q,\boldsymbol{\theta})\) ,进而提升对数似然函数\(L(\boldsymbol{\theta})\) ,从而在隐变量存在的情况下实现了极大似然估计。在下一篇中将探讨EM算法的具体应用。
Reference:
- Christopher M. Bishop. Pattern Recognition and Machine Learning
- 李航. 《统计学习方法》
- CS838. The EM Algorithm
/
EM算法及其应用(一)的更多相关文章
- 学习笔记——EM算法
EM算法是一种迭代算法,用于含有隐变量(hidden variable)的概率模型参数的极大似然估计,或极大后验概率估计.EM算法的每次迭代由两步组成:E步,求期望(expectation):M步,求 ...
- K-Means聚类和EM算法复习总结
摘要: 1.算法概述 2.算法推导 3.算法特性及优缺点 4.注意事项 5.实现和具体例子 6.适用场合 内容: 1.算法概述 k-means算法是一种得到最广泛使用的聚类算法. 它是将各个聚类子集内 ...
- EM算法总结
EM算法总结 - The EM Algorithm EM是我一直想深入学习的算法之一,第一次听说是在NLP课中的HMM那一节,为了解决HMM的参数估计问题,使用了EM算法.在之后的MT中的词对齐中也用 ...
- GMM的EM算法实现
转自:http://blog.csdn.net/abcjennifer/article/details/8198352 在聚类算法K-Means, K-Medoids, GMM, Spectral c ...
- EM算法(4):EM算法证明
目录 EM算法(1):K-means 算法 EM算法(2):GMM训练算法 EM算法(3):EM算法运用 EM算法(4):EM算法证明 EM算法(4):EM算法证明 1. 概述 上一篇博客我们已经讲过 ...
- EM算法(3):EM算法运用
目录 EM算法(1):K-means 算法 EM算法(2):GMM训练算法 EM算法(3):EM算法运用 EM算法(4):EM算法证明 EM算法(3):EM算法运用 1. 内容 EM算法全称为 Exp ...
- EM算法(2):GMM训练算法
目录 EM算法(1):K-means 算法 EM算法(2):GMM训练算法 EM算法(3):EM算法运用 EM算法(4):EM算法证明 EM算法(2):GMM训练算法 1. 简介 GMM模型全称为Ga ...
- EM算法(1):K-means 算法
目录 EM算法(1):K-means 算法 EM算法(2):GMM训练算法 EM算法(3):EM算法运用 EM算法(4):EM算法证明 EM算法(1) : K-means算法 1. 简介 K-mean ...
- [MCSM]随机搜索和EM算法
1. 概述 本节将介绍两类问题的不同解决方案.其一是通过随机的搜索算法对某一函数的取值进行比较,求取最大/最小值的过程:其二则和积分类似,是使得某一函数被最优化,这一部分内容的代表算法是EM算法.(书 ...
- EM算法
EM算法的推导
随机推荐
- Mirror--镜像用户同步
--=========================================--在镜像搭建后,在主库服务器上创建登录,并在数据库上建立对应用户,--数据库中用户被同步到镜像数据库中,但登录是 ...
- Windows 10 升级软件 Windows 10 易升
进入 https://www.microsoft.com/zh-cn/software-download/windows10 点立即更新,弹出如下下载地址. https://download.micr ...
- (转)二十三种设计模式及其python实现
本文源码寄方于github:https://github.com/w392807287/Design_pattern_of_python 参考文献: <大话设计模式>——吴强 <Py ...
- java8工具类使用
1:map的使用 computeIfPresent ,如果键已经存在,将键和值作为参数传到函数式中,计算返回新的值 import java.util.HashMap; import java.util ...
- c primer plus(五版)编程练习-第七章编程练习
1.编写一个程序.该程序读取输入直到遇到#字符,然后报告读取的空格数目.读取的换行符数目以及读取的所有其他字符数目. #include<stdio.h> #include<ctype ...
- 关于使用ubuntu的那些事儿
最近把笔记本的系统由windows改成了ubuntu的最新版系统了,其实改变系统最主要的目的就是希望自己能够快速的学会使用linux系统. 所以这是一篇记录了关于一个ubuntu小白第一次使用ubun ...
- Mybatis分页查询与动态SQL
一.Mybatis的分页查询 由于第一二节较为详细讲述了Mybatis的环境搭建,文件配置,SQL编写和Java代码实现,所以接下来的讲述都将只抽取关键代码和mapper文件中的关键sql,详细的流程 ...
- 认识与设计Serverless(一)
一.什么是Serverless 定义:Serverless是一种无服务器的架构,区别于传统的Baas,SAAS,作为FAAS(函数即服务)而存在,函数由事件驱动触发并按需调用. 按需调用:区别于传统的 ...
- Sql Server CPU 性能排查及优化的相关 Sql
Sql Server CPU 性能排查及优化的相关 Sql 语句,非常好的SQL语句,记录于此: --Begin Cpu 分析优化的相关 Sql --使用DMV来分析SQL Server启动以来累计使 ...
- xgboost 自定义评价函数(metric)与目标函数
比赛得分公式如下: 其中,P为Precision , R为 Recall. GBDT训练基于验证集评价,此时会调用评价函数,XGBoost的best_iteration和best_score均是基于评 ...