图像局部显著性—点特征(SIFT为例)
基于古老的Marr视觉理论,视觉识别和场景重建的基础即第一阶段为局部显著性探测。探测到的主要特征为直觉上可刺激底层视觉的局部显著性——特征点、特征线、特征块。
SalientDetection 已经好就没有复习过了,DNN在识别领域的超常表现在各个公司得到快速应用,在ML上耗了太多时间,求职时被CV的知识点虐死...
点探测总结(SIft、PCA-SIft、Surf、GLOH、Brief、Brisk、ORB、Freak)
特征点寻找的准则之一是算法的通用准则—泛化性能,即在一个场景中中适用,在另一个场景中也具有相似的效果。而在CV领域,专门对于图像处理问题,应对图像的缩放、平移、旋转、明暗问题,进而提出了特征描述算法的相应要求:缩放不变性、平移不变性、旋转不变性和光照不变性。广受好评SIFT特征在综合评价上几乎达到算法极限,其中图像金字塔、寻找主方向、计算图像梯度,分别应对缩放不变、旋转不变、和光照不变,而同时局部特征用于模式识别不需要考虑相对平移的影响。
参考 原文链接(SIFT):http://www.cnblogs.com/cfantaisie/archive/2011/06/14/2080917.html ,文章有修改!为个人意见。
参考以前的一篇:Sift算法总结:用于图像搜索
推荐搜索系列:http://blog.csdn.net/cserchen/article/category/785155
论文下载见文章末尾的参考资料链接
几个主要的特征点算法年代发展表:
1. 1999年的SIFT(ICCV 1999,并改进发表于IJCV 2004,本文描述);
2. 2005年的GLOH 特征(2005年的PAMI期刊);GLOH采用圆形划分取代SIFT的正方形区间划分。
3. 2006年的SURF(2006年的ECCV);SURF算法是对SIFT算法加强版,同时加速的具有鲁棒性的特征。第二、标准的SURF算子比SIFT算子快好几倍,并且在多幅图片下具有更好的鲁棒性。倍。
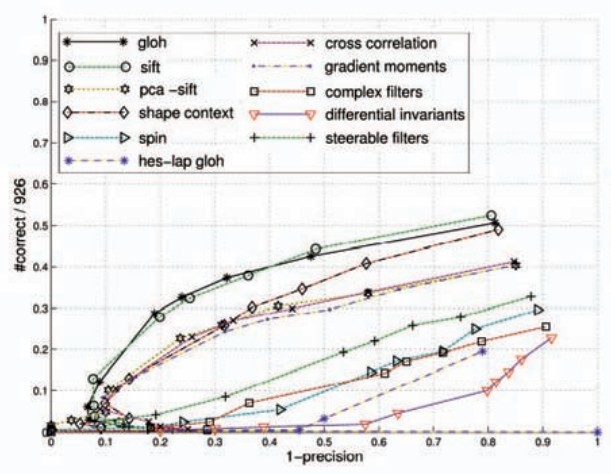
采用NN作为匹配策略的特征描述子性能测评结果:
五、总结
暂无...............................
参考资料:
Sift Wiki百科:https://en.wikipedia.org/wiki/Scale-invariant_feature_transform
Sift 原始论文:Lowe, David G. (1999)."Object recognition from local scale-invariant features" (PDF). Proceedings of the International Conference on Computer Vision.2. pp. 1150–1157.doi:10.1109/ICCV.1999.790410.
Sift 改进和发展:Lowe, David G. (2004)."Distinctive Image Features from Scale-Invariant Keypoints". International Journal of Computer Vision.60 (2): 91–110.doi:10.1023/B:VISI.0000029664.99615.94.
GLOH Wiki百科: https://en.wikipedia.org/wiki/GLOH
GLOH原始论文: Krystian Mikolajczyk and Cordelia Schmid "A performance evaluation of local descriptors", IEEE Transactions on Pattern Analysis and Machine Intelligence, 10, 27, pp 1615--1630, 2005.
Surf 原始论文: Herbert Bay, Andreas Ess, Tinne Tuytelaars, and Luc Van Gool, "Speeded Up Robust Features", ETH Zurich, Katholieke Universiteit Leuven( SURF was first presented byHerbert Bay, et al., at the 2006European Conference on Computer Vision.).
BRISK 原始论文: 《BRISK:Binary Robust Invariant Scalable Keypoints》ICCV2011文章
Surf 原始论文:Herbert Bay, Andreas Ess, Tinne Tuytelaars, Luc Van Gool, "SURF: Speeded Up Robust Features", Computer Vision and Image Understanding (CVIU), Vol. 110, No. 3, pp. 346--359, 2008.