机器学习算法--Perceptron(感知机)算法
感知机:
假设输入空间是\(\chi\subseteq R^n\),输出空间是\(\gamma =\left( +1,-1\right)\)。输入\(\chi\in X\)表示实例的特征向量,对应于输入空间的点;输出\(y\in \gamma\)表示实例的类别。由输入空间到输出空间的如下函数:
\[f\left( x\right) =sign\left( wx+b\right)
\]称为感知机。其中,w和b为感知机模型的参数,sign是符号函数,即:
\[sign\left( x\right) =\begin{cases}+1 &x\geq 0\\-1 &x<0 \end{cases}
\]
感知机学习策略
假设训练数据集是线性可分的,感知机学习的目标就是求得一个能够将训练集正实例点和负实例点完成正确分开的分离超平面。为了找出这样的超平面,即确定感知机模型参数w,b,需定义损失函数并将损失函数极小化。
损失函数使用误分类点到超平面S的总距离,因此输入空间\(R^n\)中任何一点\(x_0\)到超平面S的距离为:
\]
在这里,\(\left\| w\right\|\)是w的\(L_2\)范数。
对于误分类的数据\(\left(x_i,y_i\right)\)来说,
\]
成立。因为当\(wx_i + b >0\)时,\(y_i=-1\),而当\(wx_i + b < 0\)时,\(y_i=+1\),因此,误分类点\(x_i\)到超平面S的距离是:
\]
这样,假设超平面S的误分类点集合为M,那么所以误分类点到超平面S的总距离为:
\]
不考虑\(\dfrac {1}{\left\| w\right\| }\),就得到感知机学习的损失函数:
\]
其中M为误分类点的集合。
感知机算法原始形式
感知机算法是使得损失函数\(L(w,b)\)极小化的最优化问题,可以使用随机梯度下降法来进行最优化。
假设误分类点集合M是固定的,那么损失函数\(L(w,b)\)的梯度由
\]
\]
给出,随机选取一个误分类点\((x_i,y_i)\),对w,b进行更新:
\]
\]
其中\(\eta(0<\eta \leq1)\) 称为学习率(learning rate),这样通过迭代可以使得损失函数\(L(w,b)\)不断减小,直到为0。
感知机算法原始形式的主要训练过程:
def trainPerceptron(dataMat, labelMat, eta):
m, n = dataMat.shape
weight = np.zeros(n)
bias = 0
flag = True
while flag:
for i in range(m):
if np.any(labelMat[i] * (np.dot(weight, dataMat[i]) + bias) <= 0):
weight = weight + eta * labelMat[i] * dataMat[i].T
bias = bias + eta * labelMat[i]
print("weight, bias: ", end="")
print(weight, end=" ")
print(bias)
flag = True
break
else:
flag = False
return weight, bias
完整代码可以前往我的github查看,还有可视化过程。
https://github.com/yangliu0/MachineLearning/tree/master/Perceptron
感知机算法的对偶形式
假设\(w_0,b_0\)均初始化为0,对误分类点通过
\]
\]
逐步修改\(w,b\),设修改n次,则\(w,b\)关于\((w_i,y_i)\)的增量分为是\(\alpha_i y_ix_i\)和\(\alpha_i y_i\),这里的\(\alpha_i=n_i \eta\),其中\(n_i\)表示第i个点误分类的次数,这样最后学习到的\(w,b\)可以分别表示为
\]
\]
实例点更新的次数越多,意味着它距离分离超平面越近,也就越难正确分类。
训练过程:输出\(\alpha,b\),其中\(\alpha = (\alpha_1, \alpha_2,...,\alpha_N)^T\)
(1)\(\alpha\leftarrow0, b\leftarrow0\)
(2)在训练集中选取数据\((x_i, y_i)\)
(3)如果\(y_{i}\left( \sum ^{n}_{j=1}\alpha _{j}y_{j}x_{j}\cdot x_{i}+b\right)\leq0\),则
\]
\]
(4)转到(2),直到没有错误。
最后通过\(w=\sum ^{N}_{i=1}\alpha _{i}y_{i}x_{i}\)计算出\(w\),使用上述过程求出的\(b\),即计算出模型参数。
以下就是上述感知机对偶形式的python训练代码:
def trainModel(dataMat, labelMat, alpha, b, eta):
flag = True
while flag:
for i in range(m):
if (labelMat[i, 0] * (np.sum((alpha * labelMat * np.dot(dataMat, dataMat[i].T).reshape((m, 1)))) + b)) <= 0:
alpha[i] = alpha[i] + eta
b = b + eta * labelMat[i]
flag = True
break
else:
flag = False
w = np.dot(dataMat.T, alpha * labelMat)
return w, b
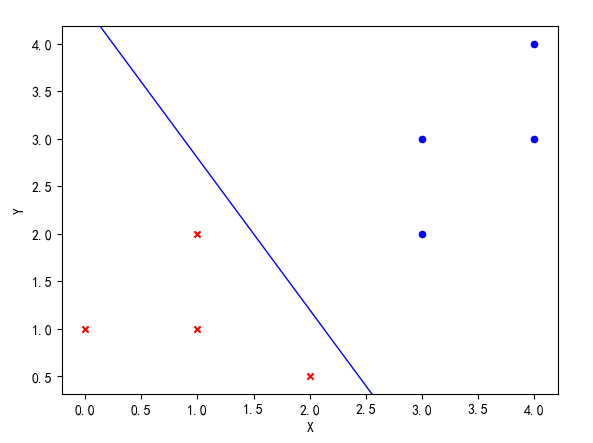
以下就是结果可视化图,可以看出,训练的感知机算法对线性可分的点进行了很好的划分。
感知机算法的原始形式和对偶形式分别对应了支持向量机(SVM)的两种相应形式,是它们的基础。
上述两种形式的感知机算法完整实现可以在我的github查看,使用python实现。
https://github.com/yangliu0/MachineLearning/tree/master/Perceptron
参考文献
[1]统计学习方法.李航
机器学习算法--Perceptron(感知机)算法的更多相关文章
- 机器学习---用python实现感知机算法和口袋算法(Machine Learning PLA Pocket Algorithm Application)
之前在<机器学习---感知机(Machine Learning Perceptron)>一文中介绍了感知机算法的理论知识,现在让我们来实践一下. 有两个数据文件:data1和data2,分 ...
- 机器学习笔记(一)· 感知机算法 · 原理篇
这篇学习笔记强调几何直觉,同时也注重感知机算法内部的动机.限于篇幅,这里仅仅讨论了感知机的一般情形.损失函数的引入.工作原理.关于感知机的对偶形式和核感知机,会专门写另外一篇文章.关于感知机的实现代码 ...
- 【分类算法】感知机(Perceptron)
0 - 算法描述 感知机算法是一类二分类算法,其问题描述为,给定一个训练数据集 $$T=\{(x_1,y_1),(x_2,y_2),\cdots,(x_N,y_N)\},$$ 其中$x_i\in \m ...
- Python 实现简单的感知机算法
感知机 随机生成一些点和一条原始直线,然后用感知机算法来生成一条直线进行分类,比较差别 导入包并设定画图尺寸 import numpy as np import matplotlib.pyplot a ...
- 感知机算法(PLA)代码实现
目录 1. 引言 2. 载入库和数据处理 3. 感知机的原始形式 4. 感知机的对偶形式 5. 多分类情况-one vs. rest 6. 多分类情况-one vs. one 7. sklearn实现 ...
- 机器学习系列------1. GBDT算法的原理
GBDT算法是一种监督学习算法.监督学习算法需要解决如下两个问题: 1.损失函数尽可能的小,这样使得目标函数能够尽可能的符合样本 2.正则化函数对训练结果进行惩罚,避免过拟合,这样在预测的时候才能够准 ...
- 机器学习六--K-means聚类算法
机器学习六--K-means聚类算法 想想常见的分类算法有决策树.Logistic回归.SVM.贝叶斯等.分类作为一种监督学习方法,要求必须事先明确知道各个类别的信息,并且断言所有待分类项都有一个类别 ...
- 机器学习10大经典算法.doc
详见 F:\工程硕士\d电子书\26 数据挖掘 小结: 1. C4.5 C4.5算法是机器学习算法中的一种分类决策树算法,其核心算法是ID3算法. C4.5算法继承了ID3算法的优点,并在以下几方面 ...
- 机器学习之K近邻算法(KNN)
机器学习之K近邻算法(KNN) 标签: python 算法 KNN 机械学习 苛求真理的欲望让我想要了解算法的本质,于是我开始了机械学习的算法之旅 from numpy import * import ...
随机推荐
- ROS命令
rospack find [package_name]功能:获取软件包的路径 例:运行 rospack find roscpp ,会返回 /opt/ros/indigo/share/roscppros ...
- ModelForm
这是一个神奇的组件,通过名字我们可以看出来,这个组件的功能就是把model和form组合起来,对,你没猜错,相信自己的英语水平. 先来一个简单的例子来看一下这个东西怎么用: 比如我们的数据库中有这样一 ...
- Oracle学习笔记之存储过程
...
- APP崩溃提示:This application is modifying the autolayout engine from a background thread after the engine was accessed from the main thread. This can lead to engine corruption and weird crashes.
崩溃输出日志 2017-08-29 14:53:47.332368+0800 HuiDaiKe[2373:1135604] This application is modifying the auto ...
- 在unity3d游戏中添加中文语音控制
最近打算尝试一下OLAMI在游戏中应用的可能性,这里做一下记录. unity官方教程中的几个项目很精简,但看起来很不错,里面有全套的资源.最后我选择了tanks-tutorial来做这个实验. 下载和 ...
- Servlet 笔记-读取表单数据
Servlet 处理表单数据,这些数据会根据不同的情况使用不同的方法自动解析: getParameter():您可以调用 request.getParameter() 方法来获取表单参数的值. get ...
- Python3爬虫登录模拟
使用Python爬虫登录系统之后,能够实现的操作就多了很多,下面大致介绍下如何使用Python模拟登录. 我们都知道,在前端的加密验证,只要把将加密环境还原出来,便能够很轻易地登录. 首先分析登录的步 ...
- JPA 映射单向多对一的关联关系
1.首先在多的一端加入一的一端的实体类 //映射单向n-1的关联关 //使用@ManyToOne 来映射多对一的关系 //使用@JoinColumn 来映射外键/可以使用@ManyToOne的fetc ...
- iPhone X 适配解决方案
在head里添加<meta name='viewport' content='initial-scale=1, viewport-fit=cover'> 这将导致一个页面允分利用iPhon ...
- 纯js实现DIV拖拽
写代码的时候遇到需要对绝对布局的div进行拖拽的功能,起初为了省事直接在网上扒拉了一番,看到大神张鑫旭的一篇文章<JavaScript实现最简单的拖拽效果>,便直接拿来使用(膜拜大神).但 ...