TPYBoard v102 驱动28BYJ-48步进电机
TPYBoard v102 驱动28BYJ-48步进电机
实验目的
了解步进电机的工作原理
学习步进电机的驱动方法
实验器材
TPYBoard v102 1块
微型步进电机(28BYJ-48) 1个
步进电机驱动板(ULN2003APG) 1块
micro USB数据线 1条
杜邦线 若干
步进电机的介绍
本次实验采用的是28BYJ-48 四相八拍电机,电压DC5V~12V。
24BYJ48名称的含义:
24:电机外径24mm
B:步进电机中步字的拼音首字母
Y:永磁中永字的拼音首字母
J:减速的减字拼音首字母
48:四相8步
实物图

工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度, 称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
28BYJ-48 步进电机参数表

上表中启动频率≥550 P.P.S(每秒脉冲数),意思是要想正常启动,需要单片机每秒至少给出550个步进脉冲。那么每一节拍需要持续的时间就是1S/550≈1.8ms,所以控制节拍刷新的速率应大约1.8ms。
驱动原理
当连续不断的给电机发送控制脉冲时,电机就会不断的转动。每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,对应转子就会转过一定的角度(步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式:
四拍(单相绕组通电):A-B-C-D-A…
双四拍(双相绕组通电):AB-BC-CD-DA-AB-...
八拍: A-AB-B-BC-C-CD-D-DA-A…
模拟效果图

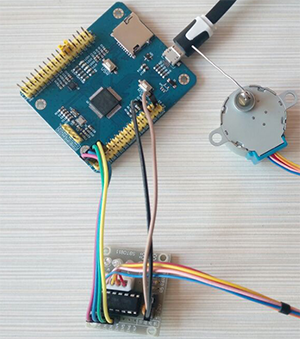
硬件连接
将步进电机白色接头插到驱动板对应的座子上即可。
TPYBoard v102驱动板与驱动板的接线图,如下:
|
TPYBoard v102 |
ULN2003APG驱动板 |
|
X1 |
IN1 |
|
X2 |
IN2 |
|
X3 |
IN3 |
|
X4 |
IN4 |
|
VIN |
5V正极 |
|
GND |
负极 |
程序源码如下:
|
# main.py -- put your code here! import pyb from pyb import Pin Pin_All=[Pin(p,Pin.OUT_PP) for p in ['X1','X2','X3','X4']] #转速(ms) 数值越大转速越慢 最小值1.8ms speed=2 STEPER_ROUND=512 #转动一圈(360度)的周期 ANGLE_PER_ROUND=STEPER_ROUND/360 #转动1度的周期 print('ANGLE_PER_ROUND:',ANGLE_PER_ROUND) def SteperWriteData(data): count=0 for i in data: Pin_All[count].value(i) count+=1 def SteperFrontTurn(): global speed SteperWriteData([1,1,0,0]) pyb.delay(speed) SteperWriteData([0,1,1,0]) pyb.delay(speed) SteperWriteData([0,0,1,1]) pyb.delay(speed) SteperWriteData([1,0,0,1]) pyb.delay(speed) def SteperBackTurn(): global speed SteperWriteData([1,1,0,0]) pyb.delay(speed) SteperWriteData([1,0,0,1]) pyb.delay(speed) SteperWriteData([0,0,1,1]) pyb.delay(speed) SteperWriteData([0,1,1,0]) pyb.delay(speed) def SteperStop(): SteperWriteData([0,0,0,0]) def SteperRun(angle): global ANGLE_PER_ROUND val=ANGLE_PER_ROUND*abs(angle) if(angle>0): for i in range(0,val): SteperFrontTurn() else: for i in range(0,val): SteperBackTurn() angle = 0 SteperStop() if __name__=='__main__': SteperRun(180) SteperRun(-180) |
TPYBoard v102 驱动28BYJ-48步进电机的更多相关文章
- [Micropython]TPYBoard v102 DIY照相机
摄像头(CAMERA或WEBCAM)又称为电脑相机.电脑眼.电子眼等,是一种视频输入设备,被广泛的运用于视频会议,安防系统 .图像采集系统. 环境监控 .工业现场过程控制 等方面.本实验用TPYBoa ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
- [MicroPython]TPYBoard v102炫彩跑马灯WS2812B
一.实验目的 了解ws2812b的工作原理 学习ws2812b的驱动方法 二.实验器材 TPYBoard v102 1块 ws2812b RGB-Ring-8 1个 micro USB数据线 1条 杜 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- MicroPython之TPYBoard v102开发板控制OLED显示中文
转载请以链接形式注明文章来源,公众号:MicroPython玩家汇 0x00前言 之前看到一篇文章是关于TPYBoardv102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近 ...
- MicroPython开发板:TPYBoard v102 播放音乐实例
0x00前言 前段时间看到TPYBoard的技术交流群(群号:157816561,)里有人问关于TPYBoard播放音乐的问题.最近抽空看了一下文档介绍,着手做了个实验.更多MicroPython的教 ...
- TPYBoard v102 DIY照相机(视频和制作流程)
前段时间的帖子,利用TPYBoard v102做的DIY照相机,周末实物终于做出来了,加了两个按键模块和一个5110,做的有点糙啊----望大家勿怪,哈哈哈.拍出来图片还算清晰,串口摄像头模块用的30 ...
- Micropython TPYBoard v102 温湿度短信通知器(基于SIM900A模块)
前言 前段时间看了追龙2,感受就是如果你是冲着追龙1来看追龙2的话,劝你还是不要看了,因为追龙2跟追龙1压根没什么联系,给我的感觉就像是看拆弹专家似的,估计追龙2这个名字就是随便蹭蹭追龙1的热度来的. ...
- MicroPython TPYBoard v102 无线红外遥控舵机(基于红外解/编码模块)
转载请注明文章来源,更多教程可自助参考docs.tpyboard.com,QQ技术交流群:157816561,公众号:MicroPython玩家汇 红外解码/编码模块介绍 模块上搭载了红外接收头.红外 ...
随机推荐
- ASP.NET Core远程调试
关于ASP.NET Core远程调试的具体做法可参考微软文档——Remote Debug ASP.NET Core on a Remote IIS Computer in Visual Studio ...
- 迭代加深搜索POJ 3134 Power Calculus
题意:输入正整数n(1<=n<=1000),问最少需要几次乘除法可以从x得到x的n次方,计算过程中x的指数要求是正的. 题解:这道题,他的结果是由1经过n次加减得到的,所以最先想到的就是暴 ...
- Java爬虫——人人网模拟登录
人人网登录地址:http://www.renren.com/ 此处登录没有考虑验证码验证码. 首先对登录方法进行分析 有两种方法. 一)在Elements中分析源码 发现登录点击后的事件是http:/ ...
- 开发H5基本知识摘要
一:开发平台 我在公司开发app主要是在apicloud平台上https://www.apicloud.com/,需要开发的同学可以点击进入这个平台了解: 二:开发工具 既然是在apicloud平台上 ...
- wps 操作
wps选择视图-->文档结构图
- Unity 3D游戏开发引擎:最火的插件推荐
摘要:为了帮助使用Unity引擎的开发人员制作更完美的游戏.我们精心挑选了十款相关开发插件和工具.它们是:2D Toolkit.NGUI.Playmaker.EasyTouch & EasyJ ...
- 赵雅智_Swift(1)_swift简单介绍及类型
Swift 是 iOS 和 OS X 应用开发的一门新语言. 假设你有 C 或者 Objective-C 开发经验, Swift 的非常多内容都是你熟悉的. Swift 的类型是在 C 和 Objec ...
- It appears that the Web Project,“”,has no Web Root directory setup
1 错误描写叙述 2 错误原因 因为项目是用eclipse新建的,web的根文件夹文件夹是WebContent.而MyEclipse新建的项目的Web根文件夹是WebRoot.直接将eclipse项目 ...
- javaweb:推断当前请求是否为移动设备訪问
这段时间都是在做pc端的业务.结果经理找到我说,可能要做移动端的应用,后台逻辑还是用我写的逻辑.可是须要修改一些,看看怎么处理. 因为移动端和pc端还是略微有些差别的,我认为最好是在一个地儿统一推断, ...
- AspNet Core Api Restful +Swagger 实现微服务之旅(四)
这几天没更新,项目框架也是在发展阶段,这几天学习配置了一遍Apollo和RabbitMQ 等到放到框架上之后我整理一下到时候把心得写出来相互学习. 接着上一篇的内容 (2) 程序错误时 返回数据格 ...