激光相机数据融合(4)--KITTI数据集中matlab接口说明及扩展
KITTI数据集接口已经提供了matlab接口,本篇将说明详细说明其应用并与PCL进行对接。PCL为C++点云处理语言库,详情可见:http://pointclouds.org/
程序可以从官网下载,也可以从我的github上下载https://github.com/ZouCheng321/fusion_kitti,为运行本代码,必须先编译make.m文件。
关于激光相机的demo为 run_demoVelodyne.m
本例以读取 2011_09_26_drive_0005_sync场景,读取第一帧,为例
首先设置读取路径和基本信息
if nargin<
base_dir = './data/2011_09_26_drive_0005_sync';%场景路径
end
if nargin<
calib_dir = './data/2011_09_26';%标定文件路径
end
cam = ; % 第二个相机
frame = ; % 帧数
读取标定文件:
% load calibration
calib = loadCalibrationCamToCam(fullfile(calib_dir,'calib_cam_to_cam.txt'));
Tr_velo_to_cam = loadCalibrationRigid(fullfile(calib_dir,'calib_velo_to_cam.txt')); % compute projection matrix velodyne->image plane
R_cam_to_rect = eye();
R_cam_to_rect(:,:) = calib.R_rect{};
P_velo_to_img = calib.P_rect{cam+}*R_cam_to_rect*Tr_velo_to_cam; %内外参数
其中P_velo_to_img 为上文所释的投影矩阵:KRTcl。 Tr_velo_to_cam 为RTcl矩阵,R_cam_to_rect为相机畸变矫正矩阵,calib.P_rect{cam+1}为相机内参。
接下来读取图像和激光数据,并删除在相机平面后面的激光点:
% load and display image
img = imread(sprintf('%s/image_%02d/data/%010d.png',base_dir,cam,frame));
fig = figure('Position',[ size(img,) size(img,)]); axes('Position',[ ]);
imshow(img); hold on; % load velodyne points
fid = fopen(sprintf('%s/velodyne_points/data/%010d.bin',base_dir,frame),'rb');
velo = fread(fid,[ inf],'single')';
velo = velo(::end,:); % remove every 5th point for display speed
fclose(fid); % remove all points behind image plane (approximation
idx = velo(:,)<;
velo(idx,:) = [];
最后就是投影过程:
velo_img = project(velo(:,:),P_velo_to_img);
在图像上显示,距离用颜色表示:
cols = jet;
for i=:size(velo_img,)
col_idx = round(*/velo(i,));
plot(velo_img(i,),velo_img(i,),'o','LineWidth',,'MarkerSize',,'Color',cols(col_idx,:));
end

下面我将为大家说明获取保存为彩色点云,为后续算法做准备。
首先去除投影到图像外界的点:
X_plane=round(velo_img(:,));
Y_plane=round(velo_img(:,));
cloud=velo(:,:);
indice=find(X_plane>size(img,));
X_plane(indice)=[];
Y_plane(indice)=[];
cloud(indice,:)=[];
indice=find(X_plane<);
X_plane(indice)=[];
Y_plane(indice)=[];
cloud(indice,:)=[];
indice=find(Y_plane>size(img,));
X_plane(indice)=[];
Y_plane(indice)=[];
cloud(indice,:)=[];
indice=find(Y_plane<);
X_plane(indice)=[];
Y_plane(indice)=[];
cloud(indice,:)=[];
然后获取图像每个点的RGB值:
R=img(:,:,);
G=img(:,:,);
B=img(:,:,); induv=sub2ind(size(R),X_plane,Y_plane); cloud(:,)=double(R(induv))/+;
cloud(:,)=double(G(induv))/+;
cloud(:,)=double(B(induv))/+;
最后将点云保存为pcd格式,借助了外部文件savepcd.m:
savepcd('color_cloud.pcd',cloud');
接下开用pcl库显示点云,请确保电脑已经安装pcl:
cd view
mkdir build
cd build
cmake ..
make
./cloud_viewer ../../color_cloud.pcd
可以看见融合后的彩色点云:
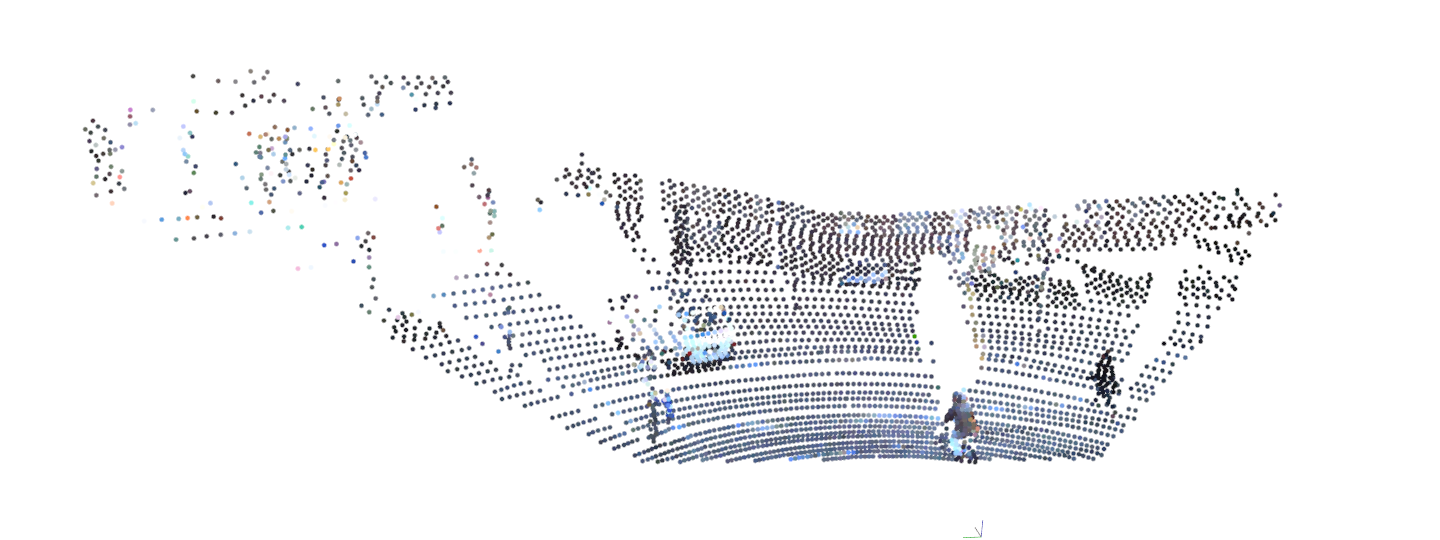
至于如何利用所以帧建立地图将在后面的博客中介绍。
激光相机数据融合(4)--KITTI数据集中matlab接口说明及扩展的更多相关文章
- DataPipeline丨新型企业数据融合平台的探索与实践
文 |刘瀚林 DataPipeline后端研发负责人 交流微信 | datapipeline2018 一.关于数据融合和企业数据融合平台 数据融合是把不同来源.格式.特点性质的数据在逻辑上或物理上有机 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- 数据融合(data fusion)原理与方法
数据融合(data fusion)原理与方法 数据融合(data fusion)最早被应用于军事领域. 现在数据融合的主要应用领域有:多源影像复合.机器人和智能仪器系统.战场和无人驾驶飞机.图 ...
- 激光相机数据融合(3)--KITTI数据集
KITTI数据集提供了双目图像,激光数据,和imu/gps位置信息,其中还包括了大量的算法.下载地址为:http://www.cvlibs.net/datasets/kitti/raw_data.ph ...
- 数据质量、特征分析及一些MATLAB函数
MATLAB数据分析工具箱 MATLAB工具箱主要含有的类别有: 数学类.统计与优化类.信号处理与通信类.控制系统设计与分析类.图像处理类.测试与测量类.计算金融类.计算生物类.并行计算类.数据库访问 ...
- reshape2 数据操作 数据融合 (melt)
前面一篇讲了cast,想必已经见识到了reshape2的强大,当然在使用cast时配合上melt这种强大的揉数据能力才能表现的淋漓尽致. 下面我们来看下,melt这个函数以及它的特点. melt(da ...
- Atitit 数据融合merge功能v3新特性.docx
Atitit 数据融合merge功能v3新特性.docx 1.1. 版本历史1 1.2. 生成sql结果1 1.3. 使用范例1 1.4. 核心代码1 1.1. 版本历史 V2增加了replace部分 ...
- eas之数据融合
1.如何进行自由融合自由融合无须指定区域,KDTable将根据指定的融合模式,融合相邻且值相等的单元.// 自由行融合table.getMergeManager().setMergeMode(KDTM ...
- CarbonData:大数据融合数仓新一代引擎
[摘要] CarbonData将存储和计算逻辑分离,通过索引技术让存储和计算物理上更接近,提升CPU和IO效率,实现超高性能的大数据分析.以CarbonData为融合数仓的大数据解决方案,为金融转型打 ...
随机推荐
- 【MVC】MvcPager分页及边界传递数据示例
using System; using System.Collections.Generic; using System.Linq; using System.Web; using System.We ...
- c# 【MVC】WebApi通过HttpClient来调用Web Api接口
/// <summary> /// HttpClient实现Post请求(异步) /// </summary> static async void dooPost() { st ...
- 平板不能设置代理的情况下利用随身wifi进行http代理访问
需求来源:平板或手机是个封闭系统无法给wifi设置代理,需要利用filllder进行抓包,内容篡改等实验 拥有硬件资源:PC机器 + 小米随身wifi 方案1: NtBind Dns + Nginx ...
- CSS盒子模型之详解
前言: 盒子模型是css中最核心的基础知识,理解了这个重要的概念才能更好的排版,进行页面布局.一.css盒子模型概念 CSS盒子模型 又称框模型 (Box Model) ,包含了元 ...
- Session详解及集群共享
Session的介绍 维基百科:会话(session)是一种持久网络协议,在用户(或用户代理)端和服务器端之间创建关联,从而起到交换数据包的作用机制,session在网络协议(例如telnet或FTP ...
- linux组网笔记
一直以为自己linux还说的过去,事实上已经跟不上日新月异的应用需要了. 现成文档都没法看,错太多.然而毕竟是多年积累,整理一个准确的文档还是能做到的. 本机ip设置: # static interf ...
- Golang开发者常见的坑
Golang开发者常见的坑 目录 [−] 初级 开大括号不能放在单独的一行 未使用的变量 未使用的Imports 简式的变量声明仅可以在函数内部使用 使用简式声明重复声明变量 偶然的变量隐藏Accid ...
- [POJ 1410] Intersection(线段与矩形交)
题目链接:http://poj.org/problem?id=1410 Intersection Time Limit: 1000MS Memory Limit: 10000K Total Sub ...
- canvas画布标签
最近良师益友整理一些canvas的资料,加强学习了解! 当你创建一个<canvas>元素后,就拥有了它的绘图上下文. 一.简单图形 1.getContext()方法 为了在canvas上绘 ...
- 使用Git与Github创建自己的远程仓库
原因 早就想创建一个自己的远程仓库,方便发布到Nuget上,自己用也好,项目组用也好,都方便. 今天抽了个时间建了个仓库,随便记下溜方便后来的人. 流程 1,创建自己的GitHub仓库 首先需要到 G ...