liunx驱动之字符设备的注册
上一篇文章学习了如何编写linux驱动,通过能否正常加载模块进行验证是否成功,有做过liunx应用开发的小伙伴都知道驱动会在‘/dev’目录下以文件的形式展现出来,所以只是能加载驱动模块不能算是完成驱动的开发,而linux驱动分为三类,现在开始学习字符设备的注册。
一、主备材料
因为我主要是学习arm开发板的驱动编写,所以以后的测试中我都是以开发板测试为主,如果有想了解ubuntu下的测试或驱动编写的小伙伴,请阅读上一篇文章linux设备驱动编写入门
开发环境:VMware
操作系统:ubuntu
开发版:湃兔i2S-6UB
库文件:linux开发板或ubuntu的内核源码
二、注册字符设备
经过我的了解注册字符设备主要有两种方法,分为指定设备号注册和自动分配设备号注册两种方式。
1.通过指定字符设备号进行注册
通过指定设备号注册通常称为静态注册,主要注册函数有两个
a.linux2.4版本之前的注册方式是通过register_chrdev函数
int register_chrdev(unsigned int major, const char *name,const struct file_operations *fops);
major:主设备号
name:字符设备名称
fops:file_operations结构体
使用这个函数注册是会有很大的缺点,因为linux的设备号分为主设备号和次设备号,而这个函数注册时会将主设备号的次设备号全部进行注册,所以2.4版本后引入了新的静态函数进行注册。
b.register_chrdev_region()函数
int register_chrdev_region(dev_t from, unsigned count, const char *name);
from:注册的指定起始设备编号,比如:MKDEV(100, 0),表示起始主设备号100, 起始次设备号为0
count:需要连续注册的次设备编号个数
*name:字符设备名称
细心的小伙伴会发现注册的函数中缺少了file_operations结构体,没错2.4版本后确实有所改变,具体的注册方式见后续步骤。
c.设备号获取
因为静态注册是通过指定设备号进行注册的,那么设备号应该设备为多少才不会和设备已有的冲突了,为此我们可以通过一个命令查看设备已经在使用的主设备号,我们只需要选择一个没有使用的即可,命令如下
cat /proc/devices
2.通过自动分配设备号进行注册
采用动态的方式获取主设备号,就不需要通过指令查看后在指定具体的设备号,为编写程序提供了便捷,可以通过alloc_chrdev_region函数获取设备号
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count,const char *name);
*dev: 存放起始设备编号的指针,当注册成功, *dev就会等于分配到的起始设备编号,可以通过MAJOR()和MINNOR()函数来提取主次设备号
baseminor:次设备号基地址,也就是起始次设备号
count:需要连续注册的次设备编号个数
*name:字符设备名称
3.注销字符设备
因为linux的函数基本是成对存在饿,所以有注册函数便有注销函数,以下是注销函数
int unregister_chrdev(unsigned int major,const char *name)
int register_chrdev_region(dev_t from, unsigned count, const char *name)
从函数名既可以看出,unregister_chrdev注销函数对应注册函数是register_chrdev,而register_chrdev_region和alloc_chrdev_region注册函数都是通过register_chrdev_region函数来注销的。
4.cdev使用
通过以上介绍的三个字符设备的注册函数可知、register_chrdev_region和alloc_chrdev_region函数注册时缺少file_operations这个结构体的参数,而使用这两个函数进行注册时需要使用cdev_init和cdev_add函数添加file_operations结构体到系统中,卸载时通过cdev_del将file_operations从系统中卸载。
通过include/linux/cdev.h文件可知cdev结构体的成员,如下所示:
struct cdev {
struct kobject kobj; // 内嵌的kobject对象
struct module *owner; //所属模块
const struct file_operations *ops; //操作方法结构体
struct list_head list; //与 cdev 对应的字符设备文件的 inode->i_devices 的链表头
dev_t dev; //起始设备编号,可以通过MAJOR(),MINOR()来提取主次设备号
unsigned int count; //连续注册次设备号的个数
};
初始化cdev结构体,并将file_operations结构体放入cdev-> ops 中
void cdev_init(struct cdev *cdev, const struct file_operations *fops)
添加cdev结构体到系统中
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
最后在卸载驱动之前别忘记将cdev结构体从系统中移除
void cdev_del(struct cdev *p)
到此注册字符设备的函数已经介绍完了
三、file_operations结构体
在介绍字符设备时会有一个file_operations结构体的参数,现在开始了接一下file_operations结构体,在include/linux/fs.h文件中我们可以看到结构体的定义,原型如下所示
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iterate) (struct file *, struct dir_context *);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*mremap)(struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
#ifndef CONFIG_MMU
unsigned (*mmap_capabilities)(struct file *);
#endif
};
通过file_operations结构体可知,字符设备的实现方法都有哪些,实现方式如下所示
static int test_open(struct inode *inode, struct file *filp)
{
return 0;
}
static int test_release(struct inode *inode, struct file *filp)
{
return 0;
}
static ssize_t test_read(struct file *filp, __user char *buf, size_t count, loff_t *ppos)
{
return 0;
}
static ssize_t test_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos)
{
return 0;
}
/*
*字符设备操作集合
*/
static const struct file_operations test_fops = {
.owner = THIS_MODULE,
.open = test_open,
.release = test_release,
.read = test_read,
.write = test_write,
};
现在字符设备注册已经完成了,结果上一节设备驱动的源码进行实现。
四、字符设备注册源码
1.使用register_chrdev方式注册的源码如下所示
hell_demo1.c文件
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#define HELLO1_NAME "hello1"
#define HELLO1_MAJOR 300
static char readbuf[100];
static char writebuf[100];
static char kerneldata[] = {"hello This is the kernel data"};
static int hello1_open(struct inode *inode, struct file *filp)
{
return 0;
}
static int hello1_release(struct inode *inode, struct file *filp)
{
return 0;
}
static ssize_t hello1_read(struct file *filp, __user char *buf, size_t count, loff_t *ppos)
{
int ret = 0;
memcpy(readbuf, kerneldata, sizeof(kerneldata));
ret = copy_to_user(buf, readbuf, count);
if(ret == 0) {
} else {
}
return 0;
}
static ssize_t hello1_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos)
{
int ret = 0;
ret = copy_from_user(writebuf, buf, count);
if(ret == 0) {
printk("kernel recevdata:%s\r\n", writebuf);
} else {
}
return 0;
}
/*
*字符设备操作集合
*/
static const struct file_operations hello1_fops = {
.owner = THIS_MODULE,
.open = hello1_open,
.release = hello1_release,
.read = hello1_read,
.write = hello1_write,
};
static int __init hello1_init(void)
{
int ret = 0;
printk("hello1_init\r\n");
/*注册字符设备*/
register_chrdev(HELLO1_MAJOR, HELLO1_NAME, &hello1_fops);
if(ret < 0) {
printk("hell01 init failed!\r\n");
} else {
printk("hello1 init ok");
}
return 0;
}
static void __exit hello1_exit(void)
{
printk("hello1_exit\r\n");
/*注销字符设备*/
unregister_chrdev(HELLO1_MAJOR, HELLO1_NAME);
}
/*
*
*模块入口与出口函数
*
*/
module_init(hello1_init);
module_exit(hello1_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jiaozhu");
2.使用register_chrdev_region和alloc_chrdev_region方式注册的源码如下所示
hell_demo2.c文件
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#define HELLO2_NAME "hello2"
#define HELLO2_COUNT 1
/*设备结构体*/
struct hello2_dev{
struct cdev cdev; /*字符设备*/
dev_t devid; /*设备号*/
int major; /*主设备号*/
int minor; /*次设备号*/
};
struct hello2_dev hello2;
static char readbuf[100];
static char writebuf[100];
static char kerneldata[] = {"hello This is the kernel data"};
static int hello2_open(struct inode *inode, struct file *filp)
{
return 0;
}
static int hello2_release(struct inode *inode, struct file *filp)
{
return 0;
}
static ssize_t hello2_read(struct file *filp, __user char *buf, size_t count, loff_t *ppos)
{
int ret = 0;
memcpy(readbuf, kerneldata, sizeof(kerneldata));
ret = copy_to_user(buf, readbuf, count);
if(ret == 0) {
} else {
}
return 0;
}
static ssize_t hello2_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos)
{
int ret = 0;
ret = copy_from_user(writebuf, buf, count);
if(ret == 0) {
printk("kernel recevdata:%s\r\n", writebuf);
} else {
}
return 0;
}
/*
*字符设备操作集合
*/
static const struct file_operations hello2_fops = {
.owner = THIS_MODULE,
.open = hello2_open,
.release = hello2_release,
.read = hello2_read,
.write = hello2_write,
};
static int __init hello2_init(void)
{
int ret = 0;
printk("hello2_init\r\n");
/*设置设备号*/
if(hello2.major){
hello2.devid = MKDEV(hello2.major, 0);
ret = register_chrdev_region(hello2.devid, HELLO2_COUNT, HELLO2_NAME);
} else {
ret = alloc_chrdev_region(&hello2.devid, 0, HELLO2_COUNT, HELLO2_NAME);
hello2.major = MAJOR(hello2.devid);
hello2.minor = MINOR(hello2.devid);
}
if(ret < 0) {
printk("hello2 chrdev_region err!\r\n");
return -1;
}
printk("hello2 major = %d, minor = %d\r\n",hello2.major, hello2.minor);
/*注册字符设备*/
hello2.cdev.owner = hello2_fops.owner;
cdev_init(&hello2.cdev, &hello2_fops);
ret = cdev_add(&hello2.cdev, hello2.devid, HELLO2_COUNT);
return 0;
}
static void __exit hello2_exit(void)
{
printk("hello2_exit\r\n");
/*删除字符设备*/
cdev_del(&hello2.cdev);
/*注销字符设备*/
unregister_chrdev_region(hello2.devid, HELLO2_COUNT);
}
/*
*
*模块入口与出口函数
*
*/
module_init(hello2_init);
module_exit(hello2_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jiaozhu");
3.不论使用哪种方式Makefile文件的内容基本一样,只需要更改一下‘obj-m’对应的驱动文件即可,hell_demo2项目的工程如下所示
Makefile文件
KERNELDIR := /home/xfg/linux/imx_6ull/i2x_6ub/system_file/i2SOM-iMX-Linux
CURRENT_PATH := $(shell pwd)
obj-m := hello_demo2.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
为了方便测试,在内核中使用了copy_to_user和copy_from_user函数,因为内核态和用户态之间的空间不能直接访问,所以需要使用这两个函数进行数据的拷贝。
内核空间-->用户空间
unsigned long copy_to_user(void *to, const void *from, unsigned long n)
to:目标地址(用户空间)
from:源地址(内核空间)
n:将要拷贝数据的字节数
用户空间-->内核空间
返回:成功返回0,失败返回没有拷贝成功的数据字节数
unsigned long copy_from_user(void *to, const void *from, unsigned long n)
to:目标地址(内核空间)
from:源地址(用户空间)
n:将要拷贝数据的字节数
返回:成功返回0,失败返回没有拷贝成功的数据字节数
五、测试
将编译好的.ko文件拷贝到arm开发版的/lib/modules/4.1.43+目录下
make
sudo cp hello_demo2.ko /home/rootfs/lib/modules/4.1.43+ -f
启动开发板加载驱动模块
lsmod
modprobe hello_demo2
lsmod
加载结果如下图所示:

成功加载驱动后,使用cat /proc/devices命令查看设备号并创建设备属性节点
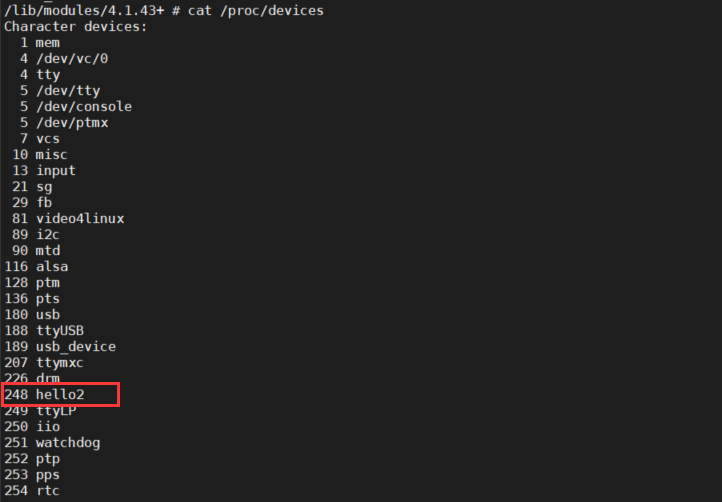
cat /proc/devices
mknod /dev/hello2 c 248 0
创建设备属性节点后会在/dev目录下存在hello2的文件,如下图所示

到此我们的驱动已经编写完成,在下一篇文章中将会编写一个程序对驱动进行验证,有需要的小伙伴下一篇文章见。
六、参考文献
使用register_chrdev_region()系列来注册字符设备:https://www.cnblogs.com/lifexy/p/7827559.html
linux驱动开发--copy_to_user 、copy_from_user函数实现内核空间数据与用户空间数据的相互访问https://blog.csdn.net/xiaodingqq/article/details/80150347
liunx驱动之字符设备的注册的更多相关文章
- linux驱动---字符设备的注册register_chrdev说起
首先我们在注册函数里面调用了register_chrdev(MEM_MAJOR,"mem",&memory_fops),向内核注册了一个字符设备. 第一个参数是主设备号,0 ...
- Linux驱动设计——字符设备驱动(一)
Linux字符设别驱动结构 cdev结构体 struct cdev { struct kobject kobj; struct module *owner; const struct file_ope ...
- 深入浅出:Linux设备驱动之字符设备驱
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面向流 ...
- 【转】深入浅出:Linux设备驱动之字符设备驱动
深入浅出:Linux设备驱动之字符设备驱动 一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据 ...
- 【Linux驱动】字符设备驱动
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 1.字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面 ...
- linux设备驱动之字符设备驱动模型(1)
一:字符设备驱动 在linux下面,应用层看到的一切皆为文件(名字)所有的设备都是文件,都可以调用open,read,write来操作,而在内核中每个中每个设备有唯一的对应一个设备号: APP ( ...
- 蜕变成蝶~Linux设备驱动之字符设备驱动
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面向流 ...
- 深入浅出:Linux设备驱动之字符设备驱动
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面向流 ...
- linux设备驱动之字符设备驱动模型(2)
在上一篇中我们已经了解了字符设备驱动的原理,也了解了应用层调用内核函数的机制,但是我们每次操作设备,都必须首先通过mknod命令创建一个设备文件名,比如说我们要打开u盘,硬盘等这些设备,难道我们还要自 ...
随机推荐
- 常见判断错误 (Day_30)
写给自己的话: 这是一个卡了我小半天的BUG,也是一个很低端的BUG,写篇博客吧,以后回来看看,会发现曾经的自己是如何的菜. 同样,以此记录我的进步 步入正题,这是我实现多条件分页时遇到的一个BUG, ...
- 【玩转PDF】贼稳,产品要做一个三方合同签署,我方了!
一.前言 事情是这个样子的,小农的公司,之前有个功能需要签署来进行一系列的操作,于是我们引入了一个三方平台的签署--上上签,但是有一个比较尴尬的点就是,它不支持合同在浏览器上和附件一起预览的,我们想要 ...
- 在vue中使用prismjs
wqy的笔记:http://www.upwqy.com/details/261.html 作者:wqy 1 首先在项目中安装prismjs插件: cnpm install prismjs -S 2 安 ...
- 域名更换为itwxe.com
域名 uukongjian.com 更换为 itwxe.com,笔名 SunnyBear 更改为 IT王小二. 一.前言 4 月 21 号域名备案通过,开始折腾新买的服务器,本来这篇文章在 5 月 1 ...
- Your branch and 'origin/master' have diverged, and have 1 and 1 different commits each, respectively
On branch master Your branch and 'origin/master' have diverged, and have 1 and 1 different commits e ...
- Step By Step(Lua基础知识)
Step By Step(Lua基础知识) 一.基础知识: 1. 第一个程序和函数: 在目前这个学习阶段,运行Lua程序最好的方式就是通过Lua自带的解释器程序,如: /> l ...
- (转)修改python默认排序方式
在Java中,自定义类可以通过继承comparable接口,重写compareTo方法来使用内置sort()函数来对自定义对象排序,我就在想Python中有没有类似的操作. 首先随便写个自定义类,比如 ...
- Linux下Flash-LED的处理
Linux下Flash-LED的处理 一些LED设备提供两种模式-torch和flash.在LED子系统中,LED类(参见Linux下的LED处理)和LED Flash类,分别支持这些模式.torch ...
- 基于TensorRT 3的自动驾驶快速INT8推理
基于TensorRT 3的自动驾驶快速INT8推理 Fast INT8 Inference for Autonomous Vehicles with TensorRT 3 自主驾驶需要安全性,需要一种 ...
- 编译原理-非确定有穷自动机(nondeterministic finite automata,NFA)
是一个五元组,M=(S,∑,f,S0,F) S:有穷状态集 ∑:输入字母表(有穷) f:f(S,α)=S' 表示从一个状态S出发,识别了一个字α后,可以到达S'这个状态集合之间的某一个状态(可能的后继 ...