FreeRTOS-06-信号量
说明
本文仅作为学习FreeRTOS的记录文档,作为初学者肯定很多理解不对甚至错误的地方,望网友指正。
FreeRTOS是一个RTOS(实时操作系统)系统,支持抢占式、合作式和时间片调度。适用于微处理器或小型微处理器的实时应用。
本文档使用的FreeRTOS版本:FreeRTOS Kernel V10.4.1
参考文档:《FreeRTOS_Reference_Manual_V10.0.0.pdf》《FreeRTOS_Real_Time_Kernel-A_Hands-On_Tutorial_Guide.pdf》《STM32F4 FreeRTOS开发手册_V1.1.pdf》
参考视频:正点原子FreeRTOS手把手教学-基于STM32_哔哩哔哩_bilibili
9 信号量
信号量是操作系统重要的一部分,一般用来进行资源管理和任务同步,FreeRTOS信号量分为二值信号量、计数型信号量、互斥信号量和递归型信号量。
9.1 二值信号量
9.1.1 相关说明
二值信号量通常用于互斥访问或者同步。和互斥信号量的差别:互斥信号量有优先级继承,二值信号量没有优先级继承,所有二值信号量适用于同步,而互斥信号量适用于互斥访问。
和队列一样,信号量API函数允许设置一个阻塞时间,阻塞时间是当任务获得信号的时候由于信号量无效从而导致任务进行阻塞态的最大时钟节拍数,当信号量有效时高优先级任务就会解除阻塞状态。
二值信号量就是只有一个队列项的队列,所以这个队列要么满的,要么空的。二值信号量的工作过程如下:
(1)二值信号量无效,任务阻塞等待信号量
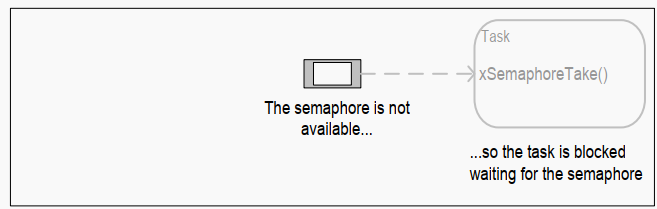
(2)中断发生,释放了信号量
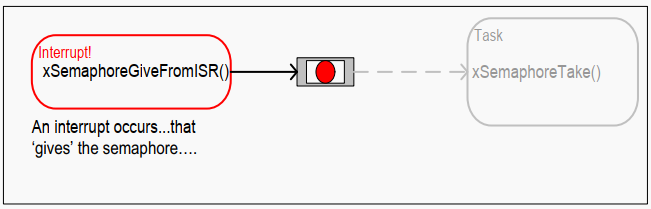
(3)任务获取信号量成功,从阻塞状态解除
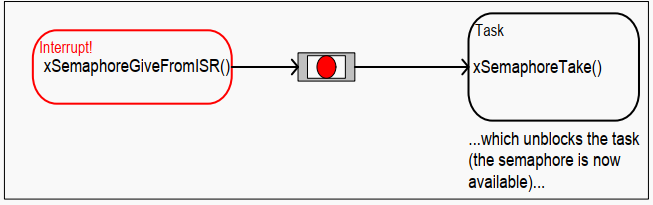
(4)任务再次进入阻塞态,等待信号量

完整的一次流程如下:
9.1.2 相关函数
(1)动态创建信号量
函数原型:
#include "FreeRTOS.h"
#include "semphr.h"
SemaphoreHandle_t xSemaphoreCreateBinary( void );
函数描述:创建一个二值信号量,并返回信号量句柄。每一个信号量需要一个内存空间来存放信号量状态。这个函数的创建的信号量空间由FreeRTOS自动分配。信号量创建之后是空的,任务这时候是无法获得的。
函数参数:无
返回值:NULL:创建失败。其他值:创建成功的二值信号量的句柄
(2)静态创建信号量
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
SemaphoreHandle_t xSemaphoreCreateBinaryStatic( StaticSemaphore_t *pxSemaphoreBuffer );
函数描述:创建一个二值信号量,并返回信号量句柄。每一个信号量需要一个内存空间来存放信号量状态。这个函数的创建的信号量空间由用户指定。信号量创建之后是空的,任务这时候是无法获得的。
函数参数:pxSemaphoreBuffer:指向StaticSemaphore_t类型的变量,这个变量用来保存信号量的状态。
返回值:NULL:创建失败。其他值:创建成功的二值信号量的句柄
(3)任务级释放信号量
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore );
函数描述:释放信号量之前,信号量必须已经被创建了。
函数参数:xSemaphore:要释放的信号量句柄
返回值:pdPASS:信号量释放成功。pdFAIL:信号量释放失败。
(4)中断级释放信号量
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
BaseType_t xSemaphoreGiveFromISR( SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken );
函数描述:中断级释放信号量函数,在中断处理函数中使用。
函数参数:xSemaphore:要释放的信号量句柄;
pxHigherPriorityTaskWoken:标记退出此函数是否进行任务切换,此值为pdTRUE的时候在退出中断函数之前要进行一次任务切换。
返回值:pdPASS:信号量释放成功。errQUEUE_FULL:信号量释放失败,信号量已经被释放了。
(5)任务级获取信号量
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
BaseType_t xSemaphoreTake( SemaphoreHandle_t xSemaphore,
TickType_t xTicksToWait );
函数描述:获取信号量之前,信号量必须已经被创建了。
函数参数:xSemaphore:要获取的信号量句柄;
xTicksToWait:当任务无法获取到信号量,任务最大的保持阻塞的时间。如果为0,任务无法获得信号量时将立即返回。阻塞时间指的时时钟滴答数,所以阻塞的时间大小取决于系统频率,可以使用pdMS_TO_TICKS() 宏来指定阻塞多少毫秒。如果为portMAX_DELAY,任务将一直等待。
返回值:pdPASS:信号量获取成功。pdFAIL:信号量获取失败。
(6)中断级获取信号量
函数原型:
#include “FreeRTOS.h”
#include “queue.h”
BaseType_t xSemaphoreTakeFromISR( SemaphoreHandle_t xSemaphore,
signed BaseType_t *pxHigherPriorityTaskWoken );
函数描述:在中断服务函数中获取信号量。
函数参数:xSemaphore:要获取的信号量句柄;
pxHigherPriorityTaskWoken:标记退出此函数后是否进行任务切换,此值为pdTRUE的时候在退出中断函数之前要进行一次任务切换。
返回值:pdPASS:信号量获取成功。pdFAIL:信号量获取失败。
9.1.3 操作实验
实验目的:使用二值信号量完成任务间的同步
实验设计:任务task00定时释放二值信号量,任务task01获取二值信号量,接收到信号量就进行相应的动作。
测试代码:
/* task00 info */
configSTACK_DEPTH_TYPE Task00_STACK_SIZE = 5;
UBaseType_t Task00_Priority = 1;
TaskHandle_t Task00_xHandle;
/* task01 info */
configSTACK_DEPTH_TYPE Task01_STACK_SIZE = 5;
UBaseType_t Task01_Priority = 2;
TaskHandle_t Task01_xHandle;
//二值信号量
SemaphoreHandle_t BinarySemaphore;
void vTask00_Code(void *para)
{
static unsigned int cnt = 0;
BaseType_t err = pdTRUE;
for (;;)
{
PRINT(" task00 cnt %u...", cnt++);
err = xSemaphoreGive(BinarySemaphore);
if (err != pdTRUE)
PRINT("BinarySemaphore give failed!\n");
vTaskDelay(2000);
}
}
void vTask01_Code(void *para)
{
static unsigned int cnt = 0;
BaseType_t err = pdTRUE;
for (;;)
{
xSemaphoreTake(BinarySemaphore, portMAX_DELAY);
PRINT(" task01 cnt %u...", cnt++);
vTaskDelay(500);
}
}
void test_BinarySemaphore()
{
BinarySemaphore = xSemaphoreCreateBinary();
if (xTaskCreate(vTask00_Code, "task00 task",
Task00_STACK_SIZE, NULL, Task00_Priority,
&Task00_xHandle) != pdPASS)
{
PRINT("creat task00 failed!\n");
}
if (xTaskCreate(vTask01_Code, "task01 task",
Task01_STACK_SIZE, NULL, Task01_Priority,
&Task01_xHandle) != pdPASS)
{
PRINT("creat task01 failed!\n");
}
}
void creat_task(void)
{
test_BinarySemaphore();
// test_queue();
}
编译,运行:
$ ./build/freertos-simulator
task00 cnt 0...
task01 cnt 0...
task00 cnt 1...
task01 cnt 1...
task00 cnt 2...
task01 cnt 2...
可以看出,任务task01等到了信号量之后才会执行。
接着,将获取信号量函数xSemaphoreTake的阻塞时间改为0,也就是没获取到信号量,立即返回。
void vTask01_Code(void *para)
{
static unsigned int cnt = 0;
BaseType_t err = pdTRUE;
for (;;)
{
xSemaphoreTake(BinarySemaphore, 0);
PRINT(" task01 cnt %u...", cnt++);
vTaskDelay(500);
}
}
编译,运行:
$ ./build/freertos-simulator
task01 cnt 0...
task00 cnt 0...
task01 cnt 1...
task01 cnt 2...
task01 cnt 3...
task01 cnt 4...
task00 cnt 1...
可以看出,任务task01不会等待信号量,而是继续执行。
9.1.4 优先级反转
使用二值信号量会出现优先级反转的问题,优先级反转在可剥夺内核中是常见的,但在实时系统中不允许出现这种现象。
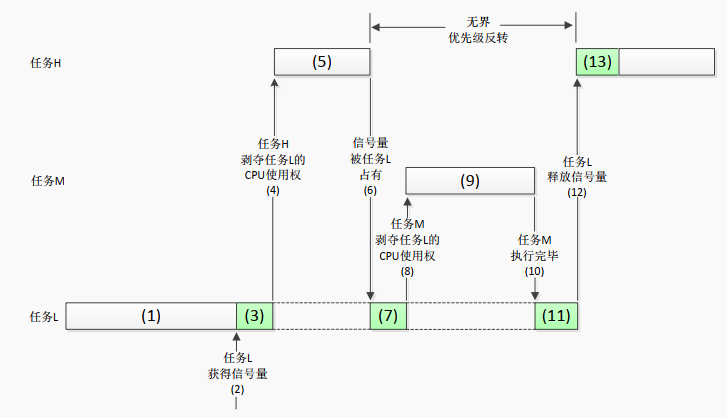
上述图中,高任务H会晚于低优先级任务M执行,这就发生了优先级反转。
优先级反转实验设计:
实验设计:创建三个任务,高优先级任务获取二值信号量,获取成功后进行相应的处理,处理完之后释放信号量;中优先级任务简单运行;低优先级任务和高优先级任务一样,会获取二值信号量,获取成功后进行相应处理。
测试代码:
configSTACK_DEPTH_TYPE TaskLow_STACK_SIZE = 5;
UBaseType_t TaskLow_Priority = 2;
TaskHandle_t TaskLow_xHandle;
configSTACK_DEPTH_TYPE TaskMiddle_STACK_SIZE = 5;
UBaseType_t TaskMiddle_Priority = 3;
TaskHandle_t TaskMiddle_xHandle;
configSTACK_DEPTH_TYPE TaskHigh_STACK_SIZE = 5;
UBaseType_t TaskHigh_Priority = 4;
TaskHandle_t TaskHigh_xHandle;
//二值信号量
SemaphoreHandle_t BinarySemaphore;
void vTaskLow_Code(void *para)
{
static unsigned int times = 0;
BaseType_t err = pdTRUE;
for (;;)
{
xSemaphoreTake(BinarySemaphore, portMAX_DELAY);
PRINT(" low task running");
for (times = 0; times < 20000000; times++)
taskYIELD();
err = xSemaphoreGive(BinarySemaphore);
if (err != pdTRUE)
PRINT("BinarySemaphore give failed!");
vTaskDelay(1000);
}
}
void vTaskMiddle_Code(void *para)
{
for (;;)
{
PRINT(" task middle running");
vTaskDelay(1000);
}
}
void vTaskHigh_Code(void *para)
{
for (;;)
{
vTaskDelay(500);
PRINT(" task high Pend Sem");
xSemaphoreTake(BinarySemaphore, portMAX_DELAY);
PRINT(" task high running!");
xSemaphoreGive(BinarySemaphore);
vTaskDelay(500);
}
}
void test_BinarySemaphore()
{
taskENTER_CRITICAL();
BinarySemaphore = xSemaphoreCreateBinary();
if (BinarySemaphore != NULL)
xSemaphoreGive(BinarySemaphore);
if (xTaskCreate(vTaskLow_Code, "taskLow task",
TaskLow_STACK_SIZE, NULL, TaskLow_Priority,
&TaskLow_xHandle) != pdPASS)
{
PRINT("creat taskLow failed!\n");
}
if (xTaskCreate(vTaskMiddle_Code, "taskMiddle task",
TaskMiddle_STACK_SIZE, NULL, TaskMiddle_Priority,
&TaskMiddle_xHandle) != pdPASS)
{
PRINT("creat taskMiddle failed!\n");
}
if (xTaskCreate(vTaskHigh_Code, "taskHigh task",
TaskHigh_STACK_SIZE, NULL, TaskHigh_Priority,
&TaskHigh_xHandle) != pdPASS)
{
PRINT("creat taskHigh failed!\n");
}
taskEXIT_CRITICAL();
}
void creat_task(void)
{
test_BinarySemaphore();
}
编译、运行:
$ ./build/freertos-simulator
task middle running
low task running
task high Pend Sem
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task middle running
task high running!
task middle running
task high Pend Sem
task high running!
low task running
task middle running
可以看出了优先级反转,中优先级任务比高优先级任务先执行。
9.2 计数型信号量
计数型信号量也叫数值型信号量,其实质是长度大于1的队列。
主要用于两个场景:
1、事件计数:在这个场景中,每次事件发生时就在事件处理函数中释放信号量,其他任务获取信号量来处理事件。这种场合计数型信号量初始计数值为0。
2、资源管理:在这个场景中,信号量代表当前可用的资源数量。一个任务想要获取资源的使用权,必须先获得信号量,信号量获取成功信号量就会减1,当信号量为0时就没有信号量了。当一个任务使用完信号量之后要释放信号量。这个场景中,信号量的初始值就是资源的数量。
9.2.1 相关函数
(1)动态创建函数
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
SemaphoreHandle_t xSemaphoreCreateCounting( UBaseType_t uxMaxCount,
UBaseType_t uxInitialCount );
函数描述:创建一个计数型信号量,返回信号量的句柄。信号量的内存空间由系统指定。
函数参数:uxMaxCount:计数信号量的最大计数值,当信号量值等于这个值的时候释放信号量就会失败。
uxInitialCount:计数信号量初始值。
返回值:NULL:计数信号量创建失败;其他值:计数信号量创建成功,返回计数信号量句柄。
(2)静态创建函数
函数原型:
#include “FreeRTOS.h”
#include “semphr.h”
SemaphoreHandle_t xSemaphoreCreateCountingStatic( UBaseType_t uxMaxCount,
UBaseType_t uxInitialCount,
StaticSemaphore_t pxSempahoreBuffer );
函数描述:创建一个计数型信号量,返回信号量的句柄。信号量的内存空间由用户指定。
函数参数:uxMaxCount:计数信号量的最大计数值,当信号量值等于这个值的时候释放信号量就会失败。
uxInitialCount:计数信号量初始值。
pxSempahoreBuffer:指向StaticSemaphore_t类型的变量,用于保存信号量结构体。
返回值:NULL:计数信号量创建失败;其他值:计数信号量创建成功,返回计数信号量句柄。
(2)释放和获取函数
释放和获取函数和二值信号量的一样,参见9.1.2小节。
9.2.2 操作实验
实验目的:学习计数型信号量的使用方法。
实验设计:主函数中创建一个计数型信号量,计数值为10,初始化计数值为0,然后创建两个任务,任务task00释放信号量,任务task01获取信号量。
测试代码:
/* task00 info */
configSTACK_DEPTH_TYPE Task00_STACK_SIZE = 5;
UBaseType_t Task00_Priority = 1;
TaskHandle_t Task00_xHandle;
/* task01 info */
configSTACK_DEPTH_TYPE Task01_STACK_SIZE = 5;
UBaseType_t Task01_Priority = 3;
TaskHandle_t Task01_xHandle;
//计数型信号量
SemaphoreHandle_t CountSemaphore;
void vTask00_Code(void *para)
{
static unsigned int cnt = 0;
BaseType_t err = pdTRUE;
for (;;)
{
PRINT(" task00 cnt %u...", cnt++);
err = xSemaphoreGive(CountSemaphore);
if (err != pdTRUE)
PRINT("BinarySemaphore give failed!\n");
vTaskDelay(200);
if (cnt == 4)
vTaskDelete(Task00_xHandle);
}
}
void vTask01_Code(void *para)
{
static unsigned int cnt = 0;
BaseType_t err = pdTRUE;
for (;;)
{
xSemaphoreTake(CountSemaphore, portMAX_DELAY);
PRINT(" task01 cnt %u...", cnt++);
vTaskDelay(1000);
}
}
void test_CountSemaphore()
{
CountSemaphore = xSemaphoreCreateCounting(10, 0);
if (xTaskCreate(vTask00_Code, "task00 task",
Task00_STACK_SIZE, NULL, Task00_Priority,
&Task00_xHandle) != pdPASS)
{
PRINT("creat task00 failed!\n");
}
if (xTaskCreate(vTask01_Code, "task01 task",
Task01_STACK_SIZE, NULL, Task01_Priority,
&Task01_xHandle) != pdPASS)
{
PRINT("creat task01 failed!\n");
}
}
void creat_task(void)
{
test_CountSemaphore();
}
编译、运行:
$ ./build/freertos-simulator
task00 cnt 0...
task01 cnt 0...
task00 cnt 1...
task00 cnt 2...
task00 cnt 3...
task01 cnt 1...
task01 cnt 2...
task01 cnt 3...
可以看出,共释放了4个信号量,任务task1执行了4次。
FreeRTOS-06-信号量的更多相关文章
- FreeRTOS 计数信号量
以下转载自安富莱电子: http://forum.armfly.com/forum.php 本章节开始讲解 FreeRTOS 任务间的同步和资源共享机制,计数信号量. FreeRTOS 中计数信号量的 ...
- 嵌入式系统FreeRTOS — 互斥信号量
互斥信号量可以在资源保护的时候很有帮助.用于控制在两个或多个任务间访问共享资源.任务1里面用互斥,那么任务2只能等任务1访问完再访问同一个变量. 比如全局变量double gADC_value[CH_ ...
- stm32中使用cubemx配置freertos的信号量大小
在配置freertos的情况下,cubemx会自动计算每个任务.信号,队列和软件定时器的使用堆栈大小,因此要合理规划 信号量默认是88byte 任务根据设定来计算,我默认配置是128,则最终是624b ...
- FreeRTOS的信号量和互斥量
1. 理解如下,言简意赅的说,信号量解决同步,互斥量解决竞争. 信号量用于同步,主要任务间和中断间同步:互斥量用于互锁,用于保护同时只能有一个任务访问的资源,为资源上一把锁. 互斥量具有优先级继承,信 ...
- FreeRTOS互斥信号量
API函数 #if( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) #define xSemaphoreCreateMutex() xQueueCreateMutex ...
- FreeRTOS 任务计数信号量,任务二值信号量,任务事件标志组,任务消息邮箱
以下基础内容转载自安富莱电子: http://forum.armfly.com/forum.php 本章节为大家讲解 FreeRTOS 计数信号量的另一种实现方式----基于任务通知(Task Not ...
- FreeRTOS 二值信号量,互斥信号量,递归互斥信号量
以下转载自安富莱电子: http://forum.armfly.com/forum.php 本章节讲解 FreeRTOS 任务间的同步和资源共享机制,二值信号量. 二值信号量是计数信号量的一种特殊形式 ...
- FreeRTOS系列第20篇---FreeRTOS信号量API函数
FreeRTOS的信号量包括二进制信号量.计数信号量.相互排斥信号量(以后简称相互排斥量)和递归相互排斥信号量(以后简称递归相互排斥量).我们能够把相互排斥量和递归相互排斥量看成特殊的信号量. 信号量 ...
- STM32 使用 FreeRTOS过程记录
资源:http://blog.csdn.net/zhzht19861011/article/category/6191478 资源:可以下载安富莱的STM32-V5开发版资料中的FreeRTOS教程, ...
- FreeRTOS基础篇教程目录汇总
以下教程(大部分章节)(尤其理论介绍部分)转载自安富莱电子,官网链接: http://forum.armfly.com/forum.php 然后根据安富莱的教程自己做了分析和测试,希望大家共同进步. ...
随机推荐
- Spring-Boot的动态代理AOP原理
前言 Spring AOP使用了动态代理技术,动态代理在业界比较流行的实现方式有,CGLIB,Javassist,ASM等等. Spring动态代理实现方式 Spring采用了JDK和CGLIB两种方 ...
- C++进阶—>带你理解多字节编码与Unicode码
参考网址:https://blog.csdn.net/u011028345/article/details/78516320 多字节字符与宽字节字符 char与wchar_t 我们知道C++基本数据类 ...
- WPF 自己做一个颜色选择器
程序开发过程中,经常会遇到需要支持动态配置主题颜色的问题,通常,一个程序会有多种不同的颜色风格主题供选 有时候,更细致一些的地方,会需要支持自己配置颜色,这样我们就需要一个颜色选择器啦,下面是我自己开 ...
- Windows10 Dev - Background Execution
The Universal Windows Platform (UWP) introduces new mechanisms, which allow the applications to perf ...
- js判断checkbox是否选中 .checked不管用
今天开发遇到一个小问题,记小本本记小本本 document.getElementById("id").checked //正确 //如果返回值为true代表选中 //如果返回值为f ...
- vscode如何配置ts的lint,如何配置才能让eslint和prettier不冲突一键格式化代码(vue开发使用)
最近在使用ts,发觉tslint在vscode上使用很不方便,不如eslint一键格式化高效,就想着能不能配置下vscode让其像写js一样爽 这篇文章主要解决2个问题,第一个是如何让vscode使用 ...
- ORB_SLAM2 Tracking流程
- rasa 如何写一个故事
设计故事 在设计故事时,需要考虑两组对话交互:快乐路径和不快乐路径.快乐路径描述用户何时按照您的预期遵循对话流程,并在出现提示时始终提供必要的信息.然而,用户经常会因为问题.闲聊或其他问题而偏离愉快的 ...
- 分数化循环小数C++实现
引言 前一阵做了一个有理数四则混合运算的程序(详见:用C++实现的有理数(分数)四则混合运算计算器),以分数形式呈现运算结果.这次添加以循环小数形式呈现运算结果的功能.例如: Please input ...
- ❤️用武侠小说的形式来阅读LinkedList的源码,绝了!
一.LinkedList 的剖白 大家好,我是 LinkedList,和 ArrayList 是同门师兄弟,但我俩练的内功却完全不同.师兄练的是动态数组,我练的是链表. 问大家一个问题,知道我为什么要 ...