阅读高翔的RGBD-SLAM博文笔记
高翔的RGBD-SLAM笔记
RGBD相机的特点:
使用RGBD相机中的深度这一维信息,以及相机的针孔成像模型,相机的内参,可以将二维点恢复成三维()
前端VO:
二维的RGB图像则用于视觉里程计Visual Odometry,以连续两帧为例:
对两帧图像做特征点匹配(先分别提取特征,然后计算描述子,根据匹配算法来计算点对之间的匹配距离)
有了匹配点对,可以用ICP 或是PnP 等方法求解相机的变换矩阵T (由旋转矩阵Rotation和平移矩阵Translation组成),也就是相机的位姿估计
一个简单的两帧VO形成,存在问题:
当帧数增多时,如何取舍?
误差会随着时间累积,如何通过回环检测来减少误差累积带来的影响
得到姿态后,可以将其都转到同一坐标系下,且都转为3D点云,拼接,由此可以得到这两帧对应在某个世界坐标系下的地图 (也就是点云拼接)
- 需要注意!!!这里是RGBD SLAM,也就是深度信息是已知的,相当于估计出相机自身的位姿之后,就可以将图像里的观测数据转换成估计的路标点(或是估计的环境内容 属于mapping的内容)
后端优化
引入姿态图,G = {V, E}
最简单情况下,节点V代表相机的各个时刻的姿态,而边指的是两个节点之间的变换
- 可以理解成,节点 $v_1 = T_1 = T_{world->frame1} $, 而边 \(e_{12} = T_{12} = T_{frame1->frame2}\)
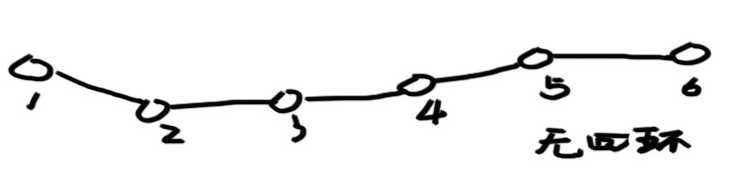
在VO中,姿态图是链状结构
但是如果是存在回环,则由于存在误差,使得所有的边给出的数据并不一致【比如 T13 * X1 不等于 T23 * X2 】

由此,可以优化一个不一致性误差:
\[
\min E = \sum_{i,j} ||x_i^*-T_{i,j} x_j^*||^2_2
\]
这里的 \(x_i^*\) 表示 \(x_i\) 的估计值,也就是随机或指定一个初始值 然后通过优化算法不断迭代更新的
关键帧的提取
把每一帧都拼到地图里面比较耗费时间与空间,因为帧间距离很近(时间间隔短)
所以只把关键帧拼到地图里。具体来说,对于新来的帧,将其和当前所有关键帧的最后一帧匹配,估计一下从关键帧到新帧的变换矩阵:
如果变换较小 则认为离前一个关键帧很近,丢弃;
如果变换太大,可能是计算错误;
如果匹配点较少则说明该帧图像质量不高;
剩下的情况是,特征匹配成功,运动估计正确,同时又离上一个关键帧有一定距离,则认为是新的关键帧
最后再将新的关键帧加入后端优化的过程:检测回环、加入姿态图优化、拼接点云地图
回环的检测
回环的本质是识别曾经到过的地方。
最简单的回环检测策略,就是把新来的关键帧与之前所有的关键帧进行比较,不过这样会导致越往后,需要比较的帧越多。所以,稍微快速一点的方法是在过去的帧里随机挑选一些,与之进行比较。更进一步的,也可以用图像处理/模式识别的方法计算图像间的相似性,对相似的图像进行检测。
阅读高翔的RGBD-SLAM博文笔记的更多相关文章
- 视觉SLAM实战(一):RGB-D SLAM V2
写在前面 首先打个广告.SLAM研究者交流QQ群:254787961.欢迎各路大神和小白前来交流. 看了前面三篇博文之后,是不是有同学要问:博主你扯了那么多有用没用的东西,能不能再给力一点,拿出一个我 ...
- 阅读《LEARNING HARD C#学习笔记》知识点总结与摘要三
最近工作较忙,手上有几个项目等着我独立开发设计,所以平时工作日的时候没有太多时间,下班累了就不想动,也就周末有点时间,今天我花了一个下午的时间来继续总结与整理书中要点,在整理的过程中,发现了书中的一些 ...
- ROS_RGB-D SLAM学习笔记--室内环境测试
ROS_RGB-D SLAM学习笔记 RTAB-Map's ros-pkg. RTAB-Map is a RGB-D SLAM approach with real-time constraints. ...
- 一起做RGB-D SLAM(7) (完结篇)
第七讲 添加回环检测 2016.11 更新 把原文的SIFT替换成了ORB,这样你可以在没有nonfree模块下使用本程序了. 回环检测的阈值作出了相应的调整. 请以现在的github上源码为准. 简 ...
- 三维重建7:Visual SLAM算法笔记
VSLAM研究了几十年,新的东西不是很多,三维重建的VSLAM方法可以用一篇文章总结一下. 此文是一个好的视觉SLAM综述,对视觉SLAM总结比较全面,是SLAM那本书的很好的补充.介绍了基于滤波器的 ...
- 阅读《LEARNING HARD C#学习笔记》知识点总结与摘要系列文章索引
从发表第一篇文章到最后一篇文章,时间间隔有整整一个月,虽只有5篇文章,但每一篇文章都是我吸收<LEARNING HARD C#学习笔记>这本书的内容要点及网上各位大牛们的经验,没有半点废话 ...
- 阅读《LEARNING HARD C#学习笔记》知识点总结与摘要二
今天继续分享我的阅读<LEARNING HARD C#学习笔记>知识点总结与摘要二,仍然是基础知识,但可温故而知新. 七.面向对象 三大基本特性: 封装:把客观事物封装成类,并隐藏类的内部 ...
- (1)RGB-D SLAM系列- 工具篇(硬件+关键技术)
/*************************************************************************************************** ...
- 一起做RGB-D SLAM 第二季 (一)
小萝卜:师兄!过年啦!是不是很无聊啊!普通人的生活就是赚钱花钱,实在是很没意思啊! 师兄:是啊…… 小萝卜:他们都不懂搞科研和码代码的乐趣呀! 师兄:可不是嘛…… 小萝卜:所以今年过年,我们再做一个S ...
随机推荐
- http与Rpc
RPC即远程服务调用 出现原因:随着项目越来越大,访问量越来越大,为了突破性能瓶颈,需要将项目拆分成多个部分,这样比起传统的项目都是本地内存调用,分布式的项目之间需要在网络间进行通信 服务之间的远程调 ...
- Node.js中的模块接口module.exports
在写node.js代码时,我们经常需要自己写模块(module).同时还需要在模块最后写好模块接口,声明这个模块对外暴露什么内容.实际上,node.js的模块接口有多种不同写法.在此做了个简单的总结. ...
- 安装Rtools
1.好多工具需要安装Rtools install.packages("installr") install.packages("stringr") ###依赖包 ...
- JVMTIAgent
JVMTIAgent其实就是一个动态库,利用JVMTI暴露出来的一些接口来干一些我们想做但是正常情况下又做不到的事情,不过为了和普通的动态库进行区分,它一般会实现如下的一个或者多个函数: 1 2 3 ...
- 03Shell条件测试
条件测试 Shell 条件测试 格式 1: test 条件表达式 格式 2: [ 条件表达式 ] 格式 3: [[ 条件表达式 ]] 具体参数说明可以通过 man test 进行查看 文件测试 [ 操 ...
- DDR基础知识
1.前言 DDR的全称为Double Data Rate SDRAM,也就是双倍速率的SDRAM,SDRAM在一个CLK周期传输一次数据,而DDR在一个CLK周期传输两次数据,分别在上升沿和下降沿各传 ...
- 一段完整的创建表格的SQL代码
一段完整的创建表格的SQL代码 使用SQL语句创建一张表,不仅可以可以快速熟悉SQL语句,还可以从这看出一个人对该技能点的熟悉程度. 这里先说明几点: PRIMARY KEY:主键,一张表中只允许有一 ...
- pymysql 读取大数据内存卡死的解决方案
背景:目前表中只有5G(后期持续增长),但是其中一个字段(以下称为detail字段)存了2M(不一定2M,部分为0,平均下来就是2M),字段中存的是一个数组,数组中存N个json数据.这个字段如下: ...
- vuex 源码分析(七) module和namespaced 详解
当项目非常大时,如果所有的状态都集中放到一个对象中,store 对象就有可能变得相当臃肿. 为了解决这个问题,Vuex允许我们将 store 分割成模块(module).每个模块拥有自己的 state ...
- V2Ray+WebSocket+TLS+Nginx 配置及使用
v2ray 是一个模块化的代理工具,支持 VMess,Socks,HTTP,Shadowsocks 等等协议,并且附带很多高级功能,HTTP,TLS 等等. 关键词限制,全文 v2ray 中的 y 为 ...