OpenCV学习(15) 细化算法(3)
本章我们学习一下Hilditch算法的基本原理,从网上找资料的时候,竟然发现两个有很大差别的算法描述,而且都叫Hilditch算法。不知道那一个才是正宗的,两个算法实现的效果接近,第一种算法更好一些。
第一种算法描述参考paper和代码:
Linear Skeletons from Square Cupboards
Speedup Method for Real-Time Thinning Algorithm
http://cis.k.hosei.ac.jp/~wakahara/Hilditch.c
第二种算法描述参考资料:
http://cgm.cs.mcgill.ca/~godfried/teaching/projects97/azar/skeleton.html#algorithm
下面我们分别看一下这两种算法描述:
一、第一种算法描述
假设当前被处理的像素为p0,我们使用下图所示的8邻域表示方式。
我们处理的为二值图像,背景为黑色,值为0,要细化的前景物体像素值为255。
对于Hilditch算法来说,它并不是一个完全的并行算法,而是串行并行相结合。当前像素是否是能够删除的骨架点,不仅是由它周围的8邻域决定,而且和前面像素的判定结果有关。一个像素判定为可以删除,我们并不直接删除它,而是在目地图像中设置像素值为GRAY=128,这个信息可能会影响之后其它像素的判定。
当图像一次扫描迭代完成后,我们把所有置为GRAY的像素设置为0,从而删除它。
算法的描述如下。
迭代扫描当前图像
对于当前像素点,扫描它的8邻域,如果邻域的像素值为255,则b[i]=1(i=0…8),像素值为128(GRAY,表示该像素点在前面的循环中被标记为删除),b[i]=-1,如果像素值为0,则b[i]=0。
下面会根据b[i]的值进行6个条件判断,如果条件满足,则会标记该像素值为GRAY(128)。
1. b[0]=1,即当前像素必须为前景点。
2. 1-abs(b1) + 1 – abs(b3) + 1 – abs(b5) + 1 – abs(b7) >= 1,该条件表示当前像素为边界点,即东西南北四个点至少有一个b[i]=0。
3. abs(b1)+…+abs(b8)>=2, 该条件表示不能删除端点,即p0点周围只有一个点为1或-1的情况。
4. 统计b1到b8等于1的数量,该数量值必须大于1,该条件表示不能删除端点。、
5. 连通性检测,使用下面的公式:首先根据当前像素周围3*3域的值,记录d[9]数组,如果b[i]等于0,则d[i]=0, 否则d[i]=1,最后计算 d1-d1*d2*d3+d3-d3*d4*d5+d5-d5*d6*d7+d7-d7*d8*d1是否为1,为1则满足连通性,可以删除。
6.最后一个条件保证当轮廓是2个像素宽时,只删除一边。统计sum的值,当值为8时候,可以删除。
sum = 0;
for (i = 1; i <= 8; i++)
{
if (b[i] != -1)
{
sum++;
} else
{
copy = b[i];
b[i] = 0;
if (func_nc8(b) == 1) sum++;
b[i] = copy;
}
当这6个条件都满足时候,标记当前像素值为GRAY(128),然后在判断别的像素。当所有像素都扫描一遍后,完成一次迭代。
此时我们会把刚才标记为GARY的像素,都设置为0,真正的删除它,如果上一次循环已经没有标记删除的像素,则退出迭代,否则进行下一次迭代。
算法代码:
int gThin::func_nc8(int *b)
//端点的连通性检测
{
int n_odd[4] = { 1, 3, 5, 7 }; //四邻域
int i, j, sum, d[10]; for (i = 0; i <= 9; i++) {
j = i;
if (i == 9) j = 1;
if (abs(*(b + j)) == 1)
{
d[i] = 1;
}
else
{
d[i] = 0;
}
}
sum = 0;
for (i = 0; i < 4; i++)
{
j = n_odd[i];
sum = sum + d[j] - d[j] * d[j + 1] * d[j + 2];
}
return (sum);
} void gThin::cvHilditchThin(cv::Mat& src, cv::Mat& dst)
{
if(src.type()!=CV_8UC1)
{
printf("只能处理二值或灰度图像\n");
return;
}
//非原地操作时候,copy src到dst
if(dst.data!=src.data)
{
src.copyTo(dst);
} //8邻域的偏移量
int offset[9][2] = {{0,0},{1,0},{1,-1},{0,-1},{-1,-1},
{-1,0},{-1,1},{0,1},{1,1} };
//四邻域的偏移量
int n_odd[4] = { 1, 3, 5, 7 };
int px, py;
int b[9]; //3*3格子的灰度信息
int condition[6]; //1-6个条件是否满足
int counter; //移去像素的数量
int i, x, y, copy, sum; uchar* img;
int width, height;
width = dst.cols;
height = dst.rows;
img = dst.data;
int step = dst.step ;
do
{ counter = 0; for (y = 0; y < height; y++)
{ for (x = 0; x < width; x++)
{ //前面标记为删除的像素,我们置其相应邻域值为-1
for (i = 0; i < 9; i++)
{
b[i] = 0;
px = x + offset[i][0];
py = y + offset[i][1];
if (px >= 0 && px < width && py >= 0 && py <height)
{
// printf("%d\n", img[py*step+px]);
if (img[py*step+px] == WHITE)
{
b[i] = 1;
}
else if (img[py*step+px] == GRAY)
{
b[i] = -1;
}
}
}
for (i = 0; i < 6; i++)
{
condition[i] = 0;
} //条件1,是前景点
if (b[0] == 1) condition[0] = 1; //条件2,是边界点
sum = 0;
for (i = 0; i < 4; i++)
{
sum = sum + 1 - abs(b[n_odd[i]]);
}
if (sum >= 1) condition[1] = 1; //条件3, 端点不能删除
sum = 0;
for (i = 1; i <= 8; i++)
{
sum = sum + abs(b[i]);
}
if (sum >= 2) condition[2] = 1; //条件4, 孤立点不能删除
sum = 0;
for (i = 1; i <= 8; i++)
{
if (b[i] == 1) sum++;
}
if (sum >= 1) condition[3] = 1; //条件5, 连通性检测
if (func_nc8(b) == 1) condition[4] = 1; //条件6,宽度为2的骨架只能删除1边
sum = 0;
for (i = 1; i <= 8; i++)
{
if (b[i] != -1)
{
sum++;
} else
{
copy = b[i];
b[i] = 0;
if (func_nc8(b) == 1) sum++;
b[i] = copy;
}
}
if (sum == 8) condition[5] = 1; if (condition[0] && condition[1] && condition[2] &&condition[3] && condition[4] && condition[5])
{
img[y*step+x] = GRAY; //可以删除,置位GRAY,GRAY是删除标记,但该信息对后面像素的判断有用
counter++;
//printf("----------------------------------------------\n");
//PrintMat(dst);
}
}
} if (counter != 0)
{
for (y = 0; y < height; y++)
{
for (x = 0; x < width; x++)
{
if (img[y*step+x] == GRAY)
img[y*step+x] = BLACK; }
}
} }while (counter != 0); }
二、第二种算法描述
第二种算法描述和Zhang的并行算法很相似,特别是前2个条件一模一样,不同的是3,4两个条件,还有就是该描述算法并没有像zhang算法那样,把一次迭代分成2个阶段。
此时我们使用的8邻域标记为:
下面看下它的算法描述:
复制目地图像到临时图像,对临时图像进行一次扫描,对于不为0的点,如果满足以下四个条件,则在目地图像中删除该点(就是设置该像素为0)
a. 2<= p2+p3+p4+p5+p6+p7+p8+p9<=6
大于等于2会保证p1点不是端点或孤立点,因为删除端点和孤立点是不合理的,小于等于6保证p1点是一个边界点,而不是一个内部点。等于0时候,周围没有等于1的像素,所以p1为孤立点,等于1的时候,周围只有1个灰度等于1的像素,所以是端点(注:端点是周围有且只能有1个值为1的像素)。

b. p2->p9的排列顺序中,01模式的数量为1,比如下面的图中,有p2p3 => 01, p6p7=>01,所以该像素01模式的数量为2。

之所以要01模式数量为1,是要保证删除当前像素点后的连通性。比如下面的图中,01模式数量大于1,如果删除当前点p1,则连通性不能保证。

c. p2.p4.p8 = 0 or A(p2)!=1,A(p2)表示p2周围8邻域的01模式和。这个条件保证2个像素宽的垂直条不完全被腐蚀掉。
d.p2.p4.p6 = 0 or A(p4)!=1,A(p4)表示p4周围8邻域的01模式和。这个条件保证2个像素宽的水平条不完全被腐蚀掉。
算法代码:
void gThin::cvHilditchThin1(cv::Mat& src, cv::Mat& dst)
{
//http://cgm.cs.mcgill.ca/~godfried/teaching/projects97/azar/skeleton.html#algorithm
//算法有问题,得不到想要的效果
if(src.type()!=CV_8UC1)
{
printf("只能处理二值或灰度图像\n");
return;
}
//非原地操作时候,copy src到dst
if(dst.data!=src.data)
{
src.copyTo(dst);
} int i, j;
int width, height;
//之所以减2,是方便处理8邻域,防止越界
width = src.cols -2;
height = src.rows -2;
int step = src.step;
int p2,p3,p4,p5,p6,p7,p8,p9;
uchar* img;
bool ifEnd;
int A1;
cv::Mat tmpimg;
while(1)
{
dst.copyTo(tmpimg);
ifEnd = false;
img = tmpimg.data+step;
for(i = 2; i < height; i++)
{
img += step;
for(j =2; j<width; j++)
{
uchar* p = img + j;
A1 = 0;
if( p[0] > 0)
{
if(p[-step]==0&&p[-step+1]>0) //p2,p3 01模式
{
A1++;
}
if(p[-step+1]==0&&p[1]>0) //p3,p4 01模式
{
A1++;
}
if(p[1]==0&&p[step+1]>0) //p4,p5 01模式
{
A1++;
}
if(p[step+1]==0&&p[step]>0) //p5,p6 01模式
{
A1++;
}
if(p[step]==0&&p[step-1]>0) //p6,p7 01模式
{
A1++;
}
if(p[step-1]==0&&p[-1]>0) //p7,p8 01模式
{
A1++;
}
if(p[-1]==0&&p[-step-1]>0) //p8,p9 01模式
{
A1++;
}
if(p[-step-1]==0&&p[-step]>0) //p9,p2 01模式
{
A1++;
}
p2 = p[-step]>0?1:0;
p3 = p[-step+1]>0?1:0;
p4 = p[1]>0?1:0;
p5 = p[step+1]>0?1:0;
p6 = p[step]>0?1:0;
p7 = p[step-1]>0?1:0;
p8 = p[-1]>0?1:0;
p9 = p[-step-1]>0?1:0;
//计算AP2,AP4
int A2, A4;
A2 = 0;
//if(p[-step]>0)
{
if(p[-2*step]==0&&p[-2*step+1]>0) A2++;
if(p[-2*step+1]==0&&p[-step+1]>0) A2++;
if(p[-step+1]==0&&p[1]>0) A2++;
if(p[1]==0&&p[0]>0) A2++;
if(p[0]==0&&p[-1]>0) A2++;
if(p[-1]==0&&p[-step-1]>0) A2++;
if(p[-step-1]==0&&p[-2*step-1]>0) A2++;
if(p[-2*step-1]==0&&p[-2*step]>0) A2++;
} A4 = 0;
//if(p[1]>0)
{
if(p[-step+1]==0&&p[-step+2]>0) A4++;
if(p[-step+2]==0&&p[2]>0) A4++;
if(p[2]==0&&p[step+2]>0) A4++;
if(p[step+2]==0&&p[step+1]>0) A4++;
if(p[step+1]==0&&p[step]>0) A4++;
if(p[step]==0&&p[0]>0) A4++;
if(p[0]==0&&p[-step]>0) A4++;
if(p[-step]==0&&p[-step+1]>0) A4++;
} //printf("p2=%d p3=%d p4=%d p5=%d p6=%d p7=%d p8=%d p9=%d\n", p2, p3, p4, p5, p6,p7, p8, p9);
//printf("A1=%d A2=%d A4=%d\n", A1, A2, A4);
if((p2+p3+p4+p5+p6+p7+p8+p9)>1 && (p2+p3+p4+p5+p6+p7+p8+p9)<7 && A1==1)
{
if(((p2==0||p4==0||p8==0)||A2!=1)&&((p2==0||p4==0||p6==0)||A4!=1))
{
dst.at<uchar>(i,j) = 0; //满足删除条件,设置当前像素为0
ifEnd = true;
//printf("\n"); //PrintMat(dst);
}
}
}
}
}
//printf("\n");
//PrintMat(dst);
//PrintMat(dst);
//已经没有可以细化的像素了,则退出迭代
if(!ifEnd) break;
}
}
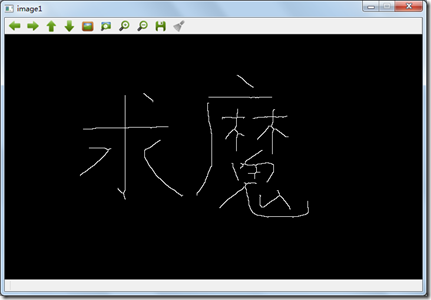
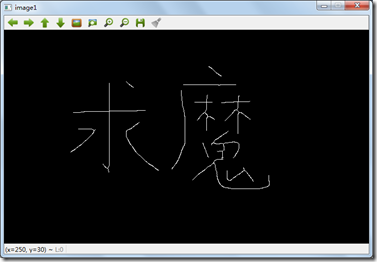
第一种Hilditch算法的结果:
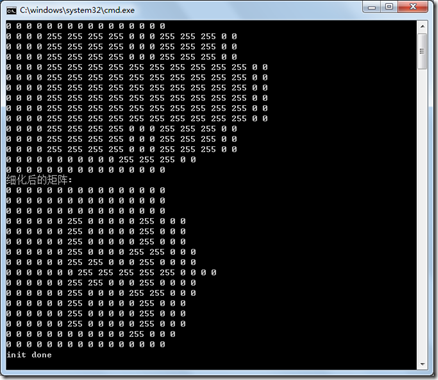
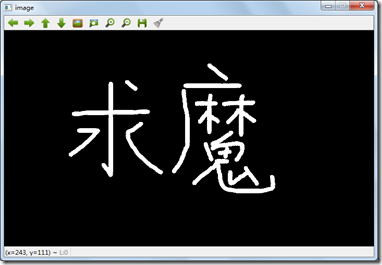
第二种Hilditch算法的结果:
程序代码:工程FirstOpenCV11
OpenCV学习(15) 细化算法(3)的更多相关文章
- OpenCV学习(16) 细化算法(4)
本章我们学习Rosenfeld细化算法,参考资料:http://yunpan.cn/QGRjHbkLBzCrn 在开始学习算法之前,我们先看下连通分量,以及4连通性,8连通性的概念: http://w ...
- OpenCV学习(18) 细化算法(6)
本章我们在学习一下基于索引表的细化算法. 假设要处理的图像为二值图,前景值为1,背景值为0. 索引表细化算法使用下面的8邻域表示法: 一个像素的8邻域,我们可以用8位二进制表示,比如下面的8邻域,表示 ...
- OpenCV学习(17) 细化算法(5)
本章我们看下Pavlidis细化算法,参考资料http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/con ...
- OpenCV学习(14) 细化算法(2)
前面一篇教程中,我们实现了Zhang的快速并行细化算法,从算法原理上,我们可以知道,算法是基于像素8邻域的形状来决定是否删除当前像素.还有很多与此算法相似的细化算法,只是判断的条件不一样. ...
- OpenCV学习(13) 细化算法(1)
程序编码参考经典的细化或者骨架算法文章: T. Y. Zhang and C. Y. Suen, "A fast parallel algorithm for thinning digita ...
- OpenCV学习(19) 细化算法(7)
最后再来看一种通过形态学腐蚀和开操作得到骨架的方法.http://felix.abecassis.me/2011/09/opencv-morphological-skeleton/ 代码非常简单: v ...
- c++opencv中线条细化算法
要达到的效果就是将线条尽量细化成单像素,按照论文上的Hilditch算法试了一下,发现效果不好,于是自己尝试着写了一下细化的算法,基本原理就是从上下左右四个方向向内收缩. 1.先是根据图片中的原则确定 ...
- OpenCV学习(21) Grabcut算法详解
grab cut算法是graph cut算法的改进.在理解grab cut算之前,应该学习一下graph cut算法的概念及实现方式. 我搜集了一些graph cut资料:http://yunpan. ...
- OpenCV学习(9) 分水岭算法(3)
本教程我学习一下opencv中分水岭算法的具体实现方式. 原始图像和Mark图像,它们的大小都是32*32,分水岭算法的结果是得到两个连通域的轮廓图. 原始图像:(原始图像必须是3通道图像) Mark ...
随机推荐
- DOM的查找与操作
<!DOCTYPE html> <html> <head> <meta charset="utf-8" /> <title&g ...
- [BZOJ3150][Ctsc2013]猴子 期望dp+高斯消元
3150: [Ctsc2013]猴子 Time Limit: 20 Sec Memory Limit: 256 MBSec Special JudgeSubmit: 163 Solved: 10 ...
- day4 装饰器深入解析
Python装饰器 装饰器是在不修改源码给代码添加功能的常用方法.@是装饰的标志.我们知道,在给代码增加功能的时候,要遵循开放封闭的原则,不能随便更改原码,因此装饰器的功能就显示出来了,只需要在函数前 ...
- Python 函数系列- Str
Str函数的一些有趣的用法 str = '1234567890' print(str[:]) #取全部字符串 print(str[2]) #取下标是2的字符 -- 3 print(str[:3]) # ...
- 从JDBC看Mybatis的设计
Java数据库连接,(Java Database Connectivity,简称JDBC)是Java语言中用来规范客户端程序如何来访问数据库的应用程序接口,提供了诸如查询和更新数据库中数据的方法. 六 ...
- oracle 查询重复纪录
DELETE FROM xx where aa in(select aa from xx group by aa having count(aa) >1) and rowid in (selec ...
- Windows下Wireshark安装版本选择方式
Windows下Wireshark安装版本选择方式 Wireshark版本分为1.X系列和2.X系列.1.X系列是早期版本,不提供中文版本.2.X系列是新版本,安装后,同时提供中文版和英文版.根据 ...
- FastReport.Net使用:[36]"续表"
1. RepeatedBand的打印和子报表的使用. RepeatedBand实现方法:设置Band为每页重复.注意,从第二次打印开始,就是重复打印了.第一次打印不认为是RepeatedBand. 报 ...
- 【BZOJ 3289】 3289: Mato的文件管理 (莫队)
3289: Mato的文件管理 Time Limit: 40 Sec Memory Limit: 128 MBSubmit: 2819 Solved: 1185 Description Mato同 ...
- [BZOJ2427][HAOI2010]软件安装(Tarjan+DP)
2427: [HAOI2010]软件安装 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 1987 Solved: 791[Submit][Statu ...