<知识整理>2019清北学堂提高储备D5
今天主讲图论。
前言:图的定义:图G是一个有序二元组(V,E),其中V称为顶集(Vertices Set),E称为边集(Edges set),E与V不相交。它们亦可写成V(G)和E(G)。
一、图的存储:
1、邻接矩阵:
2、邻接表:
数组模拟链表实现:记录每条边的终点、边权(如果有的话)、同一起点的上一条边的编号,并记录以每个点为起点的最后一条边的编号。
STL中的vector:记录以每个点为起点的边。

一些vector的细节:
vector 本质就是 c++ 模板库帮我们实现好的可以变长的数组
向一个数组(vector型) a 的末尾加入一个元素 x a.push_back(x)
询问 a 的长度 a.size(),询问a的真实长度a.capacity()
注意:vector 中元素下标从 0 开始,当需要变长时,变长一倍,因此需要额外的内存空间。
深入学习:https://www.cnblogs.com/zhonghuasong/p/5975979.html
代码:
邻接表:
const int N = ;//最多N个点/边
struct edge {
int u, v, w, next;//起点,终点,边权,同起点的上一条边的编号
}edg[N];
int head[N]; //以每个点为起点的最后一条边的编号
int n, m, cnt; //cnt: 边的总数
void add(int u, int v, int w)
{
int e = ++cnt;
edg[e] = (edge){u, v, w, head[u]};
head[u] = e;
}
int main()
{
cin >> n >> m; cnt = ;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, add(u, v, w), odeg[u]++, ideg[v]++;
return ;
}
vector:
#include <bits/stdc++.h>
using namespace std;
const int N = ;
struct edge {
int u, v, w;
};
vector<edge> edg[N];
int n, m, cnt; //cnt: numbers of edges
bool visited[N];
void add(int u, int v, int w)
{
edg[u].push_back((edge){u, v, w});
}
void travel(int u, int distance)//遍历
{
cout << u << " " << distance << endl; visited[u] = true;
for (int e = ; e < edg[u].size(); e++)
if (!visited[edg[u][e].v])
travel(edg[u][e].v, distance + edg[u][e].w);
}
int main()
{
cin >> n >> m; cnt = ;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, add(u, v, w);
return ;
}
二、生成树
最小生成树:给定一个 n 个点 m 条边的带权无向图,求一个生成树,使得生成
树中边权和的最小。
例题引入:

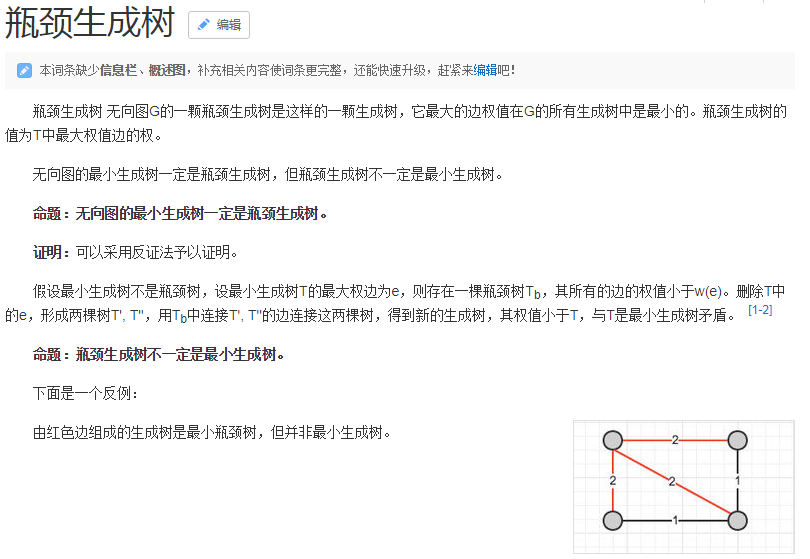
扩展(引用百度百科):
只要求出最小生成树就好了。
求解最小生成树:
生成树的本质:选取若干条边使得任意两点连通。
各种求解算法的本质:贪心
1、Kruskal算法(克鲁斯卡尔算法):
将所有边按边权排好序,从最小的开始枚举:若加入该边后,会形成环(即边的端点已经连通),就忽略掉它,看下一条;否则加入该边,直至得到最小生成树(能得到的话)。查询两点连通情况:并查集。
时间复杂度:O(E log E)
代码:
#include <bits/stdc++.h> using namespace std; const int maxn = ;
struct edge {
int u, v, w;
}edg[maxn];
int n, m, p[maxn], ans = ; bool cmp(edge a, edge b)
{return a.w < b.w;}
int findp(int t)
{return p[t] ? p[t] = findp(p[t]) : t;}
bool merge(int u, int v)
{
u = findp(u); v = findp(v);
if (u == v) return false;
p[u] = v; return true;
}
int main()
{
cin >> n >> m;
for (int i = , u, v, w; i <= m; i++)
cin >> u >> v >> w, edg[i] = (edge){u, v, w};
sort(edg + , edg + m + , cmp); for (int i = ; i <= m; i++)
if (merge(edg[i].u, edg[i].v))
ans = max(ans, edg[i]. w);
cout << ans << endl;
}
2、Prim算法(普里姆算法):
以一点为最小生成树的根,找到一个到该最小连通块边权最小、不在该连通块里的点,并加入到该连通块,直到组成最小生成树。
时间复杂度:O(n2)
代码:
#include<iostream>
#include<cstdio>
#include<cstring>
#define forup(i,n) for(int i=1;i<=n;i++)//偷懒
using namespace std;
int n,m;
int ma[][],bianli=,d[];
bool vis[];
int main()
{
int x,y,z,tot=;
cin>>n>>m;
memset(ma,0x3f,sizeof(ma));//求最短性图论问题一般初始化为一个很大的数
forup(i,m)
{
scanf("%d%d%d",&x,&y,&z);//去重边
if(z<ma[x][y])
ma[x][y]=ma[y][x]=z;
}
vis[]=;
memset(d,0x3f,sizeof(d));
d[]=;
memset(vis,,sizeof(vis));//0蓝1白
int stt_node,stt_dis;
forup(i,n)
{
stt_dis=0x3f3f3f3f,stt_node=;
for(int j=;j<=n;j++)
if(!vis[j]&&d[j]<stt_dis)
{
stt_node=j;
stt_dis=d[j];
}
vis[stt_node]=;
tot+=stt_dis;
for(int j=;j<=n;j++)
if(!vis[j]&&d[j]>ma[j][stt_node])
{
d[j]=ma[j][stt_node];
}
}
cout<<tot;
return ;
}
三、路径
最短路径问题:


最短路径算法本质思想:不断进行松弛操作(更新最短路操作)
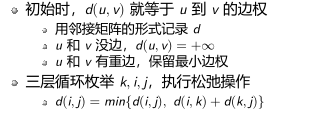
1、Floyd算法(弗洛伊德算法):
正确性:

可求任意两点之间的最短路(多源最短路),时间复杂度O(n);
负权环:

代码:
int d[N][N], n, m;
int main()
{
cin >> n >> m;
for (int i = ; i <= n; i++)
for (int j = ; j <= n; j++) d[i][j] = inf;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, d[u][v] = min(d[u][v], w); for (int k = ; k <= n; k++)
for (int i = ; i <= n; i++)
for (int j = ; j <= n; j++)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
2、Bellman-Ford算法(贝尔曼-福特算法)
单源最短路算法,设源点为S
正确性:
d[u]至少经过1条边,经过几条边,用几条边松弛后就能得到真实值。任意最短路经过不超过 n − 1 条边,n 次松弛足矣。
 因此不适用于有负权环的情况。(n为点数,m为边数)
因此不适用于有负权环的情况。(n为点数,m为边数)
易知Bellman-Ford 算法中,如果 d(u) 在上一次全局更新中没有被更新,那么这一次全局更新中不必松弛 u 的出边(若能更新,上一次就不会不更新)。
代码:
struct edge{
int u, v, w;
}edg[N];
int d[N], n, m, S;
int main()
{
cin >> n >> m >> S;
for (int i = ; i <= n; i++) d[i] = inf;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, edg[i] = (edge){u, v, w};
d[S] = ;
for (int i = ; i <= n; i++)
for (int j = ; j <= m; j++)
{
int u = edg[j].u, v = edg[j].v, w = edg[j].w;
d[v] = min(d[v], d[u] + w);
}
}
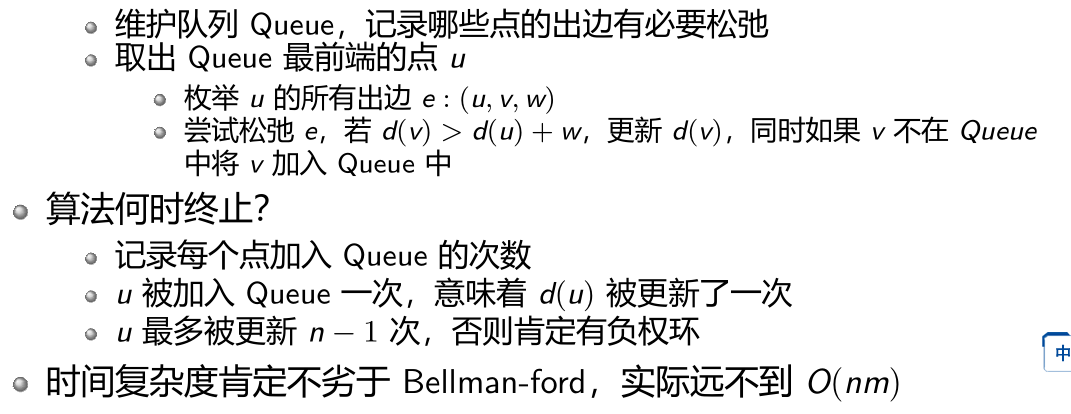
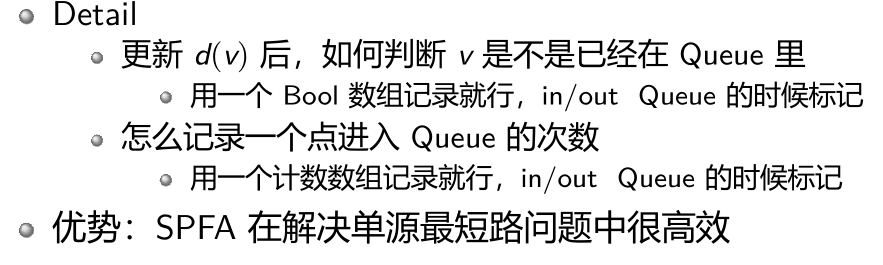
3.SPFA算法(Shortest Path Faster Algorithm 翻译:最短路径快速算法(在一般情况下的确挺快的,只要不被针对))
贝尔曼-福特算法的队列优化形式,通过队列减少了很多冗余的计算,时间复杂度O(kE)(k是小常数,平均值为2)最糟糕的时间复杂度O(VE)(被针对的恐惧)
代码:
struct edge{
int u, v, w;
};
vector<edge> edg[N];
int d[N], n, m, S;
queue<int> Queue;
bool inQueue[N];
int cntQueue[N];
void add(int u, int v, int w)
{
edg[u].push_back((edge){u, v, w});
}
int main()
{
cin >> n >> m >> S;
for (int i = ; i <= n; i++) d[i] = inf;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, add(u, v, w);
d[S] = ; inQueue[S] = true; Queue.push(S);
while (!Queue.empty())
{
int u = Queue.front(); Queue.pop(); inQueue[u] = false;
for (int e = ; e < edg[u].size(); e++)
{
int v = edg[u][e].v, w = edg[u][e].w;
if (d[v] > d[u] + w)
{
d[v] = d[u] + w;
if (!inQueue[v])
{
Queue.push(v); ++cntQueue[v]; inQueue[v] = true;
if (cntQueue[v] >= n) {cout << "Negative Ring" << endl; return ;}//是负权环
}
}
}
}
for (int i = ; i <= n; i++)
cout << d[i] << endl;
}
4.Dijkstra算法( 迪杰斯特拉算法)
一个单源最短路算法。
知道d(u) 被更新成真实值之前,u 出边的松弛操作都无意义。以一个点为源点,设d[i]为i节点到根的最短距离。将d初始化(有与源点连边的为边的边权,否则为很大的数),找到最小的d[i]且i未被确定,将i节点标记为已确定最短路,并更新i节点出边终点的d。重复以上过程至所有点都被确定。
时间复杂度 O(n 2 + m)
代码:
#include <bits/stdc++.h> using namespace std; const int N = 1e5 + ;
const int inf = << ; struct edge{
int u, v, w;
};
vector<edge> edg[N];
int d[N], n, m, S; bool relaxed[N]; void add(int u, int v, int w)
{
edg[u].push_back((edge){u, v, w});
}
int main()
{
cin >> n >> m >> S;
for (int i = ; i <= n; i++) d[i] = inf;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, add(u, v, w); d[S] = ;
for (int i = ; i <= n; i++)
{
int u = ; while (relaxed[u]) ++u;//找到第一个没有被确定的点
for (int j = ; j <= n; j++)//找到d[i]最短且未被确定的i
if (!relaxed[j] && d[j] < d[u]) u = j;
relaxed[u] = true;
for (int e = ; e < edg[u].size(); e++)//进行松弛操作
{
int v = edg[u][e].v, w = edg[u][e].w;
d[v] = min(d[v], d[u] + w);
}
}
for (int i = ; i <= n; i++)
cout << d[i] << endl;
}
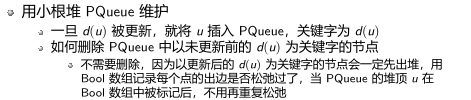
EX:Dijkstra堆优化
利用小根堆的性质节省找到d[i]最小且未被确定的i的时间。
代码:
#include <bits/stdc++.h> using namespace std; const int N = 1e5 + ;
const int inf = << ; struct edge{
int u, v, w;
};
vector<edge> edg[N];
int d[N], n, m, S; bool relaxed[N];
struct Qnode {
int u, du;
bool operator<(const Qnode &v)
const {return v.du < du;}//不加const会出错
};
priority_queue<Qnode> PQueue; void add(int u, int v, int w)
{
edg[u].push_back((edge){u, v, w});
}
int main()
{
cin >> n >> m >> S;
for (int i = ; i <= n; i++) d[i] = inf;
for (int u, v, w, i = ; i <= m; i++)
cin >> u >> v >> w, add(u, v, w); d[S] = ; PQueue.push((Qnode){S, });
while (!PQueue.empty())
{
int u = PQueue.top().u; PQueue.pop();
if (relaxed[u]) continue;
//if edges staring from u are already relaxed, no need to relax again.
relaxed[u] = true;
for (int e = ; e < edg[u].size(); e++)
{
int v = edg[u][e].v, w = edg[u][e].w;
if (d[v] > d[u] + w)
{
d[v] = d[u] + w;
PQueue.push((Qnode){v, d[v]});
//if d(v) is updated, push v into PQueue
}
}
}
for (int i = ; i <= n; i++)
cout << d[i] << endl;
}
三、DAG(有向无环图)
任意一个DAG一定有出度为0的点和入度为0的点。一个DAG删去一点后仍是DAG
1、拓补排序(topsort)
n个点的DAG一定存在拓补序列。
按照有向图中边的起点一定在终点之前的顺序给出一个可行的节点序列(多数不唯一)
换个角度:

实现:
1、
找到 DAG 中入度为 0 的点 u,u 可以放在当前 DAG 拓扑序末尾将 v 和与 v 有关的连边从 DAG 中删除
2、广搜:从入度为
<知识整理>2019清北学堂提高储备D5的更多相关文章
- <知识整理>2019清北学堂提高储备D2
简单数据结构: 一.二叉搜索树 1.前置技能: n/1+n/2+……+n/n=O(n log n) (本天复杂度常涉及) 2.入门题引入: N<=100000. 这里多了一个删除的操作,因此要 ...
- <知识整理>2019清北学堂提高储备D3
全天动态规划入门到入坑... 一.总概: 动态规划是指解最优化问题的一类算法,考察方式灵活,也常是NOIP难题级别.先明确动态规划里的一些概念: 状态:可看做用动态规划求解问题时操作的对象. 边界条件 ...
- <知识整理>2019清北学堂提高储备D4
今天主要讲一下数学的知识. 一.进制转换: 十进制到k进制:短除法:顺除至0,逆序取余. k进制转十进制:乘权相加. 常见进制:四进制(对应2位二进制).八进制(对应3位二进制).十六进制(对应4位二 ...
- <知识整理>2019清北学堂提高储备D1
一.枚举: 枚举是最简单最基础的算法,核心思想是将可能的结果都列举出来并判断是否是解. 优点:思维简单,帮助理解问题.找规律.没头绪时 缺点:时空复杂度较高,会有很多冗余的非解(简单的枚举几乎没有利用 ...
- 清北学堂提高突破营游记day1
上午7点半到的国防宾馆,8点开始的培训. 讲课人林永迪. 没错就是这个人: 他推荐的教辅:刘汝佳紫书,算法导论(也就看看..),刘汝佳白书 先讲模拟.(貌似就是看题论题. 然后贪心. 贪心没有固定的模 ...
- 清北学堂提高组突破营游记day3
讲课人更换成dms. 真的今天快把我们逼疯了.. 今天主攻数据结构, 基本上看完我博客能理解个大概把, 1.LCA 安利之前个人博客链接.之前自己学过QWQ. 2.st表.同上. 3.字符串哈希.同上 ...
- 清北学堂提高组突破营考试T1
题目如下: (想要作弊的后几届神仙们我劝你们还是别黈了,这个题如果你们不会只能证明你们上错班了). 好,题目看完了,发现是一道大模拟(%你)题,于是我们按照题目说的做: #include<ios ...
- 清北学堂提高组突破营游记day6
还有一天就结束了..QWQ 好快啊. 昨天没讲完的博弈论DP: 一个标准的博弈论dp,一般问的是是否先手赢. 博弈论最关键的问题:dp过程. 对于一个问题,一定有很多状态,每个状态可以转移到其他的一些 ...
- 清北学堂提高组突破营游记day5
长者zhx来啦.. (又要送冰红茶了...) zhx一上来就讲动态规划...是不是要逼死人.... 动态规划: 最简单的例子:斐波那契数列.因为他是递推(通项公式不算)的,所以前面的已经确定的项不会影 ...
随机推荐
- 2.proxychains----Macchanger----anonsurf
nano /etc/proxychains.conf 激活dynamic_chain 同是启用proxy_dns 只启用IP会泄露DNS位置信息,别人就知道你在用匿名 ipconfig ifco ...
- python基础--函数1
# 一,为什么使用函数 # 1,可以使代码的组织结构清晰,可读性好 # 2,遇到重复的问题可以直接调用函数 # 3,功能扩展时,可直接修改,而无需每处都进行修改. # 二,函数为何物 # 函数对程序员 ...
- 【Qt开发】Qt Creator在Windows上的调试器安装与配置
Qt Creator在Windows上的调试器安装与配置 如果安装Qt时使用的是Visual Studio的预编译版,那么很有可能就会缺少调试器(Debugger),而使用MSVC的Qt对应的原生调试 ...
- Go语言入门篇-复合数据类型
复合数据类型 主要讨论四种类型——数组.slice.map和结构体 数组和结构体聚合类型 --数组和结构体都是有固定内存大小的数据结构 --数组:由同构的元素组成——每个数组元素都是完全相同的类型 ...
- PHPFPM模式三种运行模式
1.static模式 static模式始终会保持一个固定数量的子进程,这个数量由pm.max_children定义. 2.dynamic模式 子进程的数量是动态变化的,启动时,会生成固定数量的子进 ...
- 20191128 Spring Boot官方文档学习(9.9)
9.9.数据存取 Spring Boot包含许多用于处理数据源的启动器. 9.9.1.配置自定义数据源 要配置自己的DataSource,请在配置中定义该类型的@Bean.Spring Boot可以在 ...
- 为什么你的javascript学了这么久,水平还是烂成了渣?
今年我给公司面试时,面试了百来个人,水平我就呵呵了,还觉得自己学了很久很厉害了,其实呢,渣的很呀,这篇文章送给想学好javascript找份工作的同学们. 首先要说明的是,咱现在不是高手,最多还是一个 ...
- 最大连续和 Easy
Given a sequence a[1],a[2],a[3]......a[n], your job is to calculate the max sum of a sub-sequence. F ...
- some problem
CF1257F Make Them Similar $solution:$ 折半搜索后考虑如何维护两个数组的和,可以将 $A$ 中每个数减 $A_1$ ,$B$ 中每个数被减 $B_1$ ,$map$ ...
- luogu P1399 [NOI2013]快餐店
传送门 注意到答案为这个基环树直径\(/2\) 因为是基环树,所以考虑把环拎出来.如果直径不过环上的边,那么可以在环上每个点下挂的子树内\(dfs\)求得.然后如果过环上的边,那么环上的部分也是一条链 ...