SCNN车道线检测--(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding(论文解读)
Spatial As Deep: Spatial CNN for Traffic Scene Understanding
收录:AAAI2018 (AAAI Conference on Artificial Intelligence)
原文地址:SCNN
论文提出了一个新颖网络Spatial CNN,在图片的行和列上做信息传递。可以有效的识别强先验结构的目标。论文提出了一个大型的车道检测数据集,用于进一步推动自动驾驶发展。
代码:
Abstract
现今的CNN模型通常是由卷积块堆叠构建,虽然CNN有强大的特征提取能力,但现存CNN架构没有足够充分探索图像行和列上的空间关系能力。这些关系对于学习强先验形状的对象很重要,尤其是外观(图像像素)连贯性很弱。例如交通线,车道经常会被遮挡,或者压根就没在路上画车道线。如下图所示:

本文提出了Spatial CNN(CNN),它将传统的卷积层接层(layer-by-layer)的连接形式的转为feature map中片连片卷积(slice-by-slice)的形式,使得图中像素行和列之间能够传递信息。这特别适用于检测长距离连续形状的目标或大型目标,有着极强的空间关系但是外观线索较差的目标,例如交通线,电线杆和墙。论文在车道检测挑战和CityScapes上评估了SCNN的表现,同时SCNN在TuSimple Benchmark lane Detection challenge获得了第一名,准确率为96.53%。
Introduction
自动驾驶中最具挑战的任务之一是交通场景理解,包括计算机视觉任务下的车道检测和语义分割。车道检测帮助指导车辆,语义分割提供更多关于周围环境目标的细节位置。但在实际情况下,因为有许多恶劣条件,这些任务可能非常具有挑战性。对于交通场景理解的另一个挑战是,在许多情况下需要在有强结构先验知识下处理外形线索不多的目标,例如交通线,杆状物等,这些具有长距离连续的形状,常常有很大部分被遮挡。
得益于强大的学习表示能力,CNN将视觉理解推向了一个新的高度。但是这依然不能很好地处理外形线索不多的有强结构先验的目标,而人类可以推断它们的位置并填充遮挡的部分。
为了解决这个问题,论文提出了SCNN,将深度卷积神经网络推广到丰富空间层次。
传统的CNN,任意层接收上层的数据作输入,再作卷积并加激活传给下一层,这个过程是顺序执行的。与之类似的是,SCNN将feature map的行或列也看成layer,也使用卷积加非线性激活,从而实现空间上的深度神经网络。这使得空间信息能够在同层的神经元上传播,增强空间信息进而对于识别结构化对象特别有效。
相关工作:
对于车道检测任务,大多数现有的算法都是依赖于低级手工特征,这让模型难以在恶劣条件下工作。2015年有工作尝试使用深度学习方案用于车道检测,但苦于没有大的广泛的数据集(说这个的原因是论文建立了一个大的数据集~)。对于语义分割,基于CNN的方案的已经成为主流并取得了巨大的成功。
对于在深度神经网络中使用空间信息:有工作使用RNN按每列和行传递信息,但每个像素只能接收同一行或列的信息。也有工作使用LSTM变体探索语义分割的上下文信息,但计算消耗较大。也有工作尝试结合CNN和图模型(例如MRF或CRF),通过大卷积核传递信息。
与上述方案相比,SCNN有如下几个优势:
- 消息传递比传统的MRF/CRF更有计算效率
- 消息传递使用的是残差,这更易训练
- SCNN很灵活,适用于多种深度神经网络
Spatial Convolutional Neural Network
Lane Detection Dataset
本文提出了一个关于交通车道检测的大规模数据集。以前的车道检测数据集(KITTI,CamVid)要不就是太简单,要不就是数据太小。最近的(Caltech,TuSimple)数据集是在交通受限状态下建立的,这样的数据车流量少且路标较为清晰。这些数据集没有包括一些车道线模糊,条件恶劣的情况,而这些情况人类可以推断出来,且这具有很高的实用价值。
论文提出的数据集是由六辆车在北京不同时间录制的,超过55个小时共收集了133,235 张图片,这超过TuSimple 数据集20倍了。论文分成88880张作为训练集, 9675作为验证集,34680做测试集。图像的大小为1640×590。下图是示例和简介:

数据集内包括城市、农村和高速公路等场景,北京作为世界上最大和最拥挤的城市之一,对应的车道检测数据提供了很多具有挑战性的交通场景。论文将测试集分为正常和8个具有挑战性的类别,这对应上图 (a)的9个示例情况。图(b)显示的是挑战性的场景站数据集的比例(共72.3%)。
对于每一张图片,使用三条线注释车道,如前面所述,许多情况下车道是被遮挡的或看不见的。而这在实际情况下是很重要的,车道检测算法需要能够在这种情况下工作。对此,标注工作根据上下文也做了标注,如图(2)(4)所示。对于图(1)的情况我们不对障碍的另一边做标注,将精力集中于最受关注的部分。
Spatial CNN
传统的关于空间关系的建模方法是基于概率图模型的,例如马尔科夫随机场(MRF)或条件随机场(CRF)。最近有工作将概率图与CNN相结合,如图 3(a)所示:

CRF可化为平均场,算法可以用神经网络来实现,具体来说,过程分为:
- 标准化:CNN的输出作为一元势函数,并通过Softmax操作标准化
- 信息传递:可通过大内核的逐通道卷积实现(对于DenseCRF,内核大小将覆盖整张图片,内核权重取决于图片)
- 兼容性转换:使用1×1的卷积实现
- 添加一元势:整个过程迭代N次得到最终输出
可以看到传统方法在传递信息时,每个像素点接受来自全图其他像素的信息,这在计算上是非常昂贵的,难以应用于实时系统。且对于MRF的大卷积核权重很难学。这些方法是应用在CNN的输出上的,论文认为CNN的隐藏层,包含了丰富的空间关系,可更好的用于处理空间关系。
论文提出了Spatial CNN,这里的Spatial不是指Spatial Convolution,而是CNN通过特征的设计架构传递空间信息。SCNN更有效的学习空间关系,能平滑的找出连续的有强先验的结构目标。SCNN的整体架构如下:

(图中SCNN的下标有D,U,R,L,这在结构上是类似的,方向上分别表示为向下,向上,向右,向左)
先以SCNN_D分析:
考虑到SCNN应用在三维张量C×H×W上,C,H,W分别代表通道数,长和宽。为了实现空间信息传递,将张量切分成H片(slice),先将第一片送到尺寸为C×w的卷积层(w为卷积核的宽度)。传统的CNN是将这层的输出传递给下一层,而这里是将这片输出相加到下一片作为新的一片。接着下一片继续应用卷积(这里卷积核共享),直到处理完所有片。

具体来讲,假设我们有一个三维的张量K,其中Ki,j,k记为最后一片中通道i的元素和当前片中通道j的元素之间的权重,这两个元素之间偏移为k列。同样的将Xi,j,k记录为张量X的元素,其中i,j,k分别指代通道,行,列.
则SCNN的前向计算为:
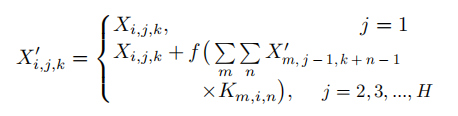
其中f是非线性激活函数ReLU。X加′′表示更新后的值,注意所有的片共享一组卷积核,SCNN是一种RNN。
Analysis
SCNN相比于传统方法,有三个优势:
计算效率
SCNN与传统的Dense MRF/CRF相比,在信息传递方向不同,示意图如下所示:

- 图(a):MRF/CRF中每个像素点会直接接收其他所有像素点的信息(大卷积核实现),这其中有许多冗余计算。
- 图(b):在SCNN中,信息是顺序传递的。
假设张量有H行W列,对于密集的MRF/CRF来讲,在每两个HW像素之间都存在信息传递,对于niter次迭代,传递了niterW2H2次信息。在SCNN中,每个像素只接受来自w个像素的信息,共传递了nderWH次,其中der指代传递信息的方向的数量,w为卷积核宽度。
niter范围在10到100之间,在本文中ndir设置为4,对应着四个方向。w设置通常不超过10(图中设置为3)。对于一张有上千行和列的图片来说,SCNN可大幅度减少计算量,而每个像素点依旧能够接收来所有其他像素传递的信息(4个方向的信息传递)。
将传递信息作残差
密集的MRF/CRF内是通过所有加权像素相加,这样的计算花费很大。而RNN是通过梯度来优化的, 考虑到这么多层和列,依据残差网络的经验,论文也采用残差的方式来学习(计算公式描述的残差学习)。这种残差可认为是对原始神经元的修正。实验证明这样的消息传递比基于LSTM的要好。
灵活性
归功于SCNN的计算效率,它可以很方便的集成到CNN的任何部分。通常 top hidden layer 包含了丰富的语义信息,这是应用SCNN的理想位置。在完整的SCNN模型中我们在顶层的 feature map上用了四个方向的SCNN引入空间信息传递。
Experiment
论文在自发布的lane detection dataset 和 CityScapes数据集做了评估。
采用标准的SGD训练器,学习率采用”poly”策略,初始学习率为0.01,power为0.9。batchsize设置为12,动量为0.9,权重衰减为0.0001。迭代次数为60K。模型架构在LargeFOV(DeepLabv2)基础上修改,初始的13层采用的是在ImageNet上预训练的VGG16层。所有的实验使用的工作是Torch7.
Lane Detection
普通的目标识别只要划分边界,而车道检测需要精准的预测曲线,一个自然的想法是模型输出曲线的概率图,以像素级目标来训练网络,这类似于语义分割任务。我们希望网络能够直接区分不同车道标记,这样鲁棒性更好。共有4中类型的车道线。输出的概率图经过一个小网络预测车道标记是否存在。
在测试期间,同样需要从概率图转为曲线,模型大致示意如下图(b)所示:

对于存在值大于0.5的车道标记,在对应的概率图每20行搜索以获得最高的响应位置,然后通过三次样条函数连接这些点(cubic splines)。这就是最终的预测。
上图(a)显示了baseline和LargeFOV之间的差异:
fc7输出通道为128fc6扩张卷积的扩张率为4- 每个ReLU层前加了BN层
- 添加了一个小型网络用于预测是否存在车道线
训练时,输入和输出的图片分辨率设置为800×288(约为原图的二分之一)。目标线的宽度设置为16.考虑背景和车道标记之间的不平衡标签,背景损失乘以0.4。
评估
为了判断车道标记是否正确的检测到,论文将车道标记视为宽度为30像素的线,计算ground truth和预测值之间的IoU.如果预测的IoU大于某个阈值,则认为是true positives (TP). 如下图6所示,这里设置了0.3和0.5作为阈值,分别对应松散和严格的评估。

然后使用

最为最终评价指标,其中Precision=TPTP+FP,Recall=TPTP+FN。设置β=1表示调和平均值。
Ablation Study
Effectiveness of multidirectional SCNN
首先探究了SCNN里信息传递方向的有效性。对比实验如下表:

SCNN的核宽度w=5,可以看到随着方向的增加,性能也逐渐增加。 为了证明性能是来源于多方向,而不是参数的增加,在baseline的基础上添加了一个额外的5×5的卷积层,可以看到性能只有微弱的提升。
Effects of kernel width w
论文在SCNN_DURL的基础上测试了不同核宽度对性能的影响,核宽度表示像素可以接收其他像素的信息数量,结果如下:

可以看到较大的w表现出的性能较好(计算量也一直上升)
Spatial CNN on different positions
SCNN可以添加到模型的任何地方,在图3中,将SCNN_DURL应用于output上或top hidden layer:

可以看到放置在top hidden layer后效果要出色,这是因为top hidden layer包含更丰富的信息。
Effectiveness of sequential propagation
在SCNN中,信息时连续方式传递的,SCNN的一片不会传递信息给下一片,知道它接收到别的片传来的信息。与此做对比的时,使用平行策略(parallel),即每个片在更新前将信息传递给一下片,一起更新,结果如下:

可以看到顺序传递的优势较大,这表明在SCNN中,像素不仅受到邻近像素的影响,也受到更远距离的像素影响。
Comparison with state-of-the-art methods
论文将SCNN与几个先进模型对比结果如下:

- 基于LSTM的Renet:使用两个ReNet层替换Figure 3中SCNN层
- DenseCRF:采用了10个平均场迭代
- MRFNet:使用Figure 3(a),迭代10次,内核大小为20
- ResNet:基于与DeepLabv2相同,除了不使用ASPP模块
可以看到SCNN的效果很出色~
可视化结果如下:

可以看到SCNN要比大型的ResNet101要好,虽然ResNet101参数多,但是在这种具有挑战性的情况下会产生杂乱或不连续的输出,SCNN相比能够保持平滑性。这表明SCNN相比于传统CNN能够更好的捕捉强先验结构的目标。
Computational efficiency over other methods
同时论文给出了与其他模型时间效率上的对比。注意计算时间没有包括网络主干。都是在CPU上跑的。

可以看到SCNN比CRF要快很多,这是因为传递信息策略的改变。
Semantic Segmentation on CityScapes
论文同时也在CityScapes上做了测试,使用DeepLabv2的LargeFOV和ResNet101作为baseline,在LargeFOV上添加BN层,对于两个模型,top hidden layer的通道数改为128.
配置SCNN的是SCNN_DURL在w=9w=9,结果如下:

可以看到配置了SCNN的模型,在墙、杆等类别有着显著的提升,这是因为SCNN能够捕捉这些长距离连续物体。
可视化结果如下:

有一个有意思的地方,汽车的底部在训练期间是不做标记的,在LargeFOV上是缺失的,因为SCNN的信息传递,被分类成道路。
论文也将SCNN方法与其他方法做了对比,也使用了VGG16为网络主干,结果如下:

可以看到SCNN效果还是可以的
Conclusion
论文提出了Spatial CNN,在空间层上实现信息的有效传递。SCNN易于融入到其他深度神经网络中做end-2-end训练。论文在车道检测和语义分割上测试了SCNN,结果表现SCNN可以有效的保持长距离连续结构,在语义分割其扩散效应对识别大型物体有利。
此外,论文提出了一个车道检测的数据集,希望能够推动自动驾驶进一步发展。
SCNN车道线检测--(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding(论文解读)的更多相关文章
- 深度学习笔记(十四)车道线检测 SCNN
论文:Spatial As Deep: Spatial CNN for Traffic Scene Understanding 代码:https://github.com/XingangPan/SCN ...
- Lane-Detection 近期车道线检测论文阅读总结
近期阅读的几篇关于车道线检测的论文总结. 1. 车道线检测任务需求分析 1.1 问题分析 针对车道线检测任务,需要明确的问题包括: (1)如何对车道线建模,即用什么方式来表示车道线. 从应用的角度来说 ...
- 深度学习笔记(十二)车道线检测 LaneNet
论文:Towards End-to-End Lane Detection: an Instance Segmentation Approach 代码:https://github.com/MaybeS ...
- opencv车道线检测
opencv车道线检测 完成的功能 图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像 反透视变换:用的是老师给的视频,没有对应的变换矩阵.所以建立二维坐标,通过四点映射的方法计算矩阵,进行反透视 ...
- 3D车道线检测:Gen-LaneNet
3D车道线检测:Gen-LaneNet Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection 论文链接:http ...
- 带你读AI论文丨LaneNet基于实体分割的端到端车道线检测
摘要:LaneNet是一种端到端的车道线检测方法,包含 LanNet + H-Net 两个网络模型. 本文分享自华为云社区<[论文解读]LaneNet基于实体分割的端到端车道线检测>,作者 ...
- Convolutional Patch Networks with Spatial Prior for Road Detection and Urban Scene Understanding
Convolutional Patch Networks with Spatial Prior for Road Detection and Urban Scene Understanding 深度学 ...
- Fauce:Fast and Accurate Deep Ensembles with Uncertainty for Cardinality Estimation 论文解读(VLDB 2021)
Fauce:Fast and Accurate Deep Ensembles with Uncertainty for Cardinality Estimation 论文解读(VLDB 2021) 本 ...
- 语义分割之车道线检测Lanenet(tensorflow版)
Lanenet 一个端到端的网络,包含Lanenet+HNet两个网络模型,其中,Lanenet完成对车道线的实例分割,HNet是一个小网络结构,负责预测变换矩阵H,使用转换矩阵H对同属一条车道线的所 ...
随机推荐
- js window
window对象: browser object mode :bom对象. bom提供了独立于内容而与浏览器窗口进行交互的对象. bom主要用于管理窗口与窗口之间的通讯,因此其核心对象是window ...
- mysql数据库基本操作
下载地址 http://www.mysql.com/downloads/mysql/ 端口号:3306 用户名:root 密码:自定义 连接到MySQL服务器 >mysql -uroot -pr ...
- 帧动画的创建方式 - xml方式
废话不多说,先看东西 创建帧动画1 - xml方式 帧动画的创建方式主要以下2种: * 用xml创建动画: * 用代码创建动画: 本文内容主要关注 xml文件 创建帧动画的方式 xml文件 ...
- java 实现多文件打包下载
jsp页面js代码: function downloadAttached(){ var id = []; id.push(infoid); var options = {}; options.acti ...
- Delphi Web开发连载 --ThinkDelphi (序)
如果把Delphi比作男人,那他曾经独步天下,笑傲江湖过: 如果把Delphi比作女子,那她曾经貌美如花,倾国倾城过! 但那只是历史,那只是曾经, 弹指一挥间,Delphi却似乎英雄迟暮,美人已老.. ...
- express实践(一)
涉及以下这些内容: 主体. cookie.session 数据 模板引擎 服务器基本结构: const express=require('express'); const static=require ...
- 2018年html5入门到精通教程电子书百度云盘下载共22本
名称 查看 <HTML5启动和运行>(HTML5.Up.and.Running)扫描版[PDF] 下载 <Pro HTML5 Performance>(Pro HTML5 Pe ...
- 记录java/javascript让浮点数显示两位小数的方法
参考:http://www.jb51.net/article/46010.htm 另,如果只是要在页面层展示的时候,显示为两位小数,也可以直接改前端js代码. item.turnoverRate = ...
- H5的canvas绘图技术
canvas元素是HTML5中新添加的一个元素,该元素是HTML5中的一个亮点.Canvas元素就像一块画布,通过该元素自带的API结合JavaScript代码可以绘制各种图形和图像以及动画效果. 1 ...
- Maven使用本地jar包(两种方式)
有些项目会用到一些Maven库上没有的jar包,这就需要我们自己引入了 这种情况有两种办法: 第一种方式,在pom文件中引用时使用本地路径: 首先把jar包放到项目中: 然后在pom文件中引入: &l ...