【视觉SLAM14讲】ch3课后题答案
1.验证旋转矩阵是正交矩阵
感觉下面这篇博客写的不错
http://www.cnblogs.com/caster99/p/4703033.html
总结一下:旋转矩阵是一个完美的矩阵——正交矩阵。①行列式为1,②每个列向量都是单位向量且相互正交,③它的逆等于它的转置。
2.罗德里格斯公式的简单推导
http://blog.sina.com.cn/s/blog_ea828d2a0102wlk6.html
罗德里格斯旋转公式是通过反对称矩阵求旋转矩阵的方法,起初我在看别人写的姿态解算分析文章里看到,他的推导如下:
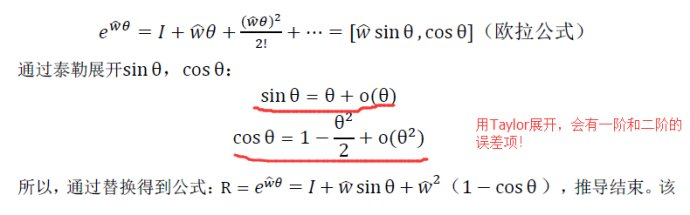
请注意我做标记的地方,我刚开始一直不明白这种推导,这样会有误差的推导,难道罗德里格斯公式是对旋转矩阵R的近似?这样做并不好,反而会使解算的姿态更不准确,后来在群里讨论这个问题,有大神给我解惑了。
首先我们明白这是一个SO(3)到SO(3)的李群的映射。不要担心自己不知道李群是什么,因为我们下面的推导会非常简单!
我们先来看什么是反对称矩阵,在这之前,先展示它和向量叉乘(内积)的关系:

红色三个格子应该是i j k
下面看看我们的反对称矩阵运算:
加一个小三角,就是将这个向量变成一个反对称矩阵
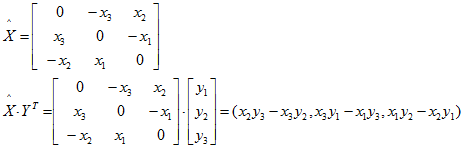
所以我们得出:
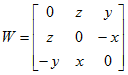
我们知道我们的旋转矩阵R和我们的三角函数的关系,这里就不多说了,所以现在我们来看一个反对称矩阵的性质,首先定义一个反对称矩阵:
同时我们有如下的约束:
现在我们可以看到我们的反对称阵有如下性质:

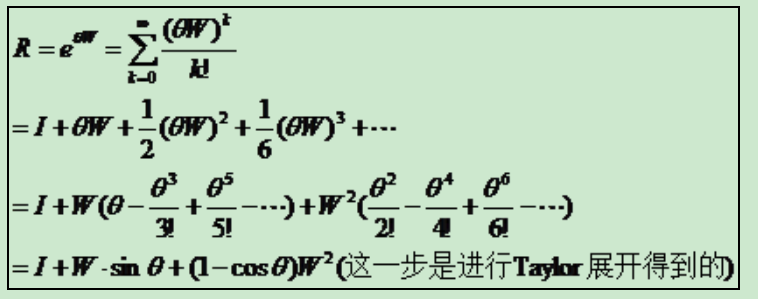
现在可以进行我们的罗德里格斯公式推导了:
3. 验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应 到一个三维空间点(式 3.34)。
=.= 看我干啥?下一题
4.旋转矩阵 轴角 欧拉角 四元数
书上都有
P42 轴角[n,α]与旋转矩阵的关系
P52 轴角[n,α]与四元数的关系
欧拉角存在gimbal lock,不研究他的关系【其实我不会】
5.假设有一个大的eigen矩阵,想把他的左上角的3*3取出来,然后赋值为I3x3
6.Ax = b的Eigen实现
7.
机器人一号和二号,分别在世界坐标系中。
一号的位姿q1=[0.35,0.2,0.3,0.1], t1=[0.3,0.1,0.1]T。
二号的位姿q2=[−0.5,0.4,−0.1,0.2], t2=[−0.1,0.5,0.3]T。
q的第一项是实部,且还未归一化。
已知一号机器人看到某个点,在他的坐标系下是p=[0.5,0,0.2]T, 求在二号机器人坐标系下该点的位置。
- #include <iostream>
- #include <cmath>
- // Eigen 部分
- #include <Eigen/Core>
- // 稠密矩阵的代数运算(逆,特征值等)
- #include <Eigen/Dense>
- //Eigen 几何模块
- #include <Eigen/Geometry>
- using namespace std;
- int main(int argc, char **argv) {
- Eigen::Quaterniond q1(0.35, 0.2, 0.3, 0.1);
- Eigen::Quaterniond q2(-0.5, 0.4, -0.1, 0.2);
- Eigen::Vector3d t1(0.3, 0.1, 0.1);
- Eigen::Vector3d t2(-0.1, 0.5, 0.3);
- Eigen::Vector3d p1(0.5, , 0.2);
- Eigen::Quaterniond q1_one = q1.normalized();
- Eigen::Quaterniond q2_one = q2.normalized();
- //way1
- Eigen::Vector3d v = q1_one.inverse() * (p1 - t1);
- Eigen::Vector3d v2 = q2_one * v + t2;
- cout << "way1 v2 = " << endl << v2 << endl;
- //way2
- Eigen::Matrix3d R1 = Eigen::Matrix3d(q1_one);
- Eigen::Matrix3d R2 = Eigen::Matrix3d(q2_one);
- Eigen::Vector3d v_2 = R1.inverse() * (p1 - t1);
- Eigen::Vector3d v_2_2 = R2 * v_2 + t2;
- cout << "way2 v2= " << endl << v_2_2 << endl;
- return ;
- }
- way1 v2 =
- -0.0309731
- 0.73499
- 0.296108
- way2 v2=
- -0.0309731
- 0.73499
- 0.296108
- *** Exited normally ***
【视觉SLAM14讲】ch3课后题答案的更多相关文章
- c++面向对象程序设计 课后题 答案 谭浩强 第四章
c++面向对象程序设计课后题答案 谭浩强 第四章 1: #include <iostream> using namespace std; class Complex {public: Co ...
- C程序设计(谭浩强)第五版课后题答案 第一章
大家好,这篇文章分享了C程序设计(谭浩强)第五版课后题答案,所有程序已经测试能够正常运行,如果小伙伴发现有错误的的地方,欢迎留言告诉我,我会及时改正!感谢大家的观看!!! 1.什么是程序?什么是程序设 ...
- 使用摄像头或视频运行 ORB-SLAM2 SLAM14讲 第一次课后作业
参考:视觉SLAM十四讲(第一章作业) 深蓝上高博的第一讲课后题: 题目:6 * 使用摄像头或视频运行 ORB-SLAM2(3 分,约 1 小时)请注意本题为附加题.了解⼀样东西最快的⽅式是⾃⼰上⼿使 ...
- 【视觉SLAM14讲】ch4心得与课后题答案【仅供参考】
答案: Q1:验证SO(3) SE(3) Sim(3)关于乘法成群 SO(3) : 由P64最开始可知,乘法代表了旋转,而SO(3)是旋转矩阵的集合, SE(3) Sim(3) 同理(最基础的部分 ...
- javase程序设计课后题答案
;第1章 Java概述 编译java application源程序文件将产生相应的字节码文件,这些字节码文件别的扩展名为.java 执行一个java程序fristapp的方法是运行java frist ...
- c++ primer plus 第七章 课后题答案
#include <iostream> using namespace std; double HAR_AVG(double, double); void TEST(bool); int ...
- c++ primer plus 第六章 课后题答案
#include <iostream> #include <cctype> using namespace std; int main() { char in_put; do ...
- c++ primer plus 第五章 课后题答案
#include <iostream> using namespace std; int main() { ; cout << "Please enter two n ...
- c++ primer plus 第四章 课后题答案
#include<iostream> #include<string> using namespace std; int main() { string first_name; ...
随机推荐
- android build.prop详解
# begin build properties开始设置系统性能 # autogenerated by buildinfo.sh{通过设置形成系统信息} ro.build.id=MIUI(版本ID) ...
- theano提示:g++ not detected的解决办法
导入theano包后出现如下警告: WARNING (theano.configdefaults): g++ not detected ! Theano will be unable to execu ...
- CRC32为例详细解析(菜鸟至老鸟进阶)
CRC-知识解析 cyclic redundancy check 写在前面的话: 之前在做学校项目的时候用到了CRC 原理,但在网上查找的过程中,发现讲解CRC知识的资源很多,但是对新手比较友好的.讲 ...
- LeetCode426.Convert Binary Search Tree to Sorted Doubly Linked List
题目 Convert a BST to a sorted circular doubly-linked list in-place. Think of the left and right point ...
- mysql基础,索引
- JQuery制作网页—— 第三章 JavaScript操作DOM对象
1. DOM:Document Object Model(文档对象模型): DOM操作: ●DOM是Document Object Model的缩 ...
- libvirt笔记(未完待续)
参考源地址:http://libvirt.org/formatdomain.html http://blog.csdn.net/qq250941970/article/details/6022094 ...
- nginx虚拟主机搭建
nginx [engine x]是 Igor Sysoev 编写的一个 HTTP 和反向代理服务器,另外它也可以 作为邮件代理服务器. 它已经在众多流量很大的俄罗斯网站上使用了很长时间,这些网站包括 ...
- PHP使用redis(一)
1,connect 描述:实例连接到一个Redis.参数:host: string,port: int返回值:BOOL 成功返回:TRUE;失败返回:FALSE <?php $redis = ...
- ubuntu安装wine 和sourceinsght
ubuntu安装wine: 1.sudo apt-get update 2.sudo apt-get install wine 安装完成后会在当前用户目录的的家目录下生成.wine目录,该目录就是wi ...