SETTLE约束算法中的坐标变换问题
技术背景
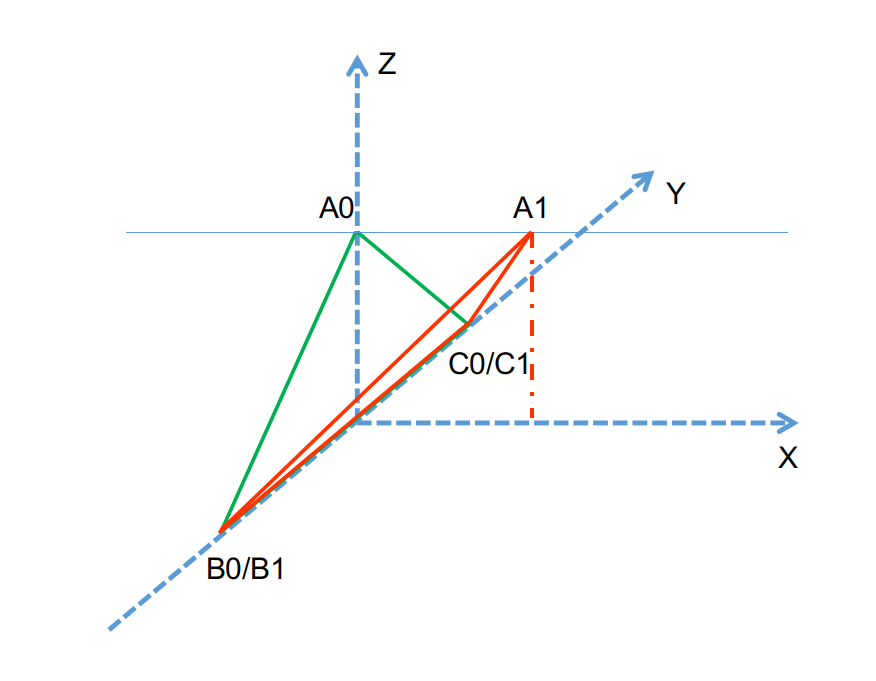
在之前的两篇文章中,我们分别讲解了SETTLE算法的原理和基本实现和SETTLE约束算法的批量化处理。SETTLE约束算法在水分子体系中经常被用到,该约束算法具有速度快、可并行、精度高的优点。本文我们需要探讨的是该约束算法中的一个细节,问题是这样定义的,给定坐标系\(XYZ\)下的两个已知三角形\(\Delta A_0B_0C_0\)和三角形\(\Delta A_1B_1C_1\),以三角形\(\Delta A_0B_0C_0\)构造一个平面\(\pi_0\),将\(\pi_0\)平移到三角形\(\Delta A_1B_1C_1\)的质心位置,作为新坐标系的\(X'Y'\)平面,再使得\(Y'Z'\)平面过\(A_1\)点,以此来构造一个新的坐标系\(X'Y'Z'\),求两个坐标系之间的变换。
理论推导
坐标系\(OXYZ\)和\(O'X'Y'Z'\)之间的变换,只有平移和旋转,没有伸缩。那么关于平移的部分,我们只需要考虑两个原点位置之间的向量差即可。而旋转部分,需要一些技巧,至少我们需要找到三个合适的点用于计算这个旋转矩阵。比如说,假定三角形\(\Delta A_1B_1C_1\)在坐标系\(OXYZ\)和\(O'X'Y'Z'\)之中的位置都是已知的,那么我们就可以按照下述公式来计算旋转矩阵\(R\):
\begin{matrix}
X_A && X_B && X_C\\
Y_A && Y_B && Y_C\\
Z_A && Z_B && Z_C
\end{matrix}
\right]=
\left[
\begin{matrix}
X'_A && X'_B && X'_C\\
Y'_A && Y'_B && Y'_C\\
Z'_A && Z'_B && Z'_C
\end{matrix}
\right]
\]
然后在等式两边各乘上一个逆矩阵就可以得到旋转矩阵:
\begin{matrix}
X'_A && X'_B && X'_C\\
Y'_A && Y'_B && Y'_C\\
Z'_A && Z'_B && Z'_C
\end{matrix}
\right]\left[
\begin{matrix}
X_A && X_B && X_C\\
Y_A && Y_B && Y_C\\
Z_A && Z_B && Z_C
\end{matrix}
\right]^{-1}
\]
然而不幸的是,我们并不能直接得到三角形\(\Delta A_1B_1C_1\)在坐标系\(O'X'Y'Z'\)之中的位置,这需要一些计算。因此,我们可以考虑另辟蹊径,找其他更容易计算的三个向量,用来计算我们所需要的旋转矩阵。
第一个向量
我们找的第一个向量是\(Z'\)轴,或者用向量表示就是\(\vec{O'Z'}=[0, 0, 1]^T\),因为\(Z'\)轴跟平面\(\pi_0\)是垂直的关系,也就是垂直于三角形\(\Delta A_0B_0C_0\)。因此对应的可以用三角形\(\Delta A_0B_0C_0\)的任意两条边的外积来计算向量\(\vec{O'Z'}=R\cdot[\vec{A_0B_0}\times \vec{A_0C_0}]\)(注意做归一化处理)。
第二个向量
如果分别用\(D_1\)和\(D'_1\)来表示三角形\(\Delta A_1B_1C_1\)在坐标系\(OXYZ\)和坐标系\(O'X'Y'Z'\)下的质心位置。这里我们找的第二个向量,就是\(\vec{D'_1A'_1}\)。这里因为\(A'_1\)点在\(Y'Z'\)平面上,因此\(X'_{A'_1}=0\)。而向量\(\vec{D'_1A'_1}\)和\(Z'\)轴的夹角,我们可以在坐标系\(OXYZ\)下计算:
\]
计算出来夹角之后,就可以得到\(\vec{D'_1A'_1}=[0, sin\theta, cos\theta]^T\),即:\(\vec{D'_1A'_1}=R\cdot\vec{D_1A_1}\)。
第三个向量
到这一步为止,其实我们还是没有计算出\(\vec{D'_1B'_1}\)和\(\vec{D'_1C'_1}\)的值,因此我们第三个向量,在前两个向量的基础之上,用叉乘的方法再构造一个\(X'\)轴的向量,即\(\vec{O'X'}=[1, 0, 0]^T\),旋转矩阵计算方法为:
\]
小结
这样一来,我们就得到了三个向量在两个坐标系下的坐标,可以用于建立方程组,计算两个坐标之间的变换关系,如果写成矩阵乘法形式就是:
\begin{matrix}
0&&0&&1\\
0&&\sqrt{1-(\frac{(\vec{A_0B_0}\times \vec{A_0C_0})\cdot\vec{D_1A_1}}{|\vec{A_0B_0}\times \vec{A_0C_0}|\cdot|\vec{D_1A_1}|})^2}&&0\\
1&&\frac{(\vec{A_0B_0}\times \vec{A_0C_0})\cdot\vec{D_1A_1}}{|\vec{A_0B_0}\times \vec{A_0C_0}|\cdot|\vec{D_1A_1}|}&&0
\end{matrix}
\right]\left(\left[
\begin{matrix}
\vec{A_0B_0}\times \vec{A_0C_0}\\
\vec{D_1A_1}\\
(\vec{A_0B_0}\times \vec{A_0C_0})\times \vec{D_1A_1}
\end{matrix}
\right]^{T}\right)^{-1}
\]
代码实现
这里先提一下代码实现和测试的思路。我们首先用Python来构造2个三角形,得到一个新的三角形。然后我们再根据上述的公式,计算得到一个坐标旋转矩阵。最后我们再输入一些便于手动计算的点(或者是直接用前面三角形的三个角,或者是中间的一些向量都是可以的),用旋转矩阵进行变换,来测试一下是否我们所需要的坐标变换之后的结果。
In [1]: import numpy as np
In [2]: T0 = np.array([[0, 0, 1], [0, -1, 0],[0, 1, 0]], np.float32)
In [3]: T1 = np.array([[1, 0, 1], [0, -1, 0], [0, 1, 0]], np.float32)
In [4]: D0 = np.mean(T0, axis=-2)
In [5]: D1 = np.mean(T1, axis=-2)
In [6]: A0B0 = T0[1]-T0[0]
In [7]: A0C0 = T0[2]-T0[0]
In [8]: v0 = np.cross(A0B0, A0C0)
In [9]: v0 /= np.linalg.norm(v0)
In [10]: v1 = T1[0]-D1
In [11]: v1 /= np.linalg.norm(v1)
In [12]: v2 = np.cross(v0, v1)
In [13]: v2 /= np.linalg.norm(v2)
In [14]: M1 = np.vstack((v0, v1, v2))
In [15]: M1 = M1.T
In [16]: iM1 = np.linalg.inv(M1)
In [17]: cost = np.dot(v0, v1)/np.linalg.norm(v0)/np.linalg.norm(v1)
In [18]: M0 = np.array([[0, 0, 1], [0, np.sqrt(1 - cost**2), 0], [1, cost, 0]])
In [19]: R = np.dot(M0, iM1)
In [20]: R
Out[20]:
array([[ 0.00000000e+00, -1.00000000e+00, 0.00000000e+00],
[ 0.00000000e+00, 0.00000000e+00, 9.99999916e-01],
[ 1.00000000e+00, 0.00000000e+00, 5.00651538e-08]])
In [21]: np.dot(R, v0)
Out[21]: array([0., 0., 1.])
In [22]: np.dot(R, v1)
Out[22]: array([0. , 0.70710671, 0.7071068 ])
In [23]: np.dot(R, v2)
Out[23]: array([1., 0., 0.])
In [24]: np.dot(R, T1[0]-D1)
Out[24]: array([0. , 0.66666657, 0.66666666])
In [25]: np.dot(R, T1[1]-D1)
Out[25]: array([ 1. , -0.33333332, -0.33333336])
In [26]: np.dot(R, T1[2]-D1)
Out[26]: array([-1. , -0.33333332, -0.33333336])
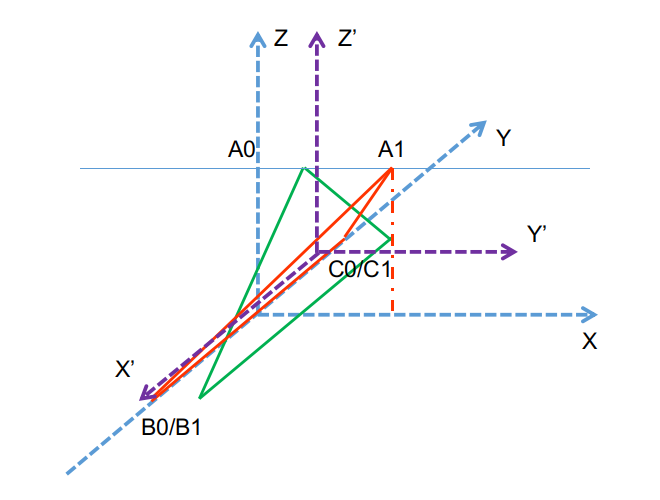
上面这个案例的流程是这样的,我们先创建两个不一样大小的绿色三角形和红色三角形,我们将要做的事情是以绿色三角形为\(X'Y'\)平面,红色三角形的质心为原点,并使得\(Y'Z'\)平面过\(A_1\)点,以此来构造一个新的坐标系,并计算前后两个坐标系之间的变换。
这里需要一些空间想象能力,我们可以先将绿色的三角形平面平移到过红色三角形的质心位置,同时将坐标系原点移动到红色三角形的质心位置,再旋转坐标轴,使得\(Y'Z'\)平面过\(A_1\)点。这样一来通过上一个章节中的旋转矩阵的构造方法,我们就可以计算出所有的向量在两个坐标系下的旋转变换。
当然,需要注意的是,这个变换只是一个旋转变换,由于坐标系发生了平移,所以需要有一个固定的参考点,才能够精确的得到某一个给定的点的坐标变换。比如我们上述python代码中的24、25、26都是对红色三角形的三个顶点关于质心的相对位置的坐标变换,在坐标变换前后,顶点坐标都需要减去质心的坐标。
总结概要
在已知两个三角形顶点坐标的情况下,我们要以其中的一个三角形平面去构造一个新的坐标系,并且需要找到新旧坐标系之间的变换关系。这是一个比较简单的立体几何的问题,寻找两个坐标系之间的变换矩阵。如果是常规思路,可以先根据两个三角形之间的相对位置去计算一下在新坐标系下两个三角形的新的顶点坐标,从而可以取三个点来构造一个坐标变换矩阵,进而推广到所有向量在这两个坐标系之间的变换关系。而本文提供了一种相对更容易求解、也比较直接的思路,并给出了相关的Python代码实现过程。
版权声明
本文首发链接为:https://www.cnblogs.com/dechinphy/p/xyz-transform.html
作者ID:DechinPhy
更多原著文章请参考:https://www.cnblogs.com/dechinphy/
打赏专用链接:https://www.cnblogs.com/dechinphy/gallery/image/379634.html
腾讯云专栏同步:https://cloud.tencent.com/developer/column/91958
CSDN同步链接:https://blog.csdn.net/baidu_37157624?spm=1008.2028.3001.5343
51CTO同步链接:https://blog.51cto.com/u_15561675
SETTLE约束算法中的坐标变换问题的更多相关文章
- 分子动力学模拟之SETTLE约束算法
技术背景 在上一篇文章中,我们讨论了在分子动力学里面使用LINCS约束算法及其在具备自动微分能力的Jax框架下的代码实现.约束算法,在分子动力学模拟的过程中时常会使用到,用于固定一些既定的成键关系.例 ...
- SETTLE约束算法的批量化处理
技术背景 在上一篇文章中,我们介绍了在分子动力学模拟中SETTLE约束算法的实现与应用,其中更多的是针对于单个的水分子.但由于相关代码是通过jax这一框架来实现的,因此对于多分子的体系,可以采用jax ...
- 差分约束算法————洛谷P4878 [USACO05DEC] 布局
题目: 不难看出题意主要是给出ml+md个格式为xi-xj<=ak的不等式,xi-xj为i,j俩头牛的距离,要我们求x1-xn的最大值. 经过上下加减我们可以将这几个不等式化成x1-xn< ...
- P5960 差分约束算法模板
差分约束 差分约束,一般用来解决有\(n\)个未知数,\(m\)个不等式方程的问题,形如: \[\begin{cases} \ x_{a_1}-x_{b_1}\leq y_1\\ \ x_{a_2}- ...
- KMP算法中next函数的理解
首先要感谢http://blog.csdn.net/v_july_v/article/details/7041827以及http://blog.chinaunix.net/uid-27164517-i ...
- 简明解释算法中的大O符号
伯乐在线导读:2009年1月28日Arec Barrwin在StackOverflow上提问,“有没有关于大O符号(Big O notation)的简单解释?尽量别用那么正式的定义,用尽可能简单的数学 ...
- 一步一步写算法(之prim算法 中)
原文:一步一步写算法(之prim算法 中) [ 声明:版权所有,欢迎转载,请勿用于商业用途. 联系信箱:feixiaoxing @163.com] C)编写最小生成树,涉及创建.挑选和添加过程 MI ...
- TextRank:关键词提取算法中的PageRank
很久以前,我用过TFIDF做过行业关键词提取.TFIDF仅仅从词的统计信息出发,而没有充分考虑词之间的语义信息.现在本文将介绍一种考虑了相邻词的语义关系.基于图排序的关键词提取算法TextRank [ ...
- 问题 1690: 算法4-7:KMP算法中的模式串移动数组
题目链接:https://www.dotcpp.com/oj/problem1690.html 题目描述 字符串的子串定位称为模式匹配,模式匹配可以有多种方法.简单的算法可以使用两重嵌套循环,时间复杂 ...
随机推荐
- .NET中测试代码运行时间
更新记录 本文迁移自Panda666原博客,原发布时间:2021年6月29日. 计算代码运行的时间,除了呆萌地用秒表去计时,或者可以通过Visual Studio来查看,还可以在.NET代码中使用St ...
- 浅析Kubernetes架构之workqueue
通用队列 在kubernetes中,使用go的channel无法满足kubernetes的应用场景,如延迟.限速等:在kubernetes中存在三种队列通用队列 common queue ,延迟队列 ...
- OpenCloudOS使用snap安装.NET 6
开源操作系统社区 OpenCloudOS 由腾讯与合作伙伴共同倡议发起,是完全中立.全面开放.安全稳定.高性能的操作系统及生态.OpenCloudOS 沉淀了多家厂商在软件和开源生态的优势,继承了腾讯 ...
- Redis系列2:数据持久化提高可用性
1 介绍 从上一篇的 <深刻理解高性能Redis的本质> 中可以知道, 我们经常在数据库层上加一层缓存(如Redis),来保证数据的访问效率. 这样性能确实也有了大幅度的提升,但是本身Re ...
- LeetCode. 812. 最大三角形面积
812. 最大三角形面积 鞋带公式 鞋带公式,用于计算任意多边形的面积,可用于计算三角形的面积 已知 ΔABC 三个顶点的坐标 A:(x1,y1). B:(x2,y2). C:(x3,y3) 对应的矩 ...
- SLF4J 日志门面
目录 01.简单介绍 02.日志级别 03.入门案例 03.动态打印 04.异常打印 05.日志集成 06.集成 logback 07.集成 slf4j-nop 08.集成 log4j 09.集成 j ...
- win10设置Python程序定时运行(设置计划任务)
今天来设置一下定时执行Pycharm内的脚本: 这个要基于win10 的任务计划程序(设置 > 控制面板 > 系统和安全 > 管理工具 > 任务计划程序) 1. create ...
- 【ArcGIS教程】专题图制作-人口密度分布图——人口密度分析
本篇以湖北省为例,制作人口密度分布图:这里所使用的为湖北省的省.市.县三个级别的行政区划矢量数据,以及居民点数据,进而进行密度分析. 示例数据来源于地理遥感生态网,网站地址www.gisrs.c ...
- 类似Tower的而故事还没结束
我对于SaaS一种有一种英雄主义的情怀在里面,无论是早期的推事本,还是后面我去调研的麦客CRM,国内的SaaS都在努力生长,在后疫情时代剩下的都是平台级的钉钉.飞书,或者垂直领域的王炸app了. 我早 ...
- 开发实践丨昇腾CANN的推理应用开发体验
摘要:这是关于一次 Ascend 在线实验的记录,主要内容是通过网络模型加载.推理.结果输出的部署全流程展示,从而快速熟悉并掌握 ACL(Ascend Computing Language)基本开发流 ...