调度 GMP
小结:
1、
当M从P的本地运行队列获取G时, 如果发现本地队列为空会尝试从其他P盗取一半的G过来,
这个机制叫做Work Stealing,
2、
Q M一定需要p吗?
A
不一定。M正在执行原生代码或者阻塞的syscall, 这时M并不拥有P。
3、
Q 怎么防止一个G消耗cpu时间过长 / 怎么防止其他G被饿死
A
一定的抢占 当一个goroutine占用cpu超过10ms,会被抢占,防止其他goroutine饿死。
4、
Q M有哪些状态? 什么是M的自旋状态?
A
M的状态
M并没有像G和P一样的状态标记, 但可以认为一个M有以下的状态:
- 自旋中(spinning): M正在从运行队列获取G, 这时候M会拥有一个P
- 执行go代码中: M正在执行go代码, 这时候M会拥有一个P
- 执行原生代码中: M正在执行原生代码或者阻塞的syscall, 这时M并不拥有P
- 休眠中: M发现无待运行的G时会进入休眠, 并添加到空闲M链表中, 这时M并不拥有P
自旋中(spinning)这个状态非常重要, 是否需要唤醒或者创建新的M取决于当前自旋中的M的数量.
深入golang runtime的调度 https://zboya.github.io/post/go_scheduler/
https://www.cnblogs.com/zkweb/p/7815600.html
Golang源码探索(二) 协程的实现原理
Golang最大的特色可以说是协程(goroutine)了, 协程让本来很复杂的异步编程变得简单, 让程序员不再需要面对回调地狱,
虽然现在引入了协程的语言越来越多, 但go中的协程仍然是实现的是最彻底的.
这篇文章将通过分析golang的源代码来讲解协程的实现原理.
这个系列分析的golang源代码是Google官方的实现的1.9.2版本, 不适用于其他版本和gccgo等其他实现,
运行环境是Ubuntu 16.04 LTS 64bit.
核心概念
要理解协程的实现, 首先需要了解go中的三个非常重要的概念, 它们分别是G, M和P,
没有看过golang源代码的可能会对它们感到陌生, 这三项是协程最主要的组成部分, 它们在golang的源代码中无处不在.
G (goroutine)
G是goroutine的头文字, goroutine可以解释为受管理的轻量线程, goroutine使用go关键词创建.
举例来说, func main() { go other() }, 这段代码创建了两个goroutine,
一个是main, 另一个是other, 注意main本身也是一个goroutine.
goroutine的新建, 休眠, 恢复, 停止都受到go运行时的管理.
goroutine执行异步操作时会进入休眠状态, 待操作完成后再恢复, 无需占用系统线程,
goroutine新建或恢复时会添加到运行队列, 等待M取出并运行.
M (machine)
M是machine的头文字, 在当前版本的golang中等同于系统线程.
M可以运行两种代码:
- go代码, 即goroutine, M运行go代码需要一个P
- 原生代码, 例如阻塞的syscall, M运行原生代码不需要P
M会从运行队列中取出G, 然后运行G, 如果G运行完毕或者进入休眠状态, 则从运行队列中取出下一个G运行, 周而复始.
有时候G需要调用一些无法避免阻塞的原生代码, 这时M会释放持有的P并进入阻塞状态, 其他M会取得这个P并继续运行队列中的G.
go需要保证有足够的M可以运行G, 不让CPU闲着, 也需要保证M的数量不能过多.
P (process)
P是process的头文字, 代表M运行G所需要的资源.
一些讲解协程的文章把P理解为cpu核心, 其实这是错误的.
虽然P的数量默认等于cpu核心数, 但可以通过环境变量GOMAXPROC修改, 在实际运行时P跟cpu核心并无任何关联.
P也可以理解为控制go代码的并行度的机制,
如果P的数量等于1, 代表当前最多只能有一个线程(M)执行go代码,
如果P的数量等于2, 代表当前最多只能有两个线程(M)执行go代码.
执行原生代码的线程数量不受P控制.
因为同一时间只有一个线程(M)可以拥有P, P中的数据都是锁自由(lock free)的, 读写这些数据的效率会非常的高.
数据结构
在讲解协程的工作流程之前, 还需要理解一些内部的数据结构.
G的状态
- 空闲中(_Gidle): 表示G刚刚新建, 仍未初始化
- 待运行(_Grunnable): 表示G在运行队列中, 等待M取出并运行
- 运行中(_Grunning): 表示M正在运行这个G, 这时候M会拥有一个P
- 系统调用中(_Gsyscall): 表示M正在运行这个G发起的系统调用, 这时候M并不拥有P
- 等待中(_Gwaiting): 表示G在等待某些条件完成, 这时候G不在运行也不在运行队列中(可能在channel的等待队列中)
- 已中止(_Gdead): 表示G未被使用, 可能已执行完毕(并在freelist中等待下次复用)
- 栈复制中(_Gcopystack): 表示G正在获取一个新的栈空间并把原来的内容复制过去(用于防止GC扫描)
M的状态
M并没有像G和P一样的状态标记, 但可以认为一个M有以下的状态:
- 自旋中(spinning): M正在从运行队列获取G, 这时候M会拥有一个P
- 执行go代码中: M正在执行go代码, 这时候M会拥有一个P
- 执行原生代码中: M正在执行原生代码或者阻塞的syscall, 这时M并不拥有P
- 休眠中: M发现无待运行的G时会进入休眠, 并添加到空闲M链表中, 这时M并不拥有P
自旋中(spinning)这个状态非常重要, 是否需要唤醒或者创建新的M取决于当前自旋中的M的数量.
P的状态
- 空闲中(_Pidle): 当M发现无待运行的G时会进入休眠, 这时M拥有的P会变为空闲并加到空闲P链表中
- 运行中(_Prunning): 当M拥有了一个P后, 这个P的状态就会变为运行中, M运行G会使用这个P中的资源
- 系统调用中(_Psyscall): 当go调用原生代码, 原生代码又反过来调用go代码时, 使用的P会变为此状态
- GC停止中(_Pgcstop): 当gc停止了整个世界(STW)时, P会变为此状态
- 已中止(_Pdead): 当P的数量在运行时改变, 且数量减少时多余的P会变为此状态
本地运行队列
在go中有多个运行队列可以保存待运行(_Grunnable)的G, 它们分别是各个P中的本地运行队列和全局运行队列.
入队待运行的G时会优先加到当前P的本地运行队列, M获取待运行的G时也会优先从拥有的P的本地运行队列获取,
本地运行队列入队和出队不需要使用线程锁.
本地运行队列有数量限制, 当数量达到256个时会入队到全局运行队列.
本地运行队列的数据结构是环形队列, 由一个256长度的数组和两个序号(head, tail)组成.
当M从P的本地运行队列获取G时, 如果发现本地队列为空会尝试从其他P盗取一半的G过来,
这个机制叫做Work Stealing, 详见后面的代码分析.
全局运行队列
全局运行队列保存在全局变量sched中, 全局运行队列入队和出队需要使用线程锁.
全局运行队列的数据结构是链表, 由两个指针(head, tail)组成.
空闲M链表
当M发现无待运行的G时会进入休眠, 并添加到空闲M链表中, 空闲M链表保存在全局变量sched.
进入休眠的M会等待一个信号量(m.park), 唤醒休眠的M会使用这个信号量.
go需要保证有足够的M可以运行G, 是通过这样的机制实现的:
- 入队待运行的G后, 如果当前无自旋的M但是有空闲的P, 就唤醒或者新建一个M
- 当M离开自旋状态并准备运行出队的G时, 如果当前无自旋的M但是有空闲的P, 就唤醒或者新建一个M
- 当M离开自旋状态并准备休眠时, 会在离开自旋状态后再次检查所有运行队列, 如果有待运行的G则重新进入自旋状态
因为"入队待运行的G"和"M离开自旋状态"会同时进行, go会使用这样的检查顺序:
入队待运行的G => 内存屏障 => 检查当前自旋的M数量 => 唤醒或者新建一个M
减少当前自旋的M数量 => 内存屏障 => 检查所有运行队列是否有待运行的G => 休眠
这样可以保证不会出现待运行的G入队了, 也有空闲的资源P, 但无M去执行的情况.
空闲P链表
当P的本地运行队列中的所有G都运行完毕, 又不能从其他地方拿到G时,
拥有P的M会释放P并进入休眠状态, 释放的P会变为空闲状态并加到空闲P链表中, 空闲P链表保存在全局变量sched
下次待运行的G入队时如果发现有空闲的P, 但是又没有自旋中的M时会唤醒或者新建一个M, M会拥有这个P, P会重新变为运行中的状态.
工作流程(概览)
下图是协程可能出现的工作状态, 图中有4个P, 其中M1~M3正在运行G并且运行后会从拥有的P的运行队列继续获取G:

只看这张图可能有点难以想象实际的工作流程, 这里我根据实际的代码再讲解一遍:
package main
import (
"fmt"
"time"
)
func printNumber(from, to int, c chan int) {
for x := from; x <= to; x++ {
fmt.Printf("%d\n", x)
time.Sleep(1 * time.Millisecond)
}
c <- 0
}
func main() {
c := make(chan int, 3)
go printNumber(1, 3, c)
go printNumber(4, 6, c)
_ = <- c
_ = <- c
}程序启动时会先创建一个G, 指向的是main(实际是runtime.main而不是main.main, 后面解释):
图中的虚线指的是G待运行或者开始运行的地址, 不是当前运行的地址.
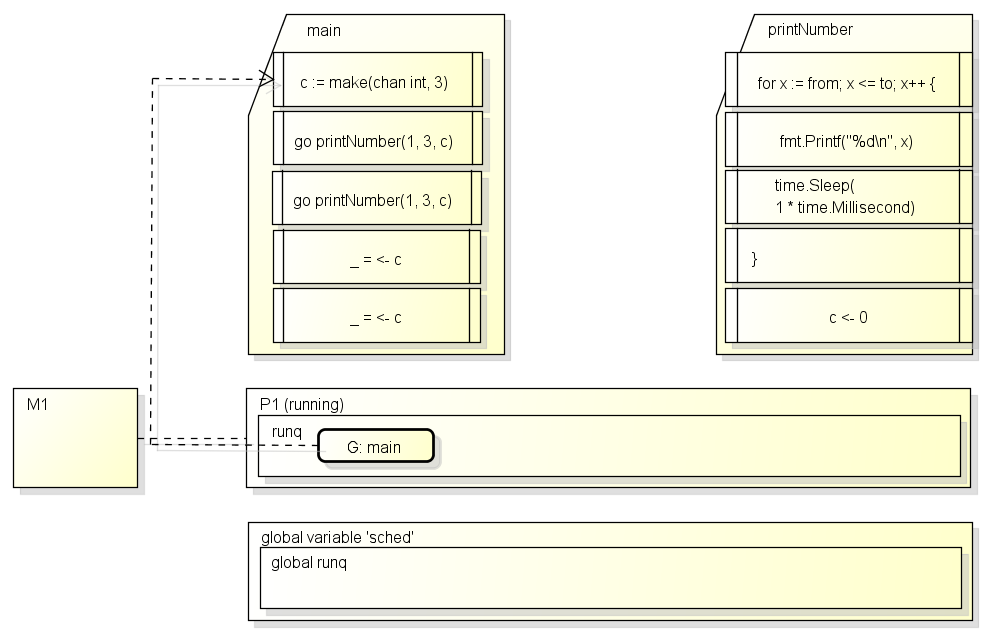
M会取得这个G并运行:

这时main会创建一个新的channel, 并启动两个新的G:

接下来G: main会从channel获取数据, 因为获取不到, G会保存状态并变为等待中(_Gwaiting)并添加到channel的队列:
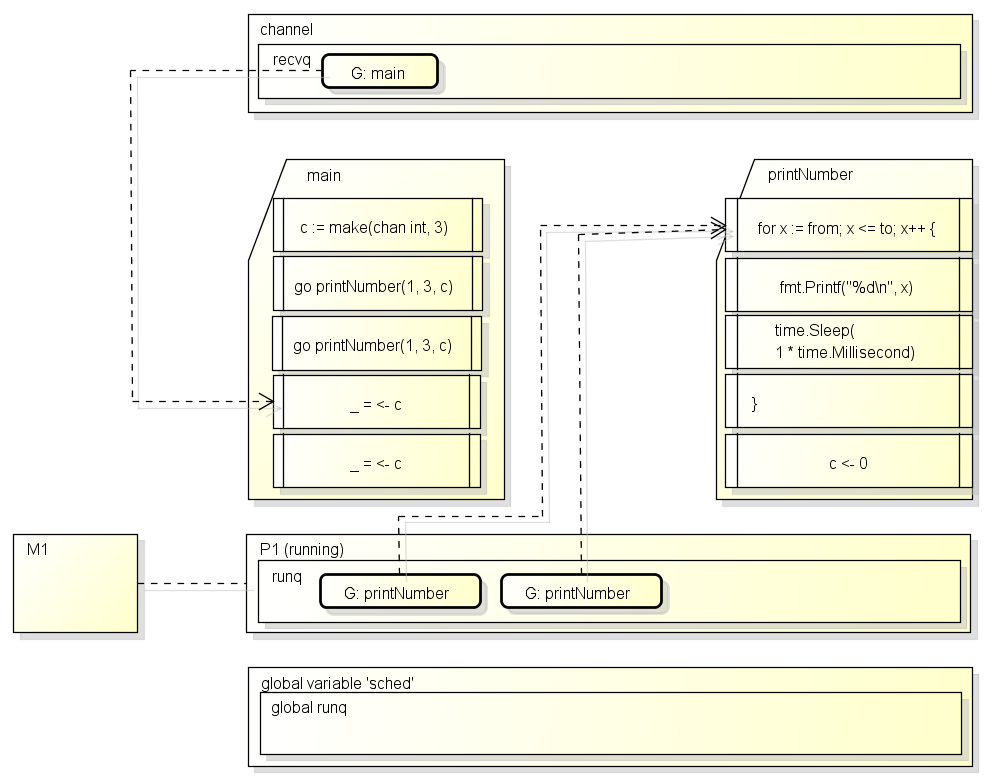
因为G: main保存了运行状态, 下次运行时将会从_ = <- c继续运行.
接下来M会从运行队列获取到G: printNumber并运行:

printNumber会打印数字, 完成后向channel写数据,
写数据时发现channel中有正在等待的G, 会把数据交给这个G, 把G变为待运行(_Grunnable)并重新放入运行队列:

接下来M会运行下一个G: printNumber, 因为创建channel时指定了大小为3的缓冲区, 可以直接把数据写入缓冲区而无需等待:

然后printNumber运行完毕, 运行队列中就只剩下G: main了:

最后M把G: main取出来运行, 会从上次中断的位置_ <- c继续运行:

第一个_ <- c的结果已经在前面设置过了, 这条语句会执行成功.
第二个_ <- c在获取时会发现channel中有已缓冲的0, 于是结果就是这个0, 不需要等待.
最后main执行完毕, 程序结束.
有人可能会好奇如果最后再加一个_ <- c会变成什么结果, 这时因为所有G都进入等待状态, go会检测出来并报告死锁:
fatal error: all goroutines are asleep - deadlock!开始代码分析
关于概念的讲解到此结束, 从这里开始会分析go中的实现代码, 我们需要先了解一些基础的内容.
汇编代码
从以下的go代码:
package main
import (
"fmt"
"time"
)
func printNumber(from, to int, c chan int) {
for x := from; x <= to; x++ {
fmt.Printf("%d\n", x)
time.Sleep(1 * time.Millisecond)
}
c <- 0
}
func main() {
c := make(chan int, 3)
go printNumber(1, 3, c)
go printNumber(4, 6, c)
_, _ = <- c, <- c
}可以生成以下的汇编代码(平台是linux x64, 使用的是默认选项, 即启用优化和内联):
(lldb) di -n main.main
hello`main.main:
hello[0x401190] <+0>: movq %fs:-0x8, %rcx
hello[0x401199] <+9>: cmpq 0x10(%rcx), %rsp
hello[0x40119d] <+13>: jbe 0x401291 ; <+257> at hello.go:16
hello[0x4011a3] <+19>: subq $0x40, %rsp
hello[0x4011a7] <+23>: leaq 0xb3632(%rip), %rbx ; runtime.rodata + 38880
hello[0x4011ae] <+30>: movq %rbx, (%rsp)
hello[0x4011b2] <+34>: movq $0x3, 0x8(%rsp)
hello[0x4011bb] <+43>: callq 0x4035a0 ; runtime.makechan at chan.go:49
hello[0x4011c0] <+48>: movq 0x10(%rsp), %rax
hello[0x4011c5] <+53>: movq $0x1, 0x10(%rsp)
hello[0x4011ce] <+62>: movq $0x3, 0x18(%rsp)
hello[0x4011d7] <+71>: movq %rax, 0x38(%rsp)
hello[0x4011dc] <+76>: movq %rax, 0x20(%rsp)
hello[0x4011e1] <+81>: movl $0x18, (%rsp)
hello[0x4011e8] <+88>: leaq 0x129c29(%rip), %rax ; main.printNumber.f
hello[0x4011ef] <+95>: movq %rax, 0x8(%rsp)
hello[0x4011f4] <+100>: callq 0x430cd0 ; runtime.newproc at proc.go:2657
hello[0x4011f9] <+105>: movq $0x4, 0x10(%rsp)
hello[0x401202] <+114>: movq $0x6, 0x18(%rsp)
hello[0x40120b] <+123>: movq 0x38(%rsp), %rbx
hello[0x401210] <+128>: movq %rbx, 0x20(%rsp)
hello[0x401215] <+133>: movl $0x18, (%rsp)
hello[0x40121c] <+140>: leaq 0x129bf5(%rip), %rax ; main.printNumber.f
hello[0x401223] <+147>: movq %rax, 0x8(%rsp)
hello[0x401228] <+152>: callq 0x430cd0 ; runtime.newproc at proc.go:2657
hello[0x40122d] <+157>: movq $0x0, 0x30(%rsp)
hello[0x401236] <+166>: leaq 0xb35a3(%rip), %rbx ; runtime.rodata + 38880
hello[0x40123d] <+173>: movq %rbx, (%rsp)
hello[0x401241] <+177>: movq 0x38(%rsp), %rbx
hello[0x401246] <+182>: movq %rbx, 0x8(%rsp)
hello[0x40124b] <+187>: leaq 0x30(%rsp), %rbx
hello[0x401250] <+192>: movq %rbx, 0x10(%rsp)
hello[0x401255] <+197>: callq 0x4043c0 ; runtime.chanrecv1 at chan.go:354
hello[0x40125a] <+202>: movq $0x0, 0x28(%rsp)
hello[0x401263] <+211>: leaq 0xb3576(%rip), %rbx ; runtime.rodata + 38880
hello[0x40126a] <+218>: movq %rbx, (%rsp)
hello[0x40126e] <+222>: movq 0x38(%rsp), %rbx
hello[0x401273] <+227>: movq %rbx, 0x8(%rsp)
hello[0x401278] <+232>: leaq 0x28(%rsp), %rbx
hello[0x40127d] <+237>: movq %rbx, 0x10(%rsp)
hello[0x401282] <+242>: callq 0x4043c0 ; runtime.chanrecv1 at chan.go:354
hello[0x401287] <+247>: movq 0x28(%rsp), %rbx
hello[0x40128c] <+252>: addq $0x40, %rsp
hello[0x401290] <+256>: retq
hello[0x401291] <+257>: callq 0x4538d0 ; runtime.morestack_noctxt at asm_amd64.s:365
hello[0x401296] <+262>: jmp 0x401190 ; <+0> at hello.go:16
hello[0x40129b] <+267>: int3
hello[0x40129c] <+268>: int3
hello[0x40129d] <+269>: int3
hello[0x40129e] <+270>: int3
hello[0x40129f] <+271>: int3
(lldb) di -n main.printNumber
hello`main.printNumber:
hello[0x401000] <+0>: movq %fs:-0x8, %rcx
hello[0x401009] <+9>: leaq -0x8(%rsp), %rax
hello[0x40100e] <+14>: cmpq 0x10(%rcx), %rax
hello[0x401012] <+18>: jbe 0x401185 ; <+389> at hello.go:8
hello[0x401018] <+24>: subq $0x88, %rsp
hello[0x40101f] <+31>: xorps %xmm0, %xmm0
hello[0x401022] <+34>: movups %xmm0, 0x60(%rsp)
hello[0x401027] <+39>: movq 0x90(%rsp), %rax
hello[0x40102f] <+47>: movq 0x98(%rsp), %rbp
hello[0x401037] <+55>: cmpq %rbp, %rax
hello[0x40103a] <+58>: jg 0x40112f ; <+303> at hello.go:13
hello[0x401040] <+64>: movq %rax, 0x40(%rsp)
hello[0x401045] <+69>: movq %rax, 0x48(%rsp)
hello[0x40104a] <+74>: xorl %ebx, %ebx
hello[0x40104c] <+76>: movq %rbx, 0x60(%rsp)
hello[0x401051] <+81>: movq %rbx, 0x68(%rsp)
hello[0x401056] <+86>: leaq 0x60(%rsp), %rbx
hello[0x40105b] <+91>: cmpq $0x0, %rbx
hello[0x40105f] <+95>: je 0x40117e ; <+382> at hello.go:10
hello[0x401065] <+101>: movq $0x1, 0x78(%rsp)
hello[0x40106e] <+110>: movq $0x1, 0x80(%rsp)
hello[0x40107a] <+122>: movq %rbx, 0x70(%rsp)
hello[0x40107f] <+127>: leaq 0xb73fa(%rip), %rbx ; runtime.rodata + 54400
hello[0x401086] <+134>: movq %rbx, (%rsp)
hello[0x40108a] <+138>: leaq 0x48(%rsp), %rbx
hello[0x40108f] <+143>: movq %rbx, 0x8(%rsp)
hello[0x401094] <+148>: movq $0x0, 0x10(%rsp)
hello[0x40109d] <+157>: callq 0x40bb90 ; runtime.convT2E at iface.go:128
hello[0x4010a2] <+162>: movq 0x18(%rsp), %rcx
hello[0x4010a7] <+167>: movq 0x20(%rsp), %rax
hello[0x4010ac] <+172>: movq 0x70(%rsp), %rbx
hello[0x4010b1] <+177>: movq %rcx, 0x50(%rsp)
hello[0x4010b6] <+182>: movq %rcx, (%rbx)
hello[0x4010b9] <+185>: movq %rax, 0x58(%rsp)
hello[0x4010be] <+190>: cmpb $0x0, 0x19ea1b(%rip) ; time.initdone.
hello[0x4010c5] <+197>: jne 0x401167 ; <+359> at hello.go:10
hello[0x4010cb] <+203>: movq %rax, 0x8(%rbx)
hello[0x4010cf] <+207>: leaq 0xfb152(%rip), %rbx ; go.string.* + 560
hello[0x4010d6] <+214>: movq %rbx, (%rsp)
hello[0x4010da] <+218>: movq $0x3, 0x8(%rsp)
hello[0x4010e3] <+227>: movq 0x70(%rsp), %rbx
hello[0x4010e8] <+232>: movq %rbx, 0x10(%rsp)
hello[0x4010ed] <+237>: movq 0x78(%rsp), %rbx
hello[0x4010f2] <+242>: movq %rbx, 0x18(%rsp)
hello[0x4010f7] <+247>: movq 0x80(%rsp), %rbx
hello[0x4010ff] <+255>: movq %rbx, 0x20(%rsp)
hello[0x401104] <+260>: callq 0x45ad70 ; fmt.Printf at print.go:196
hello[0x401109] <+265>: movq $0xf4240, (%rsp) ; imm = 0xF4240
hello[0x401111] <+273>: callq 0x442a50 ; time.Sleep at time.go:48
hello[0x401116] <+278>: movq 0x40(%rsp), %rax
hello[0x40111b] <+283>: incq %rax
hello[0x40111e] <+286>: movq 0x98(%rsp), %rbp
hello[0x401126] <+294>: cmpq %rbp, %rax
hello[0x401129] <+297>: jle 0x401040 ; <+64> at hello.go:10
hello[0x40112f] <+303>: movq $0x0, 0x48(%rsp)
hello[0x401138] <+312>: leaq 0xb36a1(%rip), %rbx ; runtime.rodata + 38880
hello[0x40113f] <+319>: movq %rbx, (%rsp)
hello[0x401143] <+323>: movq 0xa0(%rsp), %rbx
hello[0x40114b] <+331>: movq %rbx, 0x8(%rsp)
hello[0x401150] <+336>: leaq 0x48(%rsp), %rbx
hello[0x401155] <+341>: movq %rbx, 0x10(%rsp)
hello[0x40115a] <+346>: callq 0x403870 ; runtime.chansend1 at chan.go:99
hello[0x40115f] <+351>: addq $0x88, %rsp
hello[0x401166] <+358>: retq
hello[0x401167] <+359>: leaq 0x8(%rbx), %r8
hello[0x40116b] <+363>: movq %r8, (%rsp)
hello[0x40116f] <+367>: movq %rax, 0x8(%rsp)
hello[0x401174] <+372>: callq 0x40f090 ; runtime.writebarrierptr at mbarrier.go:129
hello[0x401179] <+377>: jmp 0x4010cf ; <+207> at hello.go:10
hello[0x40117e] <+382>: movl %eax, (%rbx)
hello[0x401180] <+384>: jmp 0x401065 ; <+101> at hello.go:10
hello[0x401185] <+389>: callq 0x4538d0 ; runtime.morestack_noctxt at asm_amd64.s:365
hello[0x40118a] <+394>: jmp 0x401000 ; <+0> at hello.go:8
hello[0x40118f] <+399>: int3 这些汇编代码现在看不懂也没关系, 下面会从这里取出一部分来解释.
调用规范
不同平台对于函数有不同的调用规范.
例如32位通过栈传递参数, 通过eax寄存器传递返回值.
64位windows通过rcx, rdx, r8, r9传递前4个参数, 通过栈传递第5个开始的参数, 通过eax寄存器传递返回值.
64位linux, unix通过rdi, rsi, rdx, rcx, r8, r9传递前6个参数, 通过栈传递第7个开始的参数, 通过eax寄存器传递返回值.
go并不使用这些调用规范(除非涉及到与原生代码交互), go有一套独自的调用规范.
go的调用规范非常的简单, 所有参数都通过栈传递, 返回值也通过栈传递,
例如这样的函数:
type MyStruct struct { X int; P *int }
func someFunc(x int, s MyStruct) (int, MyStruct) { ... }调用函数时的栈的内容如下:

可以看得出参数和返回值都从低位到高位排列, go函数可以有多个返回值的原因也在于此. 因为返回值都通过栈传递了.
需要注意的这里的"返回地址"是x86和x64上的, arm的返回地址会通过LR寄存器保存, 内容会和这里的稍微不一样.
另外注意的是和c不一样, 传递构造体时整个构造体的内容都会复制到栈上, 如果构造体很大将会影响性能.
TLS
TLS的全称是Thread-local storage, 代表每个线程的中的本地数据.
例如标准c中的errno就是一个典型的TLS变量, 每个线程都有一个独自的errno, 写入它不会干扰到其他线程中的值.
go在实现协程时非常依赖TLS机制, 会用于获取系统线程中当前的G和G所属的M的实例.
因为go并不使用glibc, 操作TLS会使用系统原生的接口, 以linux x64为例,
go在新建M时会调用arch_prctl这个syscall设置FS寄存器的值为M.tls的地址,
运行中每个M的FS寄存器都会指向它们对应的M实例的tls, linux内核调度线程时FS寄存器会跟着线程一起切换,
这样go代码只需要访问FS寄存器就可以存取线程本地的数据.
上面的汇编代码中的
hello[0x401000] <+0>: movq %fs:-0x8, %rcx会把指向当前的G的指针从TLS移动到rcx寄存器中.
栈扩张
因为go中的协程是stackful coroutine, 每一个goroutine都需要有自己的栈空间,
栈空间的内容在goroutine休眠时需要保留, 待休眠完成后恢复(这时整个调用树都是完整的).
这样就引出了一个问题, goroutine可能会同时存在很多个, 如果每一个goroutine都预先分配一个足够的栈空间那么go就会使用过多的内存.
为了避免这个问题, go在一开始只为goroutine分配一个很小的栈空间, 它的大小在当前版本是2K.
当函数发现栈空间不足时, 会申请一块新的栈空间并把原来的栈内容复制过去.
上面的汇编代码中的
hello[0x401000] <+0>: movq %fs:-0x8, %rcx
hello[0x401009] <+9>: leaq -0x8(%rsp), %rax
hello[0x40100e] <+14>: cmpq 0x10(%rcx), %rax
hello[0x401012] <+18>: jbe 0x401185 ; <+389> at hello.go:8会检查比较rsp减去一定值以后是否比g.stackguard0小, 如果小于等于则需要调到下面调用morestack_noctxt函数.
细心的可能会发现比较的值跟实际减去的值不一致, 这是因为stackguard0下面会预留一小部分空间, 编译时确定不超过预留的空间可以省略比对.
写屏障(Write Barrier)
因为go支持并行GC, GC的扫描和go代码可以同时运行, 这样带来的问题是GC扫描的过程中go代码有可能改变了对象的依赖树,
例如开始扫描时发现根对象A和B, B拥有C的指针, GC先扫描A, 然后B把C的指针交给A, GC再扫描B, 这时C就不会被扫描到.
为了避免这个问题, go在GC的标记阶段会启用写屏障(Write Barrier).
启用了写屏障(Write Barrier)后, 当B把C的指针交给A时, GC会认为在这一轮的扫描中C的指针是存活的,
即使A可能会在稍后丢掉C, 那么C就在下一轮回收.
写屏障只针对指针启用, 而且只在GC的标记阶段启用, 平时会直接把值写入到目标地址:
关于写屏障的详细将在下一篇(GC篇)分析.
值得一提的是CoreCLR的GC也有写屏障的机制, 但作用跟这里的不一样(用于标记跨代引用).
闭包(Closure)
闭包这个概念本身应该不需要解释, 我们实际看一看go是如何实现闭包的:
package main
import (
"fmt"
)
func executeFn(fn func() int) int {
return fn();
}
func main() {
a := 1
b := 2
c := executeFn(func() int {
a += b
return a
})
fmt.Printf("%d %d %d\n", a, b, c)
}这段代码的输出结果是3 2 3, 熟悉go的应该不会感到意外.
main函数执行executeFn函数的汇编代码如下:
hello[0x4a096f] <+47>: movq $0x1, 0x40(%rsp) ; 变量a等于1
hello[0x4a0978] <+56>: leaq 0x151(%rip), %rax ; 寄存器rax等于匿名函数main.main.func1的地址
hello[0x4a097f] <+63>: movq %rax, 0x60(%rsp) ; 变量rsp+0x60等于匿名函数的地址
hello[0x4a0984] <+68>: leaq 0x40(%rsp), %rax ; 寄存器rax等于变量a的地址
hello[0x4a0989] <+73>: movq %rax, 0x68(%rsp) ; 变量rsp+0x68等于变量a的地址
hello[0x4a098e] <+78>: movq $0x2, 0x70(%rsp) ; 变量rsp+0x70等于2(变量b的值)
hello[0x4a0997] <+87>: leaq 0x60(%rsp), %rax ; 寄存器rax等于地址rsp+0x60
hello[0x4a099c] <+92>: movq %rax, (%rsp) ; 第一个参数等于地址rsp+0x60
hello[0x4a09a0] <+96>: callq 0x4a08f0 ; 执行main.executeFn
hello[0x4a09a5] <+101>: movq 0x8(%rsp), %rax ; 寄存器rax等于返回值我们可以看到传给executeFn的是一个指针, 指针指向的内容是[匿名函数的地址, 变量a的地址, 变量b的值].
变量a传地址的原因是匿名函数中对a进行了修改, 需要反映到原来的a上.
executeFn函数执行闭包的汇编代码如下:
hello[0x4a08ff] <+15>: subq $0x10, %rsp ; 在栈上分配0x10的空间
hello[0x4a0903] <+19>: movq %rbp, 0x8(%rsp) ; 把原来的寄存器rbp移到变量rsp+0x8
hello[0x4a0908] <+24>: leaq 0x8(%rsp), %rbp ; 把变量rsp+0x8的地址移到寄存器rbp
hello[0x4a090d] <+29>: movq 0x18(%rsp), %rdx ; 把第一个参数(闭包)的指针移到寄存器rdx
hello[0x4a0912] <+34>: movq (%rdx), %rax ; 把闭包中函数的指针移到寄存器rax
hello[0x4a0915] <+37>: callq *%rax ; 调用闭包中的函数
hello[0x4a0917] <+39>: movq (%rsp), %rax ; 把返回值移到寄存器rax
hello[0x4a091b] <+43>: movq %rax, 0x20(%rsp) ; 把寄存器rax移到返回值中(参数后面)
hello[0x4a0920] <+48>: movq 0x8(%rsp), %rbp ; 把变量rsp+0x8的值恢复寄存器rbp(恢复原rbp)
hello[0x4a0925] <+53>: addq $0x10, %rsp ; 释放栈空间
hello[0x4a0929] <+57>: retq ; 从函数返回可以看到调用闭包时参数并不通过栈传递, 而是通过寄存器rdx传递, 闭包的汇编代码如下:
hello[0x455660] <+0>: movq 0x8(%rdx), %rax ; 第一个参数移到寄存器rax(变量a的指针)
hello[0x455664] <+4>: movq (%rax), %rcx ; 把寄存器rax指向的值移到寄存器rcx(变量a的值)
hello[0x455667] <+7>: addq 0x10(%rdx), %rcx ; 添加第二个参数到寄存器rcx(变量a的值+变量b的值)
hello[0x45566b] <+11>: movq %rcx, (%rax) ; 把寄存器rcx移到寄存器rax指向的值(相加的结果保存回变量a)
hello[0x45566e] <+14>: movq %rcx, 0x8(%rsp) ; 把寄存器rcx移到返回结果
hello[0x455673] <+19>: retq ; 从函数返回闭包的传递可以总结如下:
- 闭包的内容是[匿名函数的地址, 传给匿名函数的参数(不定长)...]
- 传递闭包给其他函数时会传递指向"闭包的内容"的指针
- 调用闭包时会把指向"闭包的内容"的指针放到寄存器rdx(在go内部这个指针称为"上下文")
- 闭包会从寄存器rdx取出参数
- 如果闭包修改了变量, 闭包中的参数会是指针而不是值, 修改时会修改到原来的位置上
闭包+goroutine
细心的可能会发现在上面的例子中, 闭包的内容在栈上, 如果不是直接调用executeFn而是go executeFn呢?
把上面的代码改为go executeFn(func() ...)可以生成以下的汇编代码:
hello[0x455611] <+33>: leaq 0xb4a8(%rip), %rax ; 寄存器rax等于类型信息
hello[0x455618] <+40>: movq %rax, (%rsp) ; 第一个参数等于类型信息
hello[0x45561c] <+44>: callq 0x40d910 ; 调用runtime.newobject
hello[0x455621] <+49>: movq 0x8(%rsp), %rax ; 寄存器rax等于返回值(这里称为新对象a)
hello[0x455626] <+54>: movq %rax, 0x28(%rsp) ; 变量rsp+0x28等于新对象a
hello[0x45562b] <+59>: movq $0x1, (%rax) ; 新对象a的值等于1
hello[0x455632] <+66>: leaq 0x136e7(%rip), %rcx ; 寄存器rcx等于类型信息
hello[0x455639] <+73>: movq %rcx, (%rsp) ; 第一个参数等于类型信息
hello[0x45563d] <+77>: callq 0x40d910 ; 调用runtime.newobject
hello[0x455642] <+82>: movq 0x8(%rsp), %rax ; 寄存器rax等于返回值(这里称为新对象fn)
hello[0x455647] <+87>: leaq 0x82(%rip), %rcx ; 寄存器rcx等于匿名函数main.main.func1的地址
hello[0x45564e] <+94>: movq %rcx, (%rax) ; 新对象fn+0的值等于main.main.func1的地址
hello[0x455651] <+97>: testb (%rax), %al ; 确保新对象fn不等于nil
hello[0x455653] <+99>: movl 0x78397(%rip), %ecx ; 寄存器ecx等于当前是否启用写屏障
hello[0x455659] <+105>: leaq 0x8(%rax), %rdx ; 寄存器rdx等于新对象fn+0x8的地址
hello[0x45565d] <+109>: testl %ecx, %ecx ; 判断当前是否启用写屏障
hello[0x45565f] <+111>: jne 0x455699 ; 启用写屏障时调用后面的逻辑
hello[0x455661] <+113>: movq 0x28(%rsp), %rcx ; 寄存器rcx等于新对象a
hello[0x455666] <+118>: movq %rcx, 0x8(%rax) ; 设置新对象fn+0x8的值等于新对象a
hello[0x45566a] <+122>: movq $0x2, 0x10(%rax) ; 设置新对象fn+0x10的值等于2(变量b的值)
hello[0x455672] <+130>: movq %rax, 0x10(%rsp) ; 第三个参数等于新对象fn(额外参数)
hello[0x455677] <+135>: movl $0x10, (%rsp) ; 第一个参数等于0x10(函数+参数的大小)
hello[0x45567e] <+142>: leaq 0x22fb3(%rip), %rax ; 第二个参数等于一个常量构造体的地址
hello[0x455685] <+149>: movq %rax, 0x8(%rsp) ; 这个构造体的类型是funcval, 值是executeFn的地址
hello[0x45568a] <+154>: callq 0x42e690 ; 调用runtime.newproc创建新的goroutine我们可以看到goroutine+闭包的情况更复杂, 首先go会通过逃逸分析算出变量a和闭包会逃逸到外面,
这时go会在heap上分配变量a和闭包, 上面调用的两次newobject就是分别对变量a和闭包的分配.
在创建goroutine时, 首先会传入函数+参数的大小(上面是8+8=16), 然后传入函数+参数, 上面的参数即闭包的地址.
m0和g0
go中还有特殊的M和G, 它们是m0和g0.
m0是启动程序后的主线程, 这个m对应的实例会在全局变量m0中, 不需要在heap上分配,
m0负责执行初始化操作和启动第一个g, 在之后m0就和其他的m一样了.
g0是仅用于负责调度的G, g0不指向任何可执行的函数, 每个m都会有一个自己的g0,
在调度或系统调用时会使用g0的栈空间, 全局变量的g0是m0的g0.
如果上面的内容都了解, 就可以开始看golang的源代码了.
程序初始化
go程序的入口点是runtime.rt0_go, 流程是:
- 分配栈空间, 需要2个本地变量+2个函数参数, 然后向8对齐
- 把传入的argc和argv保存到栈上
- 更新g0中的stackguard的值, stackguard用于检测栈空间是否不足, 需要分配新的栈空间
- 获取当前cpu的信息并保存到各个全局变量
- 调用_cgo_init如果函数存在
- 初始化当前线程的TLS, 设置FS寄存器为m0.tls+8(获取时会-8)
- 测试TLS是否工作
- 设置g0到TLS中, 表示当前的g是g0
- 设置m0.g0 = g0
- 设置g0.m = m0
- 调用runtime.check做一些检查
- 调用runtime.args保存传入的argc和argv到全局变量
- 调用runtime.osinit根据系统执行不同的初始化
- 这里(linux x64)设置了全局变量ncpu等于cpu核心数量
- 调用runtime.schedinit执行共同的初始化
- 这里的处理比较多, 会初始化栈空间分配器, GC, 按cpu核心数量或GOMAXPROCS的值生成P等
- 生成P的处理在procresize中
- 调用runtime.newproc创建一个新的goroutine, 指向的是
runtime.main- runtime.newproc这个函数在创建普通的goroutine时也会使用, 在下面的"go的实现"中会详细讲解
- 调用runtime·mstart启动m0
- 启动后m0会不断从运行队列获取G并运行, runtime.mstart调用后不会返回
- runtime.mstart这个函数是m的入口点(不仅仅是m0), 在下面的"调度器的实现"中会详细讲解
第一个被调度的G会运行runtime.main, 流程是:
- 标记主函数已调用, 设置mainStarted = true
- 启动一个新的M执行sysmon函数, 这个函数会监控全局的状态并对运行时间过长的G进行抢占
- 要求G必须在当前M(系统主线程)上执行
- 调用runtime_init函数
- 调用gcenable函数
- 调用main.init函数, 如果函数存在
- 不再要求G必须在当前M上运行
- 如果程序是作为c的类库编译的, 在这里返回
- 调用main.main函数
- 如果当前发生了panic, 则等待panic处理
- 调用exit(0)退出程序
G M P的定义
G里面比较重要的成员如下
- stack: 当前g使用的栈空间, 有lo和hi两个成员
- stackguard0: 检查栈空间是否足够的值, 低于这个值会扩张栈, 0是go代码使用的
- stackguard1: 检查栈空间是否足够的值, 低于这个值会扩张栈, 1是原生代码使用的
- m: 当前g对应的m
- sched: g的调度数据, 当g中断时会保存当前的pc和rsp等值到这里, 恢复运行时会使用这里的值
- atomicstatus: g的当前状态
- schedlink: 下一个g, 当g在链表结构中会使用
- preempt: g是否被抢占中
- lockedm: g是否要求要回到这个M执行, 有的时候g中断了恢复会要求使用原来的M执行
M里面比较重要的成员如下
- g0: 用于调度的特殊g, 调度和执行系统调用时会切换到这个g
- curg: 当前运行的g
- p: 当前拥有的P
- nextp: 唤醒M时, M会拥有这个P
- park: M休眠时使用的信号量, 唤醒M时会通过它唤醒
- schedlink: 下一个m, 当m在链表结构中会使用
- mcache: 分配内存时使用的本地分配器, 和p.mcache一样(拥有P时会复制过来)
- lockedg: lockedm的对应值
P里面比较重要的成员如下
- status: p的当前状态
- link: 下一个p, 当p在链表结构中会使用
- m: 拥有这个P的M
- mcache: 分配内存时使用的本地分配器
- runqhead: 本地运行队列的出队序号
- runqtail: 本地运行队列的入队序号
- runq: 本地运行队列的数组, 可以保存256个G
- gfree: G的自由列表, 保存变为_Gdead后可以复用的G实例
- gcBgMarkWorker: 后台GC的worker函数, 如果它存在M会优先执行它
- gcw: GC的本地工作队列, 详细将在下一篇(GC篇)分析
go的实现
使用go命令创建goroutine时, go会把go命令编译为对runtime.newproc的调用, 堆栈的结构如下:

第一个参数是funcval + 额外参数的长度, 第二个参数是funcval, 后面的都是传递给goroutine中执行的函数的额外参数.
funcval的定义在这里, fn是指向函数机器代码的指针.
runtime.newproc的处理如下:
- 计算额外参数的地址argp
- 获取调用端的地址(返回地址)pc
- 使用systemstack调用newproc1
systemstack会切换当前的g到g0, 并且使用g0的栈空间, 然后调用传入的函数, 再切换回原来的g和原来的栈空间.
切换到g0后会假装返回地址是mstart, 这样traceback的时候可以在mstart停止.
这里传给systemstack的是一个闭包, 调用时会把闭包的地址放到寄存器rdx, 具体可以参考上面对闭包的分析.
runtime.newproc1的处理如下:
- 调用getg获取当前的g, 会编译为读取FS寄存器(TLS), 这里会获取到g0
- 设置g对应的m的locks++, 禁止抢占
- 获取m拥有的p
- 新建一个g
- 把参数复制到g的栈上
- 把返回地址复制到g的栈上, 这里的返回地址是goexit, 表示调用完目标函数后会调用goexit
- 设置g的调度数据(sched)
- 设置sched.sp等于参数+返回地址后的rsp地址
- 设置sched.pc等于目标函数的地址, 查看gostartcallfn和gostartcall
- 设置sched.g等于g
- 设置g的状态为待运行(_Grunnable)
- 调用runqput把g放到运行队列
- 首先随机把g放到p.runnext, 如果放到runnext则入队原来在runnext的g
- 然后尝试把g放到P的"本地运行队列"
- 如果本地运行队列满了则调用runqputslow把g放到"全局运行队列"
- runqputslow会把本地运行队列中一半的g放到全局运行队列, 这样下次就可以继续用快速的本地运行队列了
- 如果当前有空闲的P, 但是无自旋的M(nmspinning等于0), 并且主函数已执行则唤醒或新建一个M
- 这一步非常重要, 用于保证当前有足够的M运行G, 具体请查看上面的"空闲M链表"
- 唤醒或新建一个M会通过wakep函数
创建goroutine的流程就这么多了, 接下来看看M是如何调度的.
调度器的实现
M启动时会调用mstart函数, m0在初始化后调用, 其他的的m在线程启动后调用.
mstart函数的处理如下:
- 调用getg获取当前的g, 这里会获取到g0
- 如果g未分配栈则从当前的栈空间(系统栈空间)上分配, 也就是说g0会使用系统栈空间
- 调用mstart1函数
调用schedule函数后就进入了调度循环, 整个流程可以简单总结为:
schedule函数获取g => [必要时休眠] => [唤醒后继续获取] => execute函数执行g => 执行后返回到goexit => 重新执行schedule函数schedule函数的处理如下:
- 如果当前GC需要停止整个世界(STW), 则调用stopm休眠当前的M
- 如果M拥有的P中指定了需要在安全点运行的函数(P.runSafePointFn), 则运行它
- 快速获取待运行的G, 以下处理如果有一个获取成功后面就不会继续获取
- 如果当前GC正在标记阶段, 则查找有没有待运行的GC Worker, GC Worker也是一个G
- 为了公平起见, 每61次调度从全局运行队列获取一次G, (一直从本地获取可能导致全局运行队列中的G不被运行)
- 从P的本地运行队列中获取G, 调用runqget函数
- 快速获取失败时, 调用findrunnable函数获取待运行的G, 会阻塞到获取成功为止
- 如果当前GC需要停止整个世界(STW), 则调用stopm休眠当前的M
- 如果M拥有的P中指定了需要在安全点运行的函数(P.runSafePointFn), 则运行它
- 如果有析构器待运行则使用"运行析构器的G"
- 从P的本地运行队列中获取G, 调用runqget函数
- 从全局运行队列获取G, 调用globrunqget函数, 需要上锁
- 从网络事件反应器获取G, 函数netpoll会获取哪些fd可读可写或已关闭, 然后返回等待fd相关事件的G
- 如果获取不到G, 则执行Work Stealing
- 调用runqsteal尝试从其他P的本地运行队列盗取一半的G
- 如果还是获取不到G, 就需要休眠M了, 接下来是休眠的步骤
- 再次检查当前GC是否在标记阶段, 在则查找有没有待运行的GC Worker, GC Worker也是一个G
- 再次检查如果当前GC需要停止整个世界, 或者P指定了需要再安全点运行的函数, 则跳到findrunnable的顶部重试
- 再次检查全局运行队列中是否有G, 有则获取并返回
- 释放M拥有的P, P会变为空闲(_Pidle)状态
- 把P添加到"空闲P链表"中
- 让M离开自旋状态, 这里的处理非常重要, 参考上面的"空闲M链表"
- 首先减少表示当前自旋中的M的数量的全局变量nmspinning
- 再次检查所有P的本地运行队列, 如果不为空则让M重新进入自旋状态, 并跳到findrunnable的顶部重试
- 再次检查有没有待运行的GC Worker, 有则让M重新进入自旋状态, 并跳到findrunnable的顶部重试
- 再次检查网络事件反应器是否有待运行的G, 这里对netpoll的调用会阻塞, 直到某个fd收到了事件
- 如果最终还是获取不到G, 调用stopm休眠当前的M
- 唤醒后跳到findrunnable的顶部重试
- 成功获取到一个待运行的G
- 让M离开自旋状态, 调用resetspinning, 这里的处理和上面的不一样
- 如果当前有空闲的P, 但是无自旋的M(nmspinning等于0), 则唤醒或新建一个M
- 上面离开自旋状态是为了休眠M, 所以会再次检查所有队列然后休眠
- 这里离开自选状态是为了执行G, 所以会检查是否有空闲的P, 有则表示可以再开新的M执行G
- 如果G要求回到指定的M(例如上面的runtime.main)
- 调用startlockedm函数把G和P交给该M, 自己进入休眠
- 从休眠唤醒后跳到schedule的顶部重试
- 调用execute函数执行G
execute函数的处理如下:
- 调用getg获取当前的g
- 把G的状态由待运行(_Grunnable)改为运行中(_Grunning)
- 设置G的stackguard, 栈空间不足时可以扩张
- 增加P中记录的调度次数(对应上面的每61次优先获取一次全局运行队列)
- 设置g.m.curg = g
- 设置g.m = m
- 调用gogo函数
- 这个函数会根据g.sched中保存的状态恢复各个寄存器的值并继续运行g
- 首先针对g.sched.ctxt调用写屏障(GC标记指针存活), ctxt中一般会保存指向[函数+参数]的指针
- 设置TLS中的g为g.sched.g, 也就是g自身
- 设置rsp寄存器为g.sched.rsp
- 设置rax寄存器为g.sched.ret
- 设置rdx寄存器为g.sched.ctxt (上下文)
- 设置rbp寄存器为g.sched.rbp
- 清空sched中保存的信息
- 跳转到g.sched.pc
- 因为前面创建goroutine的newproc1函数把返回地址设为了goexit, 函数运行完毕返回时将会调用goexit函数
g.sched.pc在G首次运行时会指向目标函数的第一条机器指令,
如果G被抢占或者等待资源而进入休眠, 在休眠前会保存状态到g.sched,
g.sched.pc会变为唤醒后需要继续执行的地址, "保存状态"的实现将在下面讲解.
目标函数执行完毕后会调用goexit函数, goexit函数会调用goexit1函数, goexit1函数会通过mcall调用goexit0函数.
mcall这个函数就是用于实现"保存状态"的, 处理如下:
- 设置g.sched.pc等于当前的返回地址
- 设置g.sched.sp等于寄存器rsp的值
- 设置g.sched.g等于当前的g
- 设置g.sched.bp等于寄存器rbp的值
- 切换TLS中当前的g等于m.g0
- 设置寄存器rsp等于g0.sched.sp, 使用g0的栈空间
- 设置第一个参数为原来的g
- 设置rdx寄存器为指向函数地址的指针(上下文)
- 调用指定的函数, 不会返回
mcall这个函数保存当前的运行状态到g.sched, 然后切换到g0和g0的栈空间, 再调用指定的函数.
回到g0的栈空间这个步骤非常重要, 因为这个时候g已经中断, 继续使用g的栈空间且其他M唤醒了这个g将会产生灾难性的后果.
G在中断或者结束后都会通过mcall回到g0的栈空间继续调度, 从goexit调用的mcall的保存状态其实是多余的, 因为G已经结束了.
goexit1函数会通过mcall调用goexit0函数, goexit0函数调用时已经回到了g0的栈空间, 处理如下:
- 把G的状态由运行中(_Grunning)改为已中止(_Gdead)
- 清空G的成员
- 调用dropg函数解除M和G之间的关联
- 调用gfput函数把G放到P的自由列表中, 下次创建G时可以复用
- 调用schedule函数继续调度
G结束后回到schedule函数, 这样就结束了一个调度循环.
不仅只有G结束会重新开始调度, G被抢占或者等待资源也会重新进行调度, 下面继续来看这两种情况.
抢占的实现
上面我提到了runtime.main会创建一个额外的M运行sysmon函数, 抢占就是在sysmon中实现的.
sysmon会进入一个无限循环, 第一轮回休眠20us, 之后每次休眠时间倍增, 最终每一轮都会休眠10ms.
sysmon中有netpool(获取fd事件), retake(抢占), forcegc(按时间强制执行gc), scavenge heap(释放自由列表中多余的项减少内存占用)等处理.
retake函数负责处理抢占, 流程是:
- 枚举所有的P
- 如果P在系统调用中(_Psyscall), 且经过了一次sysmon循环(20us~10ms), 则抢占这个P
- 调用handoffp解除M和P之间的关联
- 如果P在运行中(_Prunning), 且经过了一次sysmon循环并且G运行时间超过forcePreemptNS(10ms), 则抢占这个P
- 调用preemptone函数
- 设置g.preempt = true
- 设置g.stackguard0 = stackPreempt
- 调用preemptone函数
- 如果P在系统调用中(_Psyscall), 且经过了一次sysmon循环(20us~10ms), 则抢占这个P
为什么设置了stackguard就可以实现抢占?
因为这个值用于检查当前栈空间是否足够, go函数的开头会比对这个值判断是否需要扩张栈.
stackPreempt是一个特殊的常量, 它的值会比任何的栈地址都要大, 检查时一定会触发栈扩张.
栈扩张调用的是morestack_noctxt函数, morestack_noctxt函数清空rdx寄存器并调用morestack函数.
morestack函数会保存G的状态到g.sched, 切换到g0和g0的栈空间, 然后调用newstack函数.
newstack函数判断g.stackguard0等于stackPreempt, 就知道这是抢占触发的, 这时会再检查一遍是否要抢占:
- 如果M被锁定(函数的本地变量中有P), 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M正在分配内存, 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M设置了当前不能抢占, 则跳过这一次的抢占并调用gogo函数继续运行G
- 如果M的状态不是运行中, 则跳过这一次的抢占并调用gogo函数继续运行G
即使这一次抢占失败, 因为g.preempt等于true, runtime中的一些代码会重新设置stackPreempt以重试下一次的抢占.
如果判断可以抢占, 则继续判断是否GC引起的, 如果是则对G的栈空间执行标记处理(扫描根对象)然后继续运行,
如果不是GC引起的则调用gopreempt_m函数完成抢占.
gopreempt_m函数会调用goschedImpl函数, goschedImpl函数的流程是:
- 把G的状态由运行中(_Grunnable)改为待运行(_Grunnable)
- 调用dropg函数解除M和G之间的关联
- 调用globrunqput把G放到全局运行队列
- 调用schedule函数继续调度
因为全局运行队列的优先度比较低, 各个M会经过一段时间再去重新获取这个G执行,
抢占机制保证了不会有一个G长时间的运行导致其他G无法运行的情况发生.
channel的实现
在goroutine运行的过程中, 有时候需要对资源进行等待, channel就是最典型的资源.
channel的数据定义在这里, 其中关键的成员如下:
- qcount: 当前队列中的元素数量
- dataqsiz: 队列可以容纳的元素数量, 如果为0表示这个channel无缓冲区
- buf: 队列的缓冲区, 结构是环形队列
- elemsize: 元素的大小
- closed: 是否已关闭
- elemtype: 元素的类型, 判断是否调用写屏障时使用
- sendx: 发送元素的序号
- recvx: 接收元素的序号
- recvq: 当前等待从channel接收数据的G的链表(实际类型是sudog的链表)
- sendq: 当前等待发送数据到channel的G的链表(实际类型是sudog的链表)
- lock: 操作channel时使用的线程锁
发送数据到channel实际调用的是runtime.chansend1函数, chansend1函数调用了chansend函数, 流程是:
- 检查channel.recvq是否有等待中的接收者的G
- 如果有, 表示channel无缓冲区或者缓冲区为空
- 调用send函数
- 如果sudog.elem不等于nil, 调用sendDirect函数从发送者直接复制元素
- 等待接收的sudog.elem是指向接收目标的内存的指针, 如果是接收目标是
_则elem是nil, 可以省略复制 - 等待发送的sudog.elem是指向来源目标的内存的指针
- 复制后调用goready恢复发送者的G
- 切换到g0调用ready函数, 调用完切换回来
- 把G的状态由等待中(_Gwaiting)改为待运行(_Grunnable)
- 把G放到P的本地运行队列
- 如果当前有空闲的P, 但是无自旋的M(nmspinning等于0), 则唤醒或新建一个M
- 切换到g0调用ready函数, 调用完切换回来
- 从发送者拿到数据并唤醒了G后, 就可以从chansend返回了
- 判断是否可以把元素放到缓冲区中
- 如果缓冲区有空余的空间, 则把元素放到缓冲区并从chansend返回
- 无缓冲区或缓冲区已经写满, 发送者的G需要等待
- 获取当前的g
- 新建一个sudog
- 设置sudog.elem = 指向发送内存的指针
- 设置sudog.g = g
- 设置sudog.c = channel
- 设置g.waiting = sudog
- 把sudog放入channel.sendq
- 调用goparkunlock函数
- 从这里恢复表示已经成功发送或者channel已关闭
- 检查sudog.param是否为nil, 如果为nil表示channel已关闭, 抛出panic
- 否则释放sudog然后返回
从channel接收数据实际调用的是runtime.chanrecv1函数, chanrecv1函数调用了chanrecv函数, 流程是:
- 检查channel.sendq中是否有等待中的发送者的G
- 如果有, 表示channel无缓冲区或者缓冲区已满, 这两种情况需要分别处理(为了保证入出队顺序一致)
- 调用recv函数
- 如果无缓冲区, 调用recvDirect函数把元素直接复制给接收者
- 如果有缓冲区代表缓冲区已满
- 把队列中下一个要出队的元素直接复制给接收者
- 把发送的元素复制到队列中刚才出队的位置
- 这时候缓冲区仍然是满的, 但是发送序号和接收序号都会增加1
- 复制后调用goready恢复接收者的G, 处理同上
- 把数据交给接收者并唤醒了G后, 就可以从chanrecv返回了
- 判断是否可以从缓冲区获取元素
- 如果缓冲区有元素, 则直接取出该元素并从chanrecv返回
- 无缓冲区或缓冲区无元素, 接收者的G需要等待
- 获取当前的g
- 新建一个sudog
- 设置sudog.elem = 指向接收内存的指针
- 设置sudog.g = g
- 设置sudog.c = channel
- 设置g.waiting = sudog
- 把sudog放入channel.recvq
- 调用goparkunlock函数, 处理同上
- 从这里恢复表示已经成功接收或者channel已关闭
- 检查sudog.param是否为nil, 如果为nil表示channel已关闭
- 和发送不一样的是接收不会抛panic, 会通过返回值通知channel已关闭
- 释放sudog然后返回
关闭channel实际调用的是closechan函数, 流程是:
- 设置channel.closed = 1
- 枚举channel.recvq, 清零它们sudog.elem, 设置sudog.param = nil
- 枚举channel.sendq, 设置sudog.elem = nil, 设置sudog.param = nil
- 调用goready函数恢复所有接收者和发送者的G
可以看到如果G需要等待资源时,
会记录G的运行状态到g.sched, 然后把状态改为等待中(_Gwaiting), 再让当前的M继续运行其他G.
等待中的G保存在哪里, 什么时候恢复是等待的资源决定的, 上面对channel的等待会让G放到channel中的链表.
对网络资源的等待可以看netpoll相关的处理, netpoll在不同系统中的处理都不一样, 有兴趣的可以自己看看.
参考链接
https://github.com/golang/go
https://golang.org/s/go11sched
http://supertech.csail.mit.edu/papers/steal.pdf
https://docs.google.com/document/d/1ETuA2IOmnaQ4j81AtTGT40Y4_Jr6_IDASEKg0t0dBR8/edit#heading=h.x4kziklnb8fr
https://blog.altoros.com/golang-part-1-main-concepts-and-project-structure.html
https://blog.altoros.com/golang-internals-part-2-diving-into-the-go-compiler.html
https://blog.altoros.com/golang-internals-part-3-the-linker-and-object-files.html
https://blog.altoros.com/golang-part-4-object-files-and-function-metadata.html
https://blog.altoros.com/golang-internals-part-5-runtime-bootstrap-process.html
https://blog.altoros.com/golang-internals-part-6-bootstrapping-and-memory-allocator-initialization.html
http://blog.rchapman.org/posts/Linux_System_Call_Table_for_x86_64
http://legendtkl.com/categories/golang
http://www.cnblogs.com/diegodu/p/5803202.html
https://www.douban.com/note/300631999/
http://morsmachine.dk/go-scheduler
legendtkl很早就已经开始写golang内部实现相关的文章了, 他的文章很有参考价值, 建议同时阅读他写的内容.
morsmachine写的针对协程的分析也建议参考.
golang中的协程实现非常的清晰, 在这里要再次佩服google工程师的功力, 可以写出这样简单易懂的代码不容易.
调度 GMP的更多相关文章
- 重新梳理调度器——GMP 调度模型
调度器--GMP 调度模型 Goroutine 调度器,它是负责在工作线程上分发准备运行的 goroutines. 首先在讲 GMP 调度模型之前,我们先了解为什么会有这个模型,之前的调度模型是什么样 ...
- 深入Golang调度器之GMP模型
前言 随着服务器硬件迭代升级,配置也越来越高.为充分利用服务器资源,并发编程也变的越来越重要.在开始之前,需要了解一下并发(concurrency)和并行(parallesim)的区别. 并发: 逻 ...
- Golang调度器GMP原理与调度全分析(转 侵 删)
该文章主要详细具体的介绍Goroutine调度器过程及原理,包括如下几个章节. 第一章 Golang调度器的由来 第二章 Goroutine调度器的GMP模型及设计思想 第三章 Goroutine调度 ...
- 图解协程调度模型-GMP模型
现在无论是客户端.服务端或web开发都会涉及到多线程的概念.那么大家也知道,线程是操作系统能够进行运算调度的最小单位,同一个进程中的多个线程都共享这个进程的全部系统资源. 线程 三个基本概念 内核线程 ...
- 2. Go并发编程--GMP调度
目录 1. 前言 1.1 Goroutine 调度器的 GMP 模型的设计思想 1.2 GMP 模型 1.3. 有关M和P的个数问题 1.4 P 和 M 何时会被创建 2. 调度器的设计策略 3. g ...
- GO GMP协程调度实现原理 5w字长文史上最全
1 Runtime简介 Go语言是互联网时代的C,因为其语法简洁易学,对高并发拥有语言级别的亲和性.而且不同于虚拟机的方案.Go通过在编译时嵌入平台相关的系统指令可直接编译为对应平台的机器码,同时嵌入 ...
- golang GMP goroutine调度器
Goroutine可以动态的伸缩栈的大小,最小2-4kb,最大1GB
- Golang 的 协程调度机制 与 GOMAXPROCS 性能调优
作者:林冠宏 / 指尖下的幽灵 掘金:https://juejin.im/user/587f0dfe128fe100570ce2d8 博客:http://www.cnblogs.com/linguan ...
- 图解Go协程调度原理,小白都能理解
阅读本文仅需五分钟,golang协程调度原理,小白也能看懂,超实用. 什么是协程 对于进程.线程,都是有内核进行调度,有CPU时间片的概念,进行抢占式调度.协程,又称微线程,纤程.英文名Corouti ...
随机推荐
- Sentinel并发限流不精确-之责任链
在之前调研Sentinel的过程中,为了准备分享内容,自己就简单的写了一些测试代码,不过在测试中遇到了一些问题,其中有一个问题就是Sentinel流控在并发情况下限流并不精确,当时我还在想,这个我 ...
- vue3.0自定义指令(drectives)
在大多数情况下,你都可以操作数据来修改视图,或者反之.但是还是避免不了偶尔要操作原生 DOM,这时候,你就能用到自定义指令. 举个例子,你想让页面的文本框自动聚焦,在没有学习自定义指令的时候,我们可能 ...
- ProGuard使用文档
介绍 是一个对于Java字节码的免费的压缩器,优化器,混淆器和审核器: l 它检测并删除未使用的类,字段,方法和属性. l 它优化字节码并删除未使用的指令. l 它重命名其余类.字段和方法使用短 ...
- Long类型数据传递到前端数据精度丢失问题
在开发页面的时候,遇到Long类型的数据,传送给前端遇到精度丢失的问题, 后端发的数据是这个. 前端接收到的数据是这样 解决的途径有二种:1 .在后端把Long类型的数据改成String类型(不推荐) ...
- 从最长公共子序列问题理解动态规划算法(DP)
一.动态规划(Dynamic Programming) 动态规划方法通常用于求解最优化问题.我们希望找到一个解使其取得最优值,而不是所有最优解,可能有多个解都达到最优值. 二.什么问题适合DP解法 如 ...
- 听说又有兄弟因为用YYYY-MM-dd被锤了...
还记得去年分享过一篇日期格式化使用 YYYY-MM-dd 的潜在问题的文章不? 历史又重演了... 事故现场 我们来写个单元测试,重现一下这个问题. 测试逻辑: 创建两个日期格式化,一个是出问题的YY ...
- harbor安装实操笔记
纸上得来终觉浅,实操一遍吧! 把所有开发的后端服务先在打成镜像,传到私有镜像仓库: 然后在任意的远程机器拉取镜像,然后可采用docker或者docker-compose的方式运行,本节先按照docke ...
- chrome实现网页高清截屏(F12、shift+ctrl+p、capture)
打开需要载屏的网页,在键盘上按下F12,出现以下界面 上图圈出的部分有可能会出现在浏览器下方,这并没有关系.此时按下 Ctrl + Shift + P(Mac 为 ⌘Command +⇧Shift + ...
- 高效实用linux命令之-history
History(历史)命令用法 15 例 如果你经常使用 Linux 命令行,那么使用 history(历史)命令可以有效地提升你的效率.本文将通过实例的方式向你介绍 history 命令的 15 个 ...
- JVM笔记——类加载
1.在java代码中,类型(如class enum interface)的加载.连接.初始化过程都是在程序运行期完成的.这个特性,使得本为静态语言的java,拥有了动态语言的某些特征 加载:查找并加载 ...