Lane-Detection 近期车道线检测论文阅读总结
近期阅读的几篇关于车道线检测的论文总结。
1. 车道线检测任务需求分析
1.1 问题分析
针对车道线检测任务,需要明确的问题包括:
(1)如何对车道线建模,即用什么方式来表示车道线。
从应用的角度来说,最终需要的是车道线在世界坐标系下的方程。而神经网络更适合提取图像层面的特征,直接回归方程参数不是不可能,但限制太多。
由此,网络推理输出和最终结果之间存在一个Gap,需要相对复杂的后处理去解决。
(2)网络推理做到哪一步。
人在开车时观察车道线,会同时关注两方面信息:
- 绘制在路面上的车道线标识本身
- 通过车道线标识,表征的抽象的车道分隔边界线
同样,在网络结构设计时,也可以把推理目标设置为这两类:
- 图像分割方案倾向于识别第一种信息,对每一个像素是否属于车道线标识,以及标识的类别进行判断。
- 类图像检测方案倾向于识别第二种信息,在设定的一系列anchor中判断是否存在车道线,以及回归车道线的位置参数。
1.2 面临挑战
针对车道线检测任务,面临的挑战主要有:
(1)车道线这种细长的形态结构,需要更加强大的高低层次特征融合,来同时获取全局的空间结构关系,和细节处的定位精度。
(2)车道线的形态有很多不确定性,比如被遮挡,磨损,以及道路变化时本身的不连续性。需要网络针对这些情况有较强的推测能力。
(3)在实际应用中,车辆稳定行驶在车道中央的工况并不算关键工况,车辆的偏离或换道过程才是关键工况,此时会产生自车所在车道的切换,车道线也会发生左/右线的切换。
据此,一些提前给车道线赋值固定序号的方法,在实际使用中是有巨大缺陷的,在换道过程中会产生歧义的情况。
这种方法在刷数据集指标的时候可能效果OK,但在应用中,从网络结构设计的角度,无法应对换道这种关键工况。
2. 论文要点解读
按照arXiv上发布的时间顺序。
《Robust Lane Detection from Continuous Driving Scenes Using Deep Neural Networks》
将车道线检测作为一个分割问题来处理,最后输出车道线前景和背景的2值分割图。
网络整体上使用了CNN+RNN的结构。
CNN的部分采用了常规的Encoder-Decoder结构。
在Encoder和Decoder之间插入ConvLSTM模块,通过ConvLSTM对Encoder部分提取的Feature-map进行处理,提取有用的隐含历史信息。如下图所示:
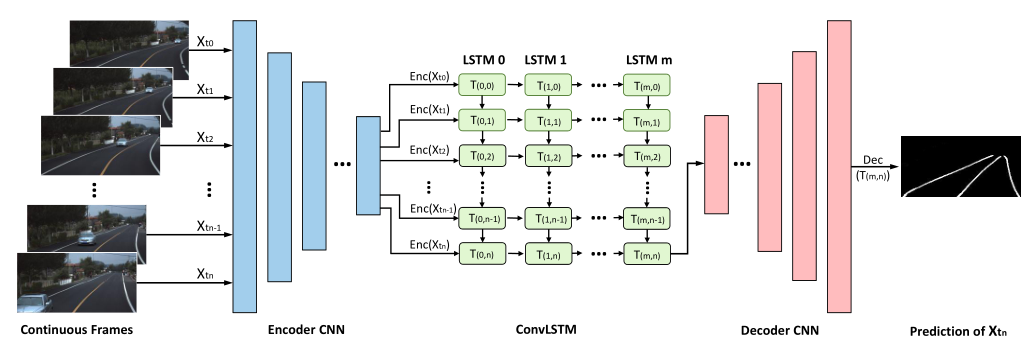
在训练阶段,针对Tusimple数据集,将连续5帧作为输入,并在带有标注的最后一帧计算Loss。
在推理阶段,连续帧图像持续输入,每一帧图像经过处理都会输出对应的推理结果。
《CurveLane-NAS: Unifying Lane-Sensitive Architecture Search and Adaptive Point Blending》
参考了Dense Prediction Based(分割的思路)和 Proposal Based(检测的思路)两种车道线检测的框架,以后者为基础,采用了NAS的方法,获得了一个更适合车道线检测任务的网络结构。
网络整体上可以分为以下几个部分:
- 特征提取及多尺度融合,在这两个阶段均引入了NAS的方法;
- 多尺度检测输出,以充分获取大范围内的全局结构特征,以及小范围内的精确定位
- 结果融合,采用一种叫做
Adaptive Point Blending Search的方法(类似于一种NMS方法,将低层输出中位置精度回归较高的点逐步向高层输出替换,得到最后融合优化的车道线点输出)
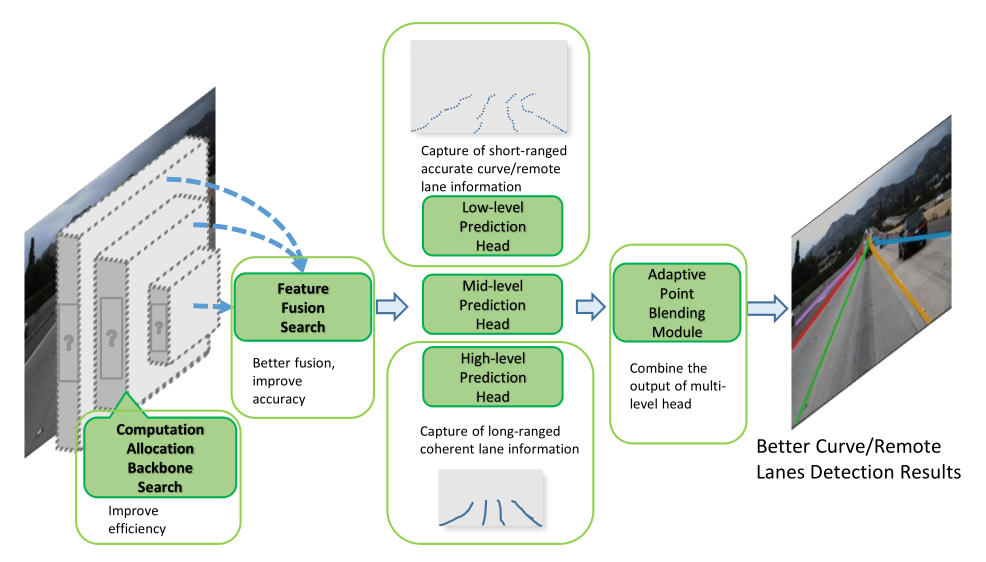
而这篇文章还有一个重大的贡献,即发布了一个大规模的车道线检测公开数据集Curvelanes。在此之前,只有Tusimple和CULane,Curvelanes的体量跟CULane相当,场景更加多样化。
《Heatmap-based Vanishing Point boosts Lane Detection》
网络整体上同样采用Encoder-Decoder结构,在车道线的预测Head以外,增加了一个Head,用于消失点的预测。
将消失点看做一种特殊的关键点,采用Heatmap的方式来预测。
通过这种方式,将消失点预测任务作为一种限制和引导因素,来优化车道线检测的结果。
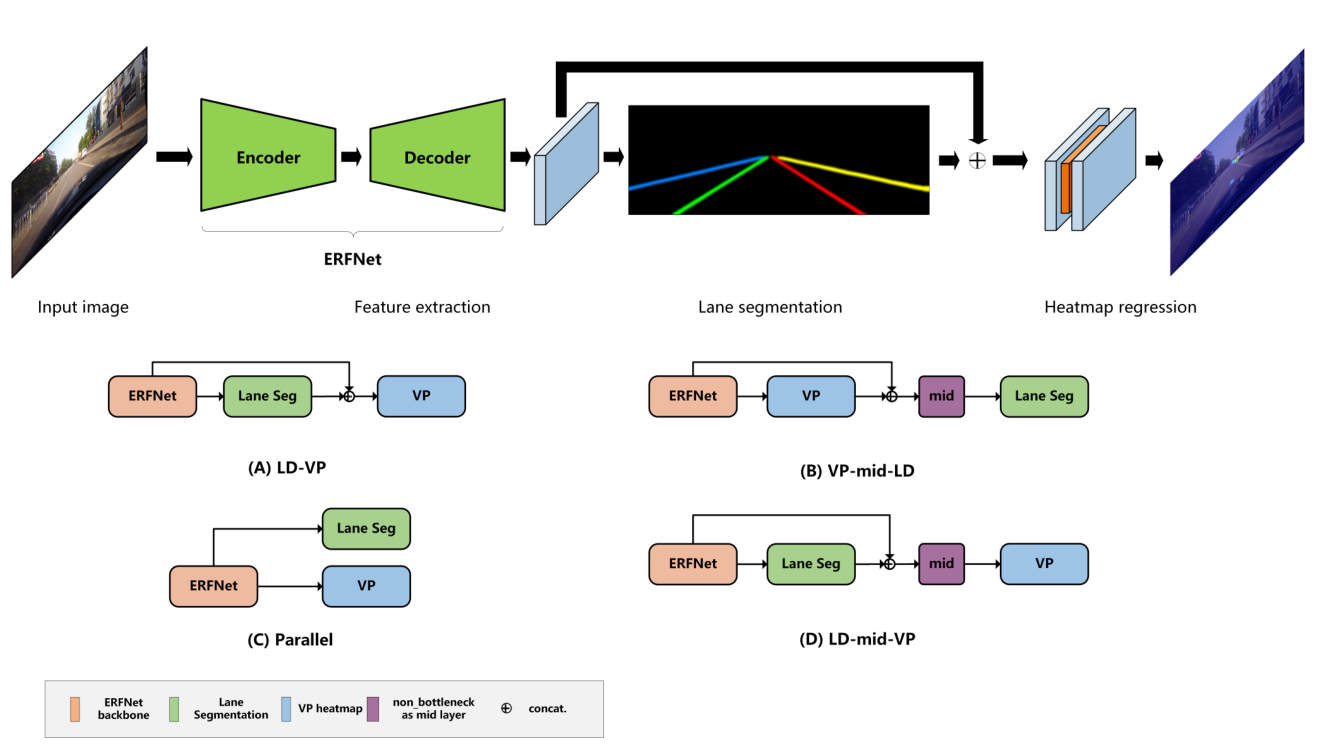
车道线检测和消失点检测,两个任务有多种组合方式。
经试验,LD-mid-VP的结构,在CULane数据集上能够获得最好的结果。这种结构将特征提取阶段的输出和车道线预测的输出进行信息融合,再经过一些卷积层(mid部分)的处理后,输出消失点的预测结果。
从直观层面理解,人根据视觉判断消失点,也是根据车道线的位置关系,来推测消失点位置,具有一定的因果关系。因此把消失点预测任务后置,反过来也能够促进前端的车道线预测任务更好地收敛。
在此之前,还有一篇较有代表性的文章 VPGNet,同样是通过消失点来引导网络学习,以期获得更好的收敛效果。不同的是VPGNet是通过四象限分割的方式来定义消失点位置,感觉不如Heatmap的方式更加符合直觉。
《Lane Detection Model Based on Spatio-Temporal Network with Double ConvGRUs》
整体思路与第一篇论文比较类似。都是Encoder+RNN+Decoder。结构如下图所示:
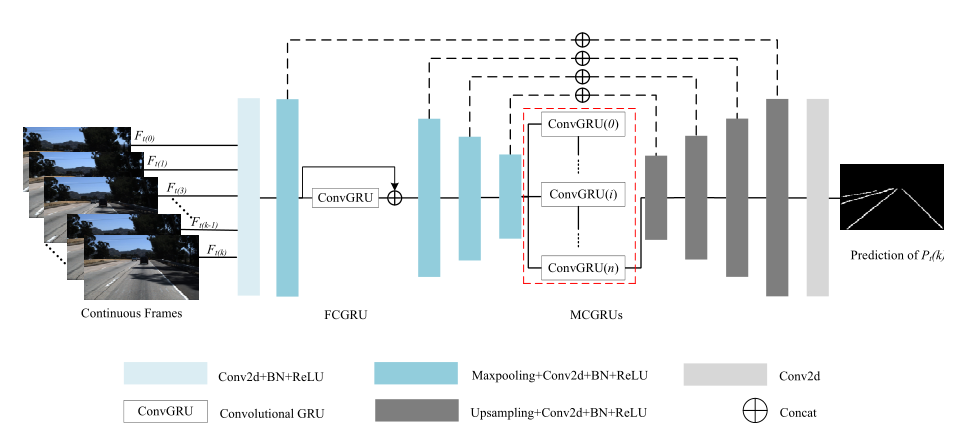
不同的是,它的RNN部分由两个ConvGRU组成,Front-ConvGRU和Middle-ConvGRUs。
Front-ConvGRU位于Encoder部分的第二个卷积模块之后。理论依据主要是认为视觉感知和记忆之间存在联系,因此在低层特征中引入RNN模块。
此处有一点没有理解,从文中给出的结构图看,FCGRU这个模块,并没有在前后帧的时序上产生联系(对比MCGRU的画法可以发现),连接关系类似一个普通的Conv模块,只有一个输入,一个输出。
我不确定是示意图画的问题,还是此处的GRU模块有什么特殊的用法。
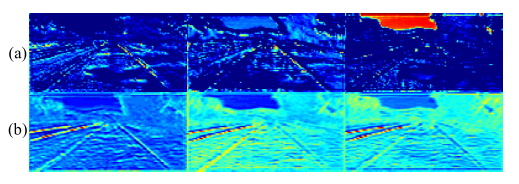
按论文的说法,经FCGRU处理前后的Feature-map可视化结果。车道线特征更加明显突出。
Middle-ConvGRUs位于Encoder和Decoder部分之间,作用主要是用于提取连续帧输入的时序关联信息,与前文所说的ConvLSTM是类似的。
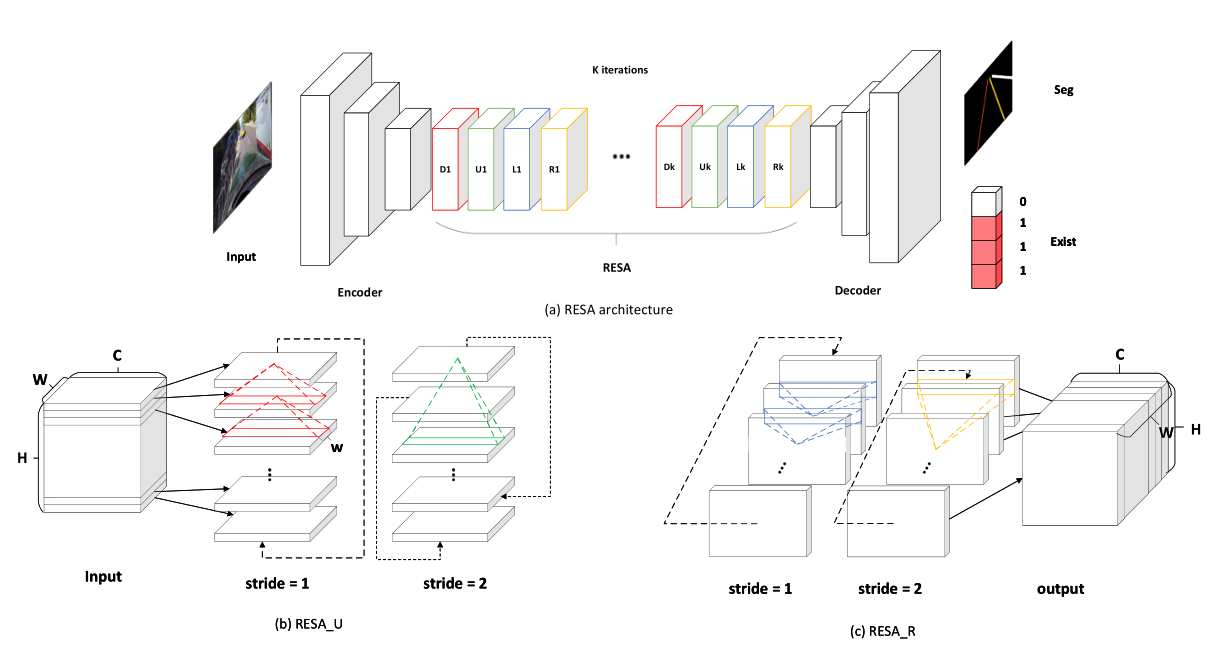
《RESA: Recurrent Feature-Shift Aggregator for Lane Detection》
网络同样基于Encoder-Decoder结构进行改进。在Encoder和Decoder部分之间,插入RESA模块,增强空间结构信息在全局的传播能力。结构如下图所示:
同样的思路可以回溯到SCNN这篇文章。
同样是通过在Encoder-Decoder之间插入一个SCNN模块,来增强网络感知空间结构信息的能力。
按论文的说法,RESA模块比SCNN模块的效率要高,时间复杂度与尺度的关系为$log_2L$。
3. 总体趋势分析
总结近期车道线检测领域的论文,有如下一些发展趋势:
车道线检测的应用场景具有很明显的时序信息特征,为了利用到时序信息,通常采用
Encoder-RNN-Decoder这样的网络架构,利用RNN模块,对Encoder提取的Features进行进一步加工,提取连续帧带来的历史信息。可以参考人的视觉暂留现象,人在开车时观察车道线,能够自觉把虚线识别为一条空间上连续的线,也是利用了前后的时序信息。
在全图分割的思路以外,出现了一些以目标检测的思路来处理车道线检测问题的方法。
此处还有一篇较有代表性的文章 PINet,等读完之后进行补充。
除了车道线检测本身,通过增加一些额外的相关任务,引导网络更好地学习,来获得更好的效果。
Lane-Detection 近期车道线检测论文阅读总结的更多相关文章
- 带你读AI论文丨LaneNet基于实体分割的端到端车道线检测
摘要:LaneNet是一种端到端的车道线检测方法,包含 LanNet + H-Net 两个网络模型. 本文分享自华为云社区<[论文解读]LaneNet基于实体分割的端到端车道线检测>,作者 ...
- 【Papers】Robust Lane Detection via Expanded Self Attention 论文解读
论文题目:Robust Lane Detection via Expanded Self Attention 链接地址:https://arxiv.org/abs/2102.07037 文章核心想要解 ...
- 深度学习笔记(十四)车道线检测 SCNN
论文:Spatial As Deep: Spatial CNN for Traffic Scene Understanding 代码:https://github.com/XingangPan/SCN ...
- 深度学习笔记(十二)车道线检测 LaneNet
论文:Towards End-to-End Lane Detection: an Instance Segmentation Approach 代码:https://github.com/MaybeS ...
- 3D车道线检测:Gen-LaneNet
3D车道线检测:Gen-LaneNet Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection 论文链接:http ...
- opencv车道线检测
opencv车道线检测 完成的功能 图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像 反透视变换:用的是老师给的视频,没有对应的变换矩阵.所以建立二维坐标,通过四点映射的方法计算矩阵,进行反透视 ...
- SCNN车道线检测--(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding(论文解读)
Spatial As Deep: Spatial CNN for Traffic Scene Understanding 收录:AAAI2018 (AAAI Conference on Artific ...
- 车道线检测LaneNet
LaneNet LanNet Segmentation branch 完成语义分割,即判断出像素属于车道or背景 Embedding branch 完成像素的向量表示,用于后续聚类,以完成实例分割 H ...
- 语义分割之车道线检测Lanenet(tensorflow版)
Lanenet 一个端到端的网络,包含Lanenet+HNet两个网络模型,其中,Lanenet完成对车道线的实例分割,HNet是一个小网络结构,负责预测变换矩阵H,使用转换矩阵H对同属一条车道线的所 ...
随机推荐
- myblogplus 第三期 如何更改你博客的图标,已实现 - mooling原创
三言两语 博客的logo可以凸显你的blog的个性 不知道你有没有觉得博客园原始的那个小矿工不好看了呢 fromto 这才是个人博客的style! 为什么要写这篇文章 因为在博客园的“找找看”中,如果 ...
- 白嫖码云Pages,两分钟的事,就能搭个百度能搜到的个人博客平台
为了攒点钱让女儿做个富二代(笑),我就没掏钱买服务器,白嫖 GitHub Pages 搭了一个博客平台.不过遗憾的是,GitHub Pages 只能被谷歌收录,无法被百度收录,这就白白损失了一大波流量 ...
- [oracle/sql]关于清除重复,not in方案和not exists方案的对比
有这样一张表: CREATE TABLE tb_sc ( id NUMBER not null primary key, studentid int not null, courseid int no ...
- linux 用户、用户组的操作
1.查看linux系统下的所有用户 方式一:grep bash /etc/passwd 方式二:查看etc/passwd文件,其他第三个参数大于500的都是用户自己新增的 vim /etc/passw ...
- 入门alibaba的EasyExcel
一.关于EasyExcel 1.什么是EasyExcel,有什么作用? EasyExcel是一个基于Java的简单.省内存的读写Excel的开源项目.在尽可能节约内存的情况下支持读写百M的Excel. ...
- SpringCloud系列之Nacos+Dubbo+Seata应用篇
目录 前言 项目版本 项目说明 Nacos服务 Seata服务 订单模块 支付模块 参考资料 系列文章 前言 本文接上篇文章<SpringCloud系列之Nacos+Dubbo应用篇>继续 ...
- 浅入ABP(1):搭建基础结构的 ABP 解决方案
浅入ABP(1):搭建基础结构的 ABP 解决方案 目录 浅入ABP(1):搭建基础结构的 ABP 解决方案 搭建项目基础结构 ApbBase.Domain.Shared 创建过程 ApbBase.D ...
- adb命令—monkey篇
monkey 目录 monkey 1.Monkey介绍 2.Monkey是用来做什么的 3.Monkey程序介绍 下面就是一些Monkey命令了 1.Monkey介绍 顾名思义,Monkey就是猴子, ...
- vue自适应布局的n中方法
在index.html中 head标签中 <script> //通过window.screen.width获取屏幕的宽度 var offWidth = window.screen.widt ...
- jekins使用的坑
1.日志打满 一个周末回来,服务器的磁盘就写满了 现象如下,最后是修改catalina脚本 添加了如下配置 ###jekins log problem#########export JAVA_OPTS ...