第三篇 视觉里程计(VO)的初始化过程以及openvslam中的相关实现详解
视觉里程计(Visual Odometry, VO),通过使用相机提供的连续帧图像信息(以及局部地图,先不考虑)来估计相邻帧的相机运动,将这些相对运行转换为以第一帧为参考的位姿信息,就得到了相机载体(假设统一的刚体)的里程信息。先上一张本文主要内容的框图:

初始化实例
在实例化跟踪器的时候会实例化一个初始化实例,有一些比较重要的参数需要注意下,看代码注释以及初始值,参数值也可以在yaml文件中自定义。
// src/openvslam/module/initializer.h:83
//! max number of iterations of RANSAC (only for monocular initializer)
const unsigned int num_ransac_iters_;
//! min number of triangulated pts
const unsigned int min_num_triangulated_;
//! min parallax (only for monocular initializer)
const float parallax_deg_thr_;
//! reprojection error threshold (only for monocular initializer)
const float reproj_err_thr_;
//! max number of iterations of BA (only for monocular initializer)
const unsigned int num_ba_iters_;
//! initial scaling factor (only for monocular initializer)
const float scaling_factor_;
// src/openvslam/module/initializer.cc:16
initializer::initializer(const camera::setup_type_t setup_type,
data::map_database* map_db, data::bow_database* bow_db,
const YAML::Node& yaml_node)
: setup_type_(setup_type), map_db_(map_db), bow_db_(bow_db),
num_ransac_iters_(yaml_node["Initializer.num_ransac_iterations"].as<unsigned int>(100)),
min_num_triangulated_(yaml_node["Initializer.num_min_triangulated_pts"].as<unsigned int>(50)),
parallax_deg_thr_(yaml_node["Initializer.parallax_deg_threshold"].as<float>(1.0)),
reproj_err_thr_(yaml_node["Initializer.reprojection_error_threshold"].as<float>(4.0)),
num_ba_iters_(yaml_node["Initializer.num_ba_iterations"].as<unsigned int>(20)),
scaling_factor_(yaml_node["Initializer.scaling_factor"].as<float>(1.0)) {
spdlog::debug("CONSTRUCT: module::initializer");
}
使用不同的相机类型,初始化的方法也不相同,openvslam使用了perspective和bearing_vector两种初始化方法。
// src/openvslam/module/initializer.cc:91
void initializer::create_initializer(data::frame& curr_frm) {
// 将当前帧设置为初始化过程中的参考帧
init_frm_ = data::frame(curr_frm);
// 将当前帧的特征点当作previously matched coordinates
prev_matched_coords_.resize(init_frm_.undist_keypts_.size());
for (unsigned int i = 0; i < init_frm_.undist_keypts_.size(); ++i) {
prev_matched_coords_.at(i) = init_frm_.undist_keypts_.at(i).pt;
}
// initialize matchings (init_idx -> curr_idx)
std::fill(init_matches_.begin(), init_matches_.end(), -1);
// build a initializer
initializer_.reset(nullptr);
switch (init_frm_.camera_->model_type_) {
case camera::model_type_t::Perspective:
case camera::model_type_t::Fisheye: {
initializer_ = std::unique_ptr<initialize::perspective>(new initialize::perspective(init_frm_,
num_ransac_iters_, min_num_triangulated_,
parallax_deg_thr_, reproj_err_thr_));
break;
}
case camera::model_type_t::Equirectangular: {
initializer_ = std::unique_ptr<initialize::bearing_vector>(new initialize::bearing_vector(init_frm_,
num_ransac_iters_, min_num_triangulated_,
parallax_deg_thr_, reproj_err_thr_));
break;
}
}
// 设置状态为初始化状态
state_ = initializer_state_t::Initializing;
}
执行完上面的函数后回直接直接退出,然后读取下一帧图像,进入初始化阶段。下面的匹配过程,在上一篇已经详细讲过了,有一点需要注意在匹配完成后,会将匹配到的点的prev_matched_coords_改为当前帧的特征点座标。如果匹配到的点数小于min_num_triangulated_(这里是50),则直接重置初始化,会把下一帧当作初始化的参考帧。
bool initializer::try_initialize_for_monocular(data::frame& curr_frm) {
assert(state_ == initializer_state_t::Initializing);
match::area matcher(0.9, true);
const auto num_matches = matcher.match_in_consistent_area(init_frm_, curr_frm, prev_matched_coords_, init_matches_, 100);
if (num_matches < min_num_triangulated_) {
// rebuild the initializer with the next frame
reset();
return false;
}
// try to initialize with the current frame
assert(initializer_);
return initializer_->initialize(curr_frm, init_matches_);
}
初始化过程
通过计算单应矩阵和基础矩阵,评估出两帧之间的变换矩阵。首先搞清楚几个基本概念。
基础(Fundamental)矩阵
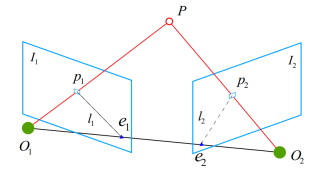
假设\(I1\)与\(I2\)为相邻帧,\(p1\)与\(p2\)为相邻帧匹配到的特征点,P为特征点的空间位置。対极约束描述了图像中特征点位置与帧间运动信息之间的关系。用过几何计算我们可以得到如下公式(对极约束)。具体推导可以参考两视图对极约束-基础矩阵:
\]
定义本质矩阵\(E=t^{\wedge }R\),基础矩阵\(F=K^{-T}EK\)。通过匹配点对儿的像素位置可以计算出\(E或F\),进而计算出\(R,t\)。
此外,假设相邻相机只做了旋转运动,即t为0,可以看到対极约束对于任意R都成立,因此想要通过对极约束评估相机运动内在要求不能只是纯旋转运动(可以使用单应矩阵来求解)。
单应Homography
单应(Homography)是射影几何中的概念,又称为射影变换。它把一个射影平面上的点(三维齐次矢量)映射到另一个射影平面上,并且把直线映射为直线,具有保线性质。总的来说,单应是关于三维齐次矢量的一种线性变换,可以用一个3×3的非奇异矩阵\(H\)表示:
\begin{pmatrix}h_{11} & h_{12} & h_{13}\\h_{21} & h_{22} & h_{23}\\ h_{31} & h_{32} & h_{33}\end{pmatrix}
\begin{pmatrix}u_2\\ v_2\\ 1\end{pmatrix}
\]
其中,\((u1,v1,1)^T\)表示图像1中的像点,\((u2,v2,1)^T\)是图像2中的像点,也就是可以通过单应矩阵H将图像2变换到图像1,描述的是两个平面之间的映射关系。
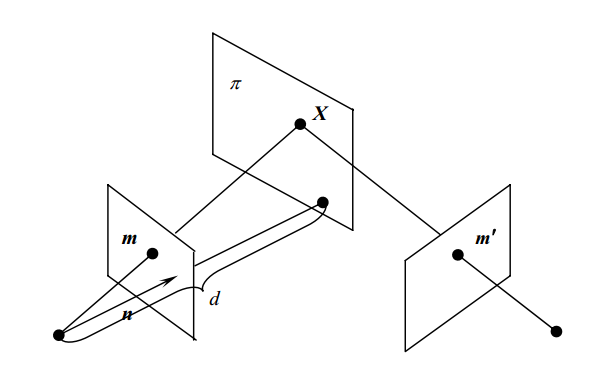
上图表示场景中的平面\(π\)在两相机的成像,设平面\(π\)在第一个相机坐标系下的单位法向量为\(n^T\),其到第一个相机中心(坐标原点)的距离为\(d\),则平面\(π\)可表示为:
\]
其中,\(X_1\)是三维点P在第一相机坐标系下的坐标,其在第二个相机坐标系下的坐标为\(X_2\),则
X_2 = RX_1 + t\frac{1}{d}n^TX_1=(R+t\frac{1}{d}n^T)X_1=HX_1 \\
H = R+t\frac{1}{d}n^T\]
假设\(p_1,p_2\)为\(X_1,X_2\)对应的图像上的点,则
H = K(R+t\frac{1}{d}n^T)K^{-1}\]
这样求解出\(H\)便可以求解出\(R,t\),并却\(t=0\)也不影响求解R。
实践
在实际中,通常会同时计算H和F。
\\ src/openvslam/initialize/perspective.cc:27
bool perspective::initialize(const data::frame& cur_frm, const std::vector<int>& ref_matches_with_cur)
{
...
// compute H and F matrices
auto homography_solver = solve::homography_solver(ref_undist_keypts_, cur_undist_keypts_, ref_cur_matches_, 1.0);
auto fundamental_solver = solve::fundamental_solver(ref_undist_keypts_, cur_undist_keypts_, ref_cur_matches_, 1.0);
std::thread thread_for_H(&solve::homography_solver::find_via_ransac, &homography_solver, num_ransac_iters_, true);
std::thread thread_for_F(&solve::fundamental_solver::find_via_ransac, &fundamental_solver, num_ransac_iters_, true);
thread_for_H.join();
thread_for_F.join();
...
}
初始化
使用两个线程分别计算H和F矩阵
homography_solver::find_via_ransac
fundamental_solver::find_via_ransac
通过判断0.4<rel_score_H = score_H / (score_H + score_F来决定用H还是F来评估R,t,
在评估的过程中还会通过三角化确定特征点的空间位置信息
通过一些列复杂的筛选得出到满足条件的R,t即算完成初始化
看完下面的文章再回过头来看这段话。总的来说初始化过程涉及到多视几何的基础内容很多,openvlsam的实现很大程度上都是借鉴ORB2的实现方法(三角化除外)。可以看到由于要求前后帧(可以中间隔若干帧)特征点有一定的视差,想要成功的初始化就一定要发生位移。由于同时评估H和F矩阵,纯旋转也有初始化成功的可能性,但是需要有比较多的特征点在相同的平面上。不过最好还是就有旋转又有平移吧。这里在评估过程中都是采用归一化平面上的特征点(没有深度信息),所以得到的t是不知道其物理尺度的,然后三角化又是基于R,t求解的,因此特征点的空间位置值,也是无法知道其物理尺度的,可以认为尺度和t一致。
homography_solver::find_via_ransac
首先正则化特征点,目的是为了后面使用RANSAC(就是随即从大样本集抽取小样本集用于求解问题的方法)计算SVD时得到更一致的解决,消除特征点在图像中位置分布对结果的影响。更详细的解释可参考《Multiple View Geometry in Computer Vision 》P104 “4.4 Transformation invariance and normalization”。
openvslam采样的方法略有不同,分析如下。
\\src/openvslam/solve/common.cc:6
void normalize(const std::vector<cv::KeyPoint>& keypts, std::vector<cv::Point2f>& normalized_pts, Mat33_t& transform) {
计算单应矩阵
正则化特征点
循环num_ransac_iters_=100次
生成8个点的RANSAC序列
计算正则化特征点的单应矩阵compute_H_21
计算特征点的单应矩阵
评估当前求解出单应矩阵的好坏,更新最好的结果
将筛选过的好的点重新评估H矩阵,得到最优结果
正则化特征点
正则化的公式如下,还是比较直观的。
\bar{x} = {\Sigma{x_i} \over N},\bar{y} = {\Sigma{y_i} \over N} \\
\sigma_x = {\Sigma{\left|x_i - \bar{x}\right|} \over N}, \sigma_y = {\Sigma{\left|y_i - \bar{y}\right|} \over N} \\
\begin{pmatrix}x_i^{\prime} \\ y_i^{\prime} \\ 1\end{pmatrix}=
\begin{pmatrix}1/\sigma_x & 0 & -\frac{\bar{x}}{\sigma_x} \\ 0 & 1/\sigma_y & -\frac{\bar{y}}{\sigma_y} \\ 0 & 0 & 1\end{pmatrix}
\begin{pmatrix}x \\ y \\ 1\end{pmatrix}=T\begin{pmatrix}x \\ y \\ 1\end{pmatrix}\]
\(x_i^{\prime},y_i^{\prime}\)为正则化后的座标值,T就是正则化矩阵。
compute_H_21
参考https://www.uio.no/studier/emner/matnat/its/UNIK4690/v16/forelesninger/lecture_4_3-estimating-homographies-from-feature-correspondences.pdf
计算特征点的单应矩阵
程序中normalized_H_21表示则正则化的参考帧到当前帧的单应矩阵。
H_21_in_sac: 帧1->帧2的homography, 注意21表示的是1->2。
p^{\prime}_{ref} = T_{ref}p_{ref} \\
\]
\(T_{cur},T_{ref}\)是当前帧特征点和参考帧特征点的正则化矩阵。
\]
\(H^{\prime}_{rc}\)是正则化当前帧特征点与正则化参考帧特征点的单应矩阵。展开得到:
p_{cur}=T^{-1}_{cur}H^{\prime}_{cr}T_{ref}p_{ref}
\]
因此当前帧特征点与参考帧特征点的单应矩阵\(H_{cr}\)为:
\]
评估当前求解出单应矩阵的好坏
说实话,研究了半天也没搞清楚是如何和卡方检验联系起来的。在我看来就是定义了一个最小重投影误差门限(5.991),重投影误差小于门限就标记为inlier, 将最好的结果保存下来。这里面作者只累加小于门限的重投影误差,即score += 门限值 - 重投影误差,这个差值是>0的,这样做的好处大家可以思考下。
fundamental_solver::find_via_ransac
同样是先正则化特征点,然后采用RANSAC的方法计算F矩阵compute_F_21,过程和计算H矩阵完全一致。
从F或H恢复R,t
//src/openvslam/initialize/perspective.cc:91
bool perspective::reconstruct_with_H(const Mat33_t& H_ref_to_cur, const std::vector<bool>& is_inlier_match)
//src/openvslam/initialize/perspective.cc:114
bool perspective::reconstruct_with_F(const Mat33_t& F_ref_to_cur, const std::vector<bool>& is_inlier_match)
reconstruct_with_H: Motion and structure from motion in a piecewise planar environment (Faugeras et al. in IJPRAI 1988)
reconstruct_with_F: https://en.wikipedia.org/wiki/Essential_matrix#Determining_R_and_t_from_E
在得到若干组候选的R,t后,需要计算找到最佳的R,t。
// src/openvslam/initialize/base.cc:31
bool base::find_most_plausible_pose
寻找最佳位姿
逐个候选位姿进行check_pose
选取有效点最多的那组位姿,做以下判断:
1.有效点数必须大于min_num_triangulated_(50);
2.一个好的结果应该是只有一组有比较多的有效点,,如果发现有很多组都有个数相近的有效点,则这些位姿都不对;
3.视差不能太小,因为太小的视差评估出的深度不可靠,这里的门限parallax_deg_thr_=1度;
在评估R,t的同时会对特征点进行三角化,注意保存到triangulated_pts_的点是特征点在参考帧下的三维坐标。
check_pose
// src/openvslam/initialize/base.cc:86
unsigned int base::check_pose
循环所有的匹配点
三角化计算得到特征点在参考帧下的三维坐标
计算视差角的余弦值(向量内积的方法)
排除视差小于0.5度和深度为负数的三维坐标
验证特征点是否在参考帧和当前帧中可见,重投影误差L2 < 16
以上条件都满足的点才认为有效
对视差排序后返回第50小或者(个数小于50则返回最小)的视差
问题
- 评估H和F矩阵的好坏时是如何转为卡方检验的?
已解决,见 SLAM中的卡方分布。 - triangulator::triangulate还没有彻底搞明白?
第三篇 视觉里程计(VO)的初始化过程以及openvslam中的相关实现详解的更多相关文章
- 第四篇 跟踪过程以及openvslam中的相关实现详解
在成功初始化之后,会创建地图以及局部地图. 创建地图 在初始化正常过后,紧接着会创建地图 // src/openvslam/module/initializer.cc:67 // create new ...
- 第一篇 特征提取以及openvslam中的相关实现详解
参考尺度空间理论 金字塔 当用一个机器视觉系统分析未知场景时,计算机没有办法预先知道图像中物体尺度,因此,我们需要同时考虑图像在多尺度下的描述,获知感兴趣物体的最佳尺度.所以在很多时候,我们会在将图像 ...
- 第二篇 特征点匹配以及openvslam中的相关实现详解
配置文件 在进入正题之前先做一些铺垫,在openvslam中,配置文件是必须要正确的以.yaml格式提供,通常需要指明使用的相机模型,ORB特征检测参数,跟踪参数等. #==============# ...
- SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解
想要从二维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM中,相机通常是提前标定好的.张正友于1998年在论文:"A Flexible New Technique fro Cam ...
- SLAM——视觉里程计(一)feature
从现在开始下面两篇文章来介绍SLAM中的视觉里程计(Visual Odometry).这个是我们正式进入SLAM工程的第一步,而之前介绍的更多的是一些基础理论.视觉里程计完成的事情是视觉里程计VO的目 ...
- SLAM入门之视觉里程计(1):特征点的匹配
SLAM 主要分为两个部分:前端和后端,前端也就是视觉里程计(VO),它根据相邻图像的信息粗略的估计出相机的运动,给后端提供较好的初始值.VO的实现方法可以根据是否需要提取特征分为两类:基于特征点的方 ...
- 关于视觉里程计以及VI融合的相关研究(长期更新)
1. svo 源码:https://github.com/uzh-rpg/rpg_svo 国内对齐文章源码的研究: (1)冯斌: 对其代码重写 https://github.com/yueying/O ...
- SLAM入门之视觉里程计(2):相机模型(内参数,外参数)
相机成像的过程实际是将真实的三维空间中的三维点映射到成像平面(二维空间)过程,可以简单的使用小孔成像模型来描述该过程,以了解成像过程中三维空间到二位图像空间的变换过程. 本文包含两部分内容,首先介绍小 ...
- SLAM入门之视觉里程计(5):单应矩阵
在之前的博文OpenCV,计算两幅图像的单应矩阵,介绍调用OpenCV中的函数,通过4对对应的点的坐标计算两个图像之间单应矩阵\(H\),然后调用射影变换函数,将一幅图像变换到另一幅图像的视角中.当时 ...
随机推荐
- C语言数据类型及变量整理
数据类型 获取int的字节数大小方法 printf("int bytes:%d",sizeof(int)); 列表整理 类型 字节数 取值范围 char 1 [-128,127]= ...
- python3 导入包总提示no moudle named xxx
一.python中的包有三种 1.python自带的包,如sys, os 2.python的第三方库,如 requests, selenium 3.自己写的.py文件 二.今天主要说下导入自己写的包 ...
- Eclipse "Adb failed to restart !"
今天遇到这个问题,如图所示: 上网找了下,原来是电脑上的各种手机助手抢占了手机链接.http://blog.csdn.net/zhufuing/article/details/19398125 说得很 ...
- ubuntu 13.10 eclipse 菜单栏不可用的问题
最近手贱,从官网上下载了最新的版eclipse,把一原来的3.8版本替换了,然后就发现eclipse菜单栏废了,吓我一跳,以为Ubuntu又初问题,又重新弄了一次eclipse(我直接用的压缩包),上 ...
- poj 2524 Ubiquitous Religions(简单并查集)
对与知道并查集的人来说这题太水了,裸的并查集,如果你要给别人讲述并查集可以使用这个题当做例题,代码中我使用了路径压缩,还是有一定优化作用的. #include <stdio.h> #inc ...
- maven的编译规范
maven的中央仓库上的jar的包名必须小写.否则maven编译不通过. 如:Memcached-Java-Client-3.0.2 的jar包. 目录如下: com.whalin.memcached ...
- Git 学习笔记之(一) 使用 git gui 从github上下载代码
背景: 目前一些开源代码均在 GitHub上管理的,包括自己写的代码也可以放在上面进行管理.但问题是,当你换一台电脑,想要将你自己放在 GitHub 上的代码工程下载下来的时候,会遇到各种问题,目前可 ...
- 基于spring的观察者模式
简单的说,观察者模式,就类似于 广播站发送广播,和收音机的关系.多个收音机去收听同一个广播频道. 在实际的业务场景中,可以是这样的.创建订单成功后,发布事件.然后减库存.发送短信.调用微信.调用物流服 ...
- Zabbix编译安装(全)
一.前言 (一).概述 Zabbix是一个基于WEB界面的提供分布式系统监视以及网络监视功能的企业级的开源解决方案,Zabbix能监视各种网络参数,保证服务器系统的安全运营:并提供灵活的通知机制以让系 ...
- 携程 Apollo 配置中心传统 .NET 项目集成实践
官方文档存在的问题 可能由于 Apollo 配置中心的客户端源码一直处于更新中,导致其相关文档有些跟不上节奏,部分文档写的不规范,很容易给做对接的新手朋友造成误导. 比如,我在参考如下两个文档使用传统 ...