UVA 503 Parallelepiped walk
https://vjudge.net/problem/UVA-503
题目
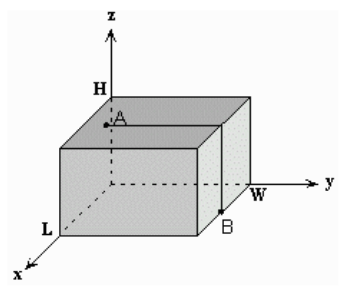
给出一个长方体和长方体上两点的坐标,求两点的沿着长方体表面走的最小距离
题解
沿着表面走就是在展开图上面走,如果分类讨论就需要考虑很多情况,比如两个相邻的面、相对的面,有时候需要走4个展开面,有时候要走3个,是不是走的面越多距离越长,这些都说不清楚……而且手动写出所有情况很麻烦……
于是只有选择模拟展开这个长方体了,需要考虑很多细节,比如给面编号,把每个点对应到面的坐标找出来,然后还要判断走展开图是否不会超出每个面
这时我写过的最长的模拟了……
AC代码
#include<cstdio>
#include<cmath>
#include<cctype>
#include<algorithm>
#include<cstring>
#include<vector>
#include<cassert>
#include<map>
#include<string>
using namespace std;
#define REP(r,x,y) for(register int r=(x); r<y; r++)
#define REPE(r,x,y) for(register int r=(x); r<=y; r++)
#ifdef sahdsg
#define DBG(...) printf(__VA_ARGS__)
#else
#define DBG(...) (void)0
#endif #define MAXN 10007
int l,w,h;
inline int calc(int a, int b) {return a*a+b*b;}
inline int tabs(int x) {return x<0?-x:x;}
#define LL long long
template <class T, int z>
struct A{
T data[z];
int n;
A():n(0) {}
T& operator[](int q) {return data[q];}
inline void push(T x) {data[n++]=x;}
inline T& pop() {return data[--n];}
};
#define EPS 1e-6
inline int dcmp(double x) {return fabs(x)<EPS?0:(x<0?-1:1);}
#define D Point
#define CD const D
struct Point {
double x,y;
};
struct Box {
int x,y,w,h;
};
D operator-(CD&l, CD&r) {return (D){l.x-r.x,l.y-r.y};}
D operator+(CD&l, CD&r) {return (D){l.x+r.x,l.y+r.y};}
D operator*(CD&l, double r) {return (D){l.x*r, l.y*r};}
bool operator<(CD&l, CD&r) {
return dcmp(l.x-r.x)<0 ||
(dcmp(l.x-r.x)==0 && dcmp(l.y-r.y)<0);
}
double cross(CD&l, CD&r) {return l.x*r.y-l.y*r.x;}
double dot(CD&l, CD&r) {return l.x*r.x+l.y*r.y;}
bool onseg(CD&p, CD&a, CD&b) {
return dcmp(cross(a-p,b-p))==0&&dcmp(dot(a-p,b-p))<0;
}
bool segsec(CD&a, CD&b, CD&c, CD&d) {
if(onseg(a,c,d) || onseg(b,c,d) || onseg(c,a,b) || onseg(d,a,b)) return 1;
double c1=cross(b-a,c-a), c2=cross(b-a,d-a), c3=cross(d-c,a-c), c4=cross(d-c,b-c);
return dcmp(c1)*dcmp(c2)<0 && dcmp(c3)*dcmp(c4)<0;
}
D intersec (CD&a, CD&b, CD&c, CD&d) {
D v=b-a,w=d-c,u=a-c;
double t=cross(w,u)/cross(v,w);
return a+v*t;
}
bool inbox(D p, Box&r) {
p.x-=r.x,p.y-=r.y;
return dcmp(p.x)>=0 && dcmp(p.x-r.w)<=0 && dcmp(p.y)>=0 && dcmp(p.y-r.h)<=0;
}
#undef D
#undef CD
inline int id(int x, int y, int z) {
if(x==l) return 0;
if(y==0) return 1;
if(y==w) return 2;
if(z==h) return 3;
if(z==0) return 4;
//if(x==0) ans=5;
return 5;
}
struct P {
int x,y,z;
int id;
int dx,dy;
} p,q;
const int way[6][6]={
{0,1,2,3,4,5}, {1,5,0,3,4,2}, {2,0,5,3,4,1}, {3,1,2,5,0,4}, {4,1,2,0,5,3}, {5,2,1,3,4,0}
};
const int *len[6][4]={
{&h,&h,&w,&w}, {&h,&h,&l,&l}, {&h,&h,&l,&l}, {&l,&l,&w,&w}, {&l,&l,&w,&w}, {&h,&h,&w,&w}
};
inline void task1(int x,int y, int z, int id, int&dx, int &dy) {
switch(id) {
case 0: dx=y,dy=h-z;break;
case 1: dx=x,dy=h-z;break;
case 2: dx=l-x,dy=h-z;break;
case 3: dx=y,dy=x;break;
case 4: dx=y,dy=l-x;break;
case 5: dx=w-y,dy=h-z;break;
}
}
bool vis[6];
A<int,6> op;
int oid[6];
const int _1[]={1,5,0,3,4,2};
const int _2[]={2,0,5,3,4,1};
const int _3[]={3,1,2,5,0,4};
const int _4[]={4,1,2,0,5,3};
inline void rotateO(int x) {
int ooid[6];
switch(x) {
case 1: REP(i,0,6) ooid[i]=oid[_1[i]];break;
case 2: REP(i,0,6) ooid[i]=oid[_2[i]];break;
case 3: REP(i,0,6) ooid[i]=oid[_3[i]];break;
case 4: REP(i,0,6) ooid[i]=oid[_4[i]];break;
default: assert(false);
}
memcpy(oid,ooid,sizeof oid);
}
const int fan[]={0 ,2,1,4,3};
bool findp() {
if(oid[0]==p.id) return true;
vis[oid[0]]=1;
REPE(i,1,4) if(!vis[oid[i]]) {
op.push(i); rotateO(i);
if(findp()) return true;
op.n--; rotateO(fan[i]);
}
vis[oid[0]]=0;
return false;
}
void dop();
void findq(int op1, int op2) {
if(oid[0]==q.id) {dop(); return;}
vis[oid[0]]=1;
if(!vis[oid[op1]]) {
op.push(op1); rotateO(op1);
findq(op1,op2);
op.n--; rotateO(fan[op1]);
}
if(!vis[oid[op2]]) {
op.push(op2); rotateO(op2);
findq(op1,op2);
op.n--; rotateO(fan[op2]);
}
vis[oid[0]]=0;
}
inline void turnleft(int &x,int &y,int id) {
int nx, ny; nx=y,ny=(*len[id][3-1])-x;
x=nx,y=ny;
}
inline void turnright(int &x, int &y, int id) {
int nx, ny; ny=x, nx=(*len[id][1-1])-y;
x=nx,y=ny;
}
inline void turn180(int &x, int &y, int id) {
int nx, ny; nx=(*len[id][3-1])-x, ny=(*len[id][1-1])-y;
x=nx,y=ny;
}
inline void rotateP(P&x,int z) {
const int _[]={1,5,2,0};
const int Z[]={3,5,4,0};
switch(z) {
case 1:
case 2:
if(z==1) {
if(x.id==3) {turnleft(x.dx,x.dy,x.id);}
if(x.id==4) {turnright(x.dx,x.dy,x.id);}
x.id=_2[x.id];
}
if(z==2) {
if(x.id==3) {turnright(x.dx,x.dy,x.id);}
if(x.id==4) {turnleft(x.dx,x.dy,x.id);}
x.id=_1[x.id];
} break;
case 3:
case 4:
if(z==3) {
if(x.id==1) {turnright(x.dx,x.dy,x.id);}
if(x.id==2) {turnleft(x.dx,x.dy,x.id);}
if(x.id==4) {turn180(x.dx,x.dy,x.id);}
if(x.id==5) {turn180(x.dx,x.dy,x.id);}
x.id=_4[x.id];
}
if(z==4) {
if(x.id==1) {turnleft(x.dx,x.dy,x.id);}
if(x.id==2) {turnright(x.dx,x.dy,x.id);}
if(x.id==3) {turn180(x.dx,x.dy,x.id);}
if(x.id==5) {turn180(x.dx,x.dy,x.id);}
x.id=_3[x.id];
}
break;
default:
assert(false);
}
}
inline void rotate(int x) {
const int q[]={1,5,2,0};
const int k[]={0,3,5,4};
switch(x) {
case 1:
case 2:
swap(l,w);
break;
case 3:
case 4:
swap(h,l);
break;
default:
assert(false);
}
}
inline void gop() {
REP(i,0,op.n) {
rotateP(p,op[i]); rotateP(q,op[i]);
rotate(op[i]);
}
assert(p.id==0);
}
int ans;
inline void work() {
ans=0x7f7f7f7f;
p.id=id(p.x,p.y,p.z), q.id=id(q.x,q.y,q.z);
task1(p.x,p.y,p.z,p.id,p.dx,p.dy); task1(q.x,q.y,q.z,q.id,q.dx,q.dy);
REP(i,0,6) oid[i]=i;
memset(vis,0,sizeof vis); op.n=0; findp();
gop();
REP(i,0,6) oid[i]=i;
memset(vis,0,sizeof vis); op.n=0; findq(1,3);
memset(vis,0,sizeof vis); op.n=0; findq(2,3);
memset(vis,0,sizeof vis); op.n=0; findq(1,4);
memset(vis,0,sizeof vis); op.n=0; findq(2,4);
printf("%d\n", ans);
}
inline void dop() {
int nowx=0, nowy=0; int ll=l, ww=w, hh=h;
P pp,qq; pp=p,qq=q;
A<int,17> px,py;
A<Point,34> pt;
A<Box,17> pb;
px.push(0), py.push(0);
px.push(*len[0][2-1]), py.push(*len[0][4-1]);
REP(i,0,op.n) {
pb.push((Box){nowx,nowy,*len[0][3-1],*len[0][1-1]});
switch(op[i]) {
case 1:
nowx-=l; px.push(nowx);
break;
case 2:
nowx+=w; px.push(nowx);
break;
case 3:
nowy-=l;py.push(nowy);
break;
case 4:
nowy+=h; py.push(nowy);
break;
default:
assert(false);
}
rotateP(q,op[i]);rotate(op[i]);
}
pb.push((Box){nowx,nowy,*len[0][3-1],*len[0][1-1]});
q.dx+=nowx,q.dy+=nowy;
Point A=(Point){(double)p.dx,(double)p.dy}, B=(Point){(double)q.dx,(double)q.dy};
sort(px.data,px.data+px.n); sort(py.data,py.data+py.n);
pt.push(A); pt.push(B);
REP(i,0,px.n) {
Point D=intersec(A,B,(Point){(double)px[i],0},(Point){(double)px[i],1});
if(onseg(D,A,B)) pt.push(D);
}
REP(i,0,py.n) {
Point D=intersec(A,B,(Point){0,(double)py[i]},(Point){1,(double)py[i]});
if(onseg(D,A,B)) pt.push(D);
}
sort(pt.data,pt.data+pt.n);
REP(i,1,pt.n) {
bool ac=false;
REP(j,0,pb.n){
Point x=(pt[i]+pt[i-1])*0.5; if(inbox((pt[i]+pt[i-1])*0.5,pb[j])) {
ac=true; break;
}
}
if(!ac) {goto _end;}
}
ans=min(ans,(p.dx-q.dx)*(p.dx-q.dx)+(p.dy-q.dy)*(p.dy-q.dy));
assert(0==q.id);
_end:
p=pp,q=qq,l=ll,w=ww,h=hh;
} int main() {
int cnt=0;
#ifdef sahdsg
freopen("in.txt","r",stdin);
#endif // sahdsg
while(~scanf("%d%d%d%d%d%d%d%d%d",&l,&w,&h,&p.x,&p.y,&p.z,&q.x,&q.y,&q.z)) {
work();
}
return 0;
}
UVA 503 Parallelepiped walk的更多相关文章
- UVa 10917 A Walk Through the Forest
A Walk Through the Forest Time Limit:1000MS Memory Limit:65536K Total Submit:48 Accepted:15 Descrip ...
- uva 10596 - Morning Walk
Problem H Morning Walk Time Limit 3 Seconds Kamal is a Motashota guy. He has got a new job in Chitta ...
- UVA 10196 Morning Walk(欧拉回路)
Problem H Morning Walk Time Limit 3 Seconds Kamalis a Motashotaguy. He has got a new job in Chittago ...
- Uva 10596 - Morning Walk 欧拉回路基础水题 并查集实现
题目给出图,要求判断不能一遍走完所有边,也就是无向图,题目分类是分欧拉回路,但其实只要判断度数就行了. 一开始以为只要判断度数就可以了,交了一发WA了.听别人说要先判断是否是联通图,于是用并查集并一起 ...
- UVa 10596 Moring Walk【欧拉回路】
题意:给出n个点,m条路,问能否走完m条路. 自己做的时候= =三下两下用并查集做了交,WA了一发-后来又WA了好几发--(而且也是判断了连通性的啊) 搜了题解= = 发现是这样的: 因为只要求走完所 ...
- 狗狗40题~ (Volume C)
A - Triangles 记忆化搜索呗.搜索以某三角形为顶的最大面积,注意边界情况. #include <stdio.h> #include <cstring> #inclu ...
- UVA - 10917 - Walk Through the Forest(最短路+记忆化搜索)
Problem UVA - 10917 - Walk Through the Forest Time Limit: 3000 mSec Problem Description Jimmy exp ...
- UVA 10917 Walk Through the Forest SPFA
uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&page=show_problem&problem= ...
- UVA 10917 Walk Through the Forest(dijkstra+DAG上的dp)
用新模板阿姨了一天,换成原来的一遍就ac了= = 题意很重要..最关键的一句话是说:若走A->B这条边,必然是d[B]<d[A],d[]数组保存的是各点到终点的最短路. 所以先做dij,由 ...
随机推荐
- Create a Report at Runtime 在运行时创建报表
In this lesson, you will learn how to create reports at runtime. A report showing a list of Tasks wi ...
- echarts 部分美化配置项使用记录
一.图表背景色配置项,如背景颜色渐变 https://www.echartsjs.com/zh/option.html#backgroundColor 二.图表中图形的颜色,如柱状图行采用渐变颜色显示 ...
- Go交叉编译(Go语言Mac/Linux/Windows下交叉编译)
Go交叉编译(Go语言Mac/Linux/Windows下交叉编译) 2019/11/21 Chenxin 在很多时候,由于开发的方便,会有这样的场景出现,使用Mac开发或使用Windows开发,需要 ...
- HAProxy实现网站高并发集群
简介:HAProxy提供高可用性.负载均衡以及基于TCP和HTTP应用的代理,支持虚拟主机,它是免费.快速并且可靠的一种解决方案.HAProxy特别适用于那些负载特大的web站点,这些站点通常又需要会 ...
- unittest---unittest简单介绍
说起python的单元测试,第一反应肯定就会是unittest,unittest作为python的标准库,很优秀,也被广泛的用到各个项目,但是你们知道吗?python的单元测试并不只有这一个,还有个p ...
- java8的捕获多个异常的一个写法
这是按intellij idea的提示知道的, 可以写成 catch(xxxException | yyyException | zzzException e){ } 这样的形式,对几个不同的异常使用 ...
- com.mysql.cj.exceptions.DataReadException: Zero date value prohibited
com.mysql.cj.exceptions.DataReadException: Zero date value prohibited at com.mysql.cj.result.SqlTime ...
- SpringData JPA实现增删改
一.创建实体类并自动生成数据库表 二.dao层继承JpaRepository 三.controller中增加操作 四.controller中删除操作 五.controller中修改操作
- 带有Spring Boot和MySQL的Docker:简介(Part 1)
通过优锐课java学习分享中,我们看一下带有Spring Boot和MySQL的Docker教程.非常实用,分享给大家参考学习. Docker是一种技术,开发人员或DevOps团队可以使用容器来构建, ...
- 关于Oracle数据库的rownum应用
它是Oracle系统顺序分配为从查询返回的行的编号,返回的第一行分配的是1,第二行是2,以此类推,这个伪字段可以用于限制查询返回的总行数,而且rownum不能以任何表的名称作为前缀. 如以下语句将无法 ...