ros2中创建一个python package
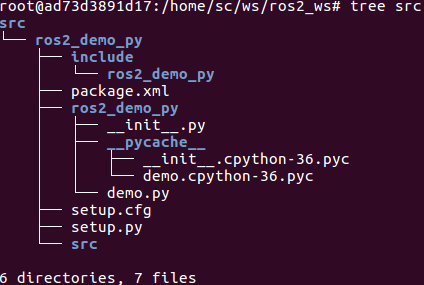
完整的python package的目录结构如下:
- source /opt/ros/dashing/setup.bash
- cd ros2_ws/src && ros2 pkg create <package_name>
- Delete CMakeLists.txt , create setup.py and setup.cfg and edit package.xml
setup.py内容参考:
from setuptools import setup
package_name = 'ros2_demo_py'
setup(
name=package_name,
version='0.7.0',
packages=[package_name],
install_requires=['setuptools'],
zip_safe=True,
author='You',
author_email='you@youremail.com',
maintainer='YourFirstname Lastname',
maintainer_email='your@youremail.com',
keywords=['ROS'],
classifiers=[
'Intended Audience :: Developers',
'License :: OSI Approved :: Apache Software License',
'Programming Language :: Python',
'Topic :: Software Development',
],
description='A simple ROS2 Python package',
license='Apache License, Version 2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'demo = ros2_demo_py.demo:main'
],
},
)
fbi warning!!!!!!!!!
'console_scripts': [
'demo = ros2_demo_py.demo:main'
],
告知ros2如何加载脚本.比如ros2 run ros2_demo_py demo实际上就是说要去执行ros2_demo_py/demo.py的main()函数. 更改setup.py后必须重新colcon build才会生效.
当我改成'console_scripts': [
'fuck_ = ros2_demo_py.what:main'
],时,相应的执行命令就变为ros2 run ros2_demo_py fuck_,执行的就是ros2_demo_py/what.py的main()函数
setup.cfg内容参考:
[develop]
script-dir=$base/lib/ros2_demo_py
[install]
install-scripts=$base/lib/ros2_demo_py
package.xml内容参考:
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format2.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="2">
<name>ros2_demo_py</name>
<version>0.7.3</version>
<description>A simple ROS2 Python package</description>
<maintainer email="sloretz@openrobotics.org">Shane Loretz</maintainer>
<license>Apache License 2.0</license>
<exec_depend>rclpy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- These test dependencies are optional
Their purpose is to make sure that the code passes the linters -->
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
- 创建python代码
demo.py
# Copyright 2016 Open Source Robotics Foundation, Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalPublisher(Node):
def __init__(self):
super().__init__('minimal_publisher')
self.publisher_ = self.create_publisher(String, 'topic')
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
msg = String()
msg.data = 'Hello World: %d' % self.i
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
self.i += 1
def main(args=None):
rclpy.init(args=args)
minimal_publisher = MinimalPublisher()
rclpy.spin(minimal_publisher)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
- 回到workspace目录,编译
user:~/ros2_ws$ colcon build --symlink-install
详细步骤参考:https://www.theconstructsim.com/ros2-tutorials-5-how-to-create-a-ros2-package-for-python-update/
ros2中创建一个python package的更多相关文章
- 创建一个目录info,并在目录中创建一个文件test.txt,把该文件的信息读取出来,并显示出来
/*4.创建一个目录info,并在目录中创建一个文件test.txt,把该文件的信息读取出来,并显示出来*/ #import <Foundation/Foundation.h>#defin ...
- Ionic 2 中创建一个照片倾斜浏览组件
内容简介 今天介绍一个新的UI元素,就是当我们改变设备的方向时,我们可以看到照片的不同部分,有一种身临其境的感觉,类似于360全景视图在移动设备上的应用. 倾斜照片浏览 Ionic 2 实例开发 新增 ...
- iOS9中如何在日历App中创建一个任意时间之前开始的提醒(三)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请多提意见,如果觉得不错请多多支持点赞.谢谢! hopy ;) 四.创建任意时间之前开始的提醒 现在我们找到了指定源中的指定日 ...
- 在C#/.NET应用程序开发中创建一个基于Topshelf的应用程序守护进程(服务)
本文首发于:码友网--一个专注.NET/.NET Core开发的编程爱好者社区. 文章目录 C#/.NET基于Topshelf创建Windows服务的系列文章目录: C#/.NET基于Topshelf ...
- Eclipse中创建一个新的SpringBoot项目
在Eclipse中创建一个新的spring Boot项目: 1. 首先在Eclipse中安装STS插件:在Eclipse主窗口中点击 Help -> Eclipse Marketplace... ...
- 在存放源程序的文件夹中建立一个子文件夹 myPackage。例如,在“D:\java”文件夹之中创建一个与包同名的子文件夹 myPackage(D:\java\myPackage)。在 myPackage 包中创建一个YMD类,该类具有计算今年的年份、可以输出一个带有年月日的字符串的功能。设计程序SY31.java,给定某人姓名和出生日期,计算该人年龄,并输出该人姓名、年龄、出生日期。程序使用YM
题目补充: 在存放源程序的文件夹中建立一个子文件夹 myPackage.例如,在“D:\java”文件夹之中创建一个与包同名的子文件夹 myPackage(D:\java\myPackage).在 m ...
- 父类是在子类创建对象时候 在子类中创建一个super内存空间
父类是在子类创建对象时候 在子类中创建一个super内存空间
- iOS9中怎样在日历App中创建一个随意时间之前開始的提醒(三)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 假设认为写的不好请多提意见,假设认为不错请多多支持点赞.谢谢! hopy ;) 四.创建随意时间之前開始的提醒 如今我们找到了指定源中的指定日 ...
- [Xcode 实际操作]九、实用进阶-(28)在iTunes Connect(苹果商店的管理后台)中创建一个新的新的APP
目录:[Swift]Xcode实际操作 本文将演示如何在iTunes Connect(苹果商店的管理后台)中创建一个新的新的APP. 首先要做的是打开浏览器,并进入[iTunesConnect网站], ...
随机推荐
- Maven使用教程一:Maven基础
使用Maven快速创建一个工程 为了加快速度,在setting.xml中加一段配置,用国内阿里云的镜像仓库可以去下载各种东西. <mirror> <id>nexus-aliyu ...
- 一个小工具帮你搞定实时监控Nginx服务器
Linux运维工程师的首要职责就是保证业务7 x 24小时稳定的运行,监控Web服务器对于查看网站上发生的情况至关重要.关注最多的便是日志变动,查看实时日志文件变动大家第一反应应该是'tail -f ...
- GIT实用操作指令(更新中)
提取多次提交的文件 git archive --format=zip HEAD `git diff --name-only 较早的提交ID 较晚的提交ID` > diff.zip
- 面试连环炮系列(三):synchronized怎么用的
synchronized怎么用的? 用过,synchronized是常用的并发控制关键字,简单的说就是访问加锁.它可以修饰静态方法或者一个类的class对象,这叫类锁:可以修饰普通方法或者代码块,这叫 ...
- CMake工程找不到相应的cuDNN版本的问题
(1) 去官网下载相应的版本,因为电脑之前安装的是 CUDA8. ,找跟 CUDA 版本兼容的 cuDNN 下载即可,我选择的是 cuDNN v7.(Deb) 和 cuDNN v7.1.4 Deve ...
- 对《Java核心技术卷一》读者的一些建议
<Java核心技术卷一>是唯一可以和<Java编程思想>媲美的一本 Java 入门书.单从技术的角度来看,前者更好一些.但上升到思想层面嘛,自然后者更好,两者的偏重点不同. 思 ...
- 大数据学习笔记——HBase使用bulkload导入数据
HBase使用bulkload批量导入数据 HBase可使用put命令向一张已经建好了的表中插入数据,然而,当遇到数据量非常大的情况,一条一条的进行插入效率将会大大降低,因此本篇博客将会整理提高批量导 ...
- 精通awk系列(4):awk用法入门
回到: Linux系列文章 Shell系列文章 Awk系列文章 awk用法入门 awk 'awk_program' a.txt awk示例: # 输出a.txt中的每一行 awk '{print $0 ...
- C# base
using System; using System.Collections.Generic; using System.Text; namespace 继承 { class Program { st ...
- Ligg.EasyWinApp-10300-Ligg.EasyWinForm:View的配置
View的配置文件, 路径如下: .\Applications\xxxx(Apllication)\Clients\Form\Functions\yyyy(Function)\ Views\zzzz ...