opencv —— HoughCircles 霍夫圆变换原理及圆检测
霍夫圆变换原理
霍夫圆变换的基本原理与霍夫线变换(https://www.cnblogs.com/bjxqmy/p/12331656.html)大体类似。
- 对直线来说,一条直线能由极径极角(r,θ)表示,而对于圆来说,我们需要三个参数:圆心(a,b),半径 r。

笛卡尔坐标系中圆的方程为:

化简便可得到:
- 对于(x0,y0),我们可以将通过这一点的所有圆统一定义为:
a = x0 - r·cosθ
b = y0 - r·sinθ
这就意味着每一组(a,b,r)代表一个通过点  的圆。
的圆。
对于一个给定点
,我们可以在三维直角坐标系中,绘出所有通过它的圆。最终我们将得到一条三维的曲线:

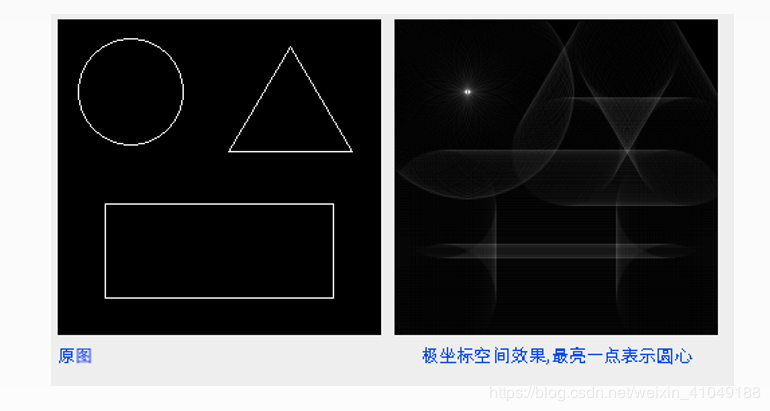
- 我们可以对图像中所有的点进行上述操作.。如果两个不同点进行上述操作后得到的曲线在空间 a - b - r 相交, 即它们有一组公共的(a,b,r),这就意味着它们在同一个圆上。
- 越多曲线交于一点,也就意味着这个交点表示的圆由更多的点组成。我们可以设置一个阈值,来决定多少条曲线交于一点我们才认为检测到了一个圆。
- 这就是霍夫圆变换要做的.。它追踪图像中每个点对应曲线间的交点.。如果交于一点的曲线的数量超过了阈值, 那么可以认为这个交点所代表的参数(a,b,r)在原图像中为一个圆。
以上是标准霍夫圆变换实现算法。问题是它的累加面(绘制三维曲线的空间)是一个三维的空间,意味着比霍夫线变换需要更多的计算消耗。OpenCV 霍夫圆变换对标准霍夫圆变换做了运算上的优化。它采用的是 “霍夫梯度法”。
霍夫梯度法的原理
- 估计圆心
- 把原图做一次 Canny 边缘检测,得到边缘检测的二值图。
- 对原始图像执行一次 Sobel 算子,计算出所有像素的邻域梯度值。
- 初始化圆心空间 N(a,b),令所有的 N(a,b)=0。
- 遍历 Canny 边缘二值图中的所有非零像素点,沿着梯度方向 ( 切线的垂直方向 )画线,将线段经过的所有累加器中的点 (a,b) 的 N(a,b)+=1。

- 统计排序 N(a,b),得到可能的圆心(N(a,b) 越大,越有可能是圆心)。
- 估计半径(针对某一个圆心 (a,b))
- 计算 Canny 图中所有非 0 点距离圆心的距离。
- 距离从小到大排序,根据阈值,选取合适的可能半径(比如 3 和 3.5 都被划为半径值 3 中)。
- 初始化半径空间 r, N(r)=0。
- 遍历 Canny 图中的非 0 点,N( 距离 )+=1。
- 统计得到可能的半径值(N(r) 越大,说明这个距离值出现次数越多,越有可能是半径值)。
霍夫梯度法缺点
- 在霍夫梯度法中,我们使用 Sobel 导数来计算局部梯度,那么随之而来的假设是,其可以视作等同于一条局部切线,并这个不是一个数值稳定的做法。在大多数情况下,这样做会得到正确的结果,但或许会在输出中产生一些噪声。
- 在边缘图像中的整个非0像素集被看做每个中心的候选部分。因此,如果把累加器的阈值设置偏低,算法将要消耗比较长的时间。
- 因为每一个中心只选择一个圆,如果有同心圆,就只能选择其中的一个。
- 因为中心是按照其关联的累加器值的升序排列的,并且如果新的中心过于接近之前已经接受的中心的话,就不会被保留下来。且当有许多同心圆或者是近似的同心圆时,霍夫梯度法的倾向是保留最大的一个圆。可以说这是一种比较极端的做法,因为在这里默认Sobel导数会产生噪声,若是对于无穷分辨率的平滑图像而言的话,这才是必须的。
霍夫圆变换:HoughCircles 函数
HoughCircles 函数可以利用霍夫变换算法检测出灰度图中的圆。它相比之前的 HoughLines 和HoughLinesP,比较明显的一个区别是不需要源图像是二值的,而 HoughLines 和HoughLinesP 都需要源图像是二值图像。
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1 = 100, double param2 = 100, int minRadius = 0, int maxRadius = 0);
- image,输入图像,即源图像,需要为 8 位的灰度单通道图像。
- circles,调用 HoughCircles 函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了 3 个元素的浮点矢量(x,y,radius)表示。
- method,使用的检测方法,目前 OpenCV 中就霍夫梯度法一种可以使用,标识符为 HOUGH_GRADIENT。
- dp,累加面分辨率(大小) = 原始图像分辨率(大小) × 1/dp。默认 dp = 1 时,两者分辨率相同。
- minDist,两个圆心之间的最小距离。若两圆心距离 < minDist,则认为是同一个圆。
- param1,Canny 边缘检测的高阈值,低阈值被自动置为高阈值的一半,默认为 100。
- param2,累加平面某点是否是圆心的判定阈值。它越大,能通过检测的圆就更接近完美的圆形,默认为 100。
- minRadius,圆半径的最小值。默认为 0。
- maxRadius,圆半径的最大值,默认为 0。
此函数可以很容易地检测出圆心,但是可能找不到合适地圆半径。我们可以通过 minRadius 和 maxRadius 两个参数指定最大和最小圆半径,来辅助圆检测的结果。或者可以直接忽略返回半径,让二者均为默认值,只用 HoughCircles 函数检测出圆心,用额外步骤进一步确定半径。
代码示例:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int hough_value = ;
Mat src, gray;
void hough_change(int, void*) {
vector<Vec3f>circles; //minDist 和 param2 数值的设定是关键
HoughCircles(gray, circles, HOUGH_GRADIENT, , , , hough_value, , );
Mat show = src.clone();
for (int i = ; i < circles.size(); i++) {
circle(show, Point(circles[i][], circles[i][]), circles[i][], Scalar(, , ), );
}
imshow("show", show);
}
int main() {
src = imread("C:/Users/齐明洋/Desktop/1.jpg");
GaussianBlur(src, src, Size(, ), , );
imshow("src", src);
cvtColor(src, gray, COLOR_BGR2GRAY);
namedWindow("show");
createTrackbar("hough_value", "show", &hough_value, , hough_change);
hough_change(, ); waitKey();
}
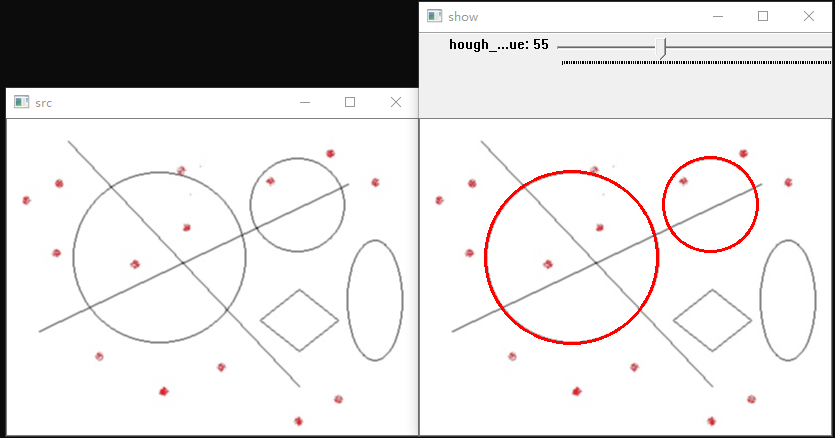
效果演示:
借鉴博客:https://www.cnblogs.com/yzl050819/p/7967526.html
https://www.cnblogs.com/lancer2015/p/6852488.html
opencv —— HoughCircles 霍夫圆变换原理及圆检测的更多相关文章
- 【OpenCV入门教程之十四】OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
http://blog.csdn.net/poem_qianmo/article/details/26977557 本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog ...
- 学习 opencv---(13)opencv霍夫变换:霍夫线变换,霍夫圆变换
在本篇文章中,我们将一起学习opencv中霍夫变换相关的知识点,以及了解opencv中实现霍夫变换的HoughLines,HoughLinesP函数的使用方法,实现霍夫圆变换的HoughCircles ...
- 【OpenCV新手教程之十四】OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/26977557 作者:毛星云(浅墨) ...
- OpenCV中的霍夫线变换和霍夫圆变换
一.霍夫线变换 霍夫线变换是OpenCv中一种寻找直线的方法,输入图像为边缘二值图. 原理: 一条直线在图像二维空间可由两个变量表示, 例如: 1.在 笛卡尔坐标系: 可由参数: (m,b) 斜率和截 ...
- opencv::霍夫圆变换
霍夫圆检测原理 从平面坐标到极坐标转换三个参数 假设平面坐标的任意一个圆上的点,转换到极坐标中: 处有最大值,霍夫变换正是利用这个原理实现圆的检测. cv::HoughCircles 因为霍夫圆检测对 ...
- opencv之霍夫曼变换
霍夫变换不仅可以找出图片中的直线,也可以找出圆,椭圆,三角形等等,只要你能定义出直线方程,圆形的方程等等. 不得不说,现在网上的各种博客质量真的不行,网上一堆文章,乱TM瞎写,误人子弟.本身自己就没有 ...
- opencv:霍夫直线检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- opencv:霍夫圆检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- Python+OpenCV图像处理(十五)—— 圆检测
简介: 1.霍夫圆变换的基本原理和霍夫线变换原理类似,只是点对应的二维极径.极角空间被三维的圆心和半径空间取代.在标准霍夫圆变换中,原图像的边缘图像的任意点对应的经过这个点的所有可能圆在三维空间用圆心 ...
随机推荐
- asp获取隐藏域的json 并解析
方法粗糙,适用度适中. var data2 = document.getElementById("hd_data02"); var val = data2.value; var o ...
- 『开源协议』Creative Commons Attribution 3.0 License . 协议的个人理解,并 转载分享 4000个 精美可商用小图标
为什么会研究 Creative Commons Attribution 3.0 License Creative Commons Attribution 3.0 License 简称 CC3,是 一种 ...
- .net core3.1 webapi + element-ui upload组件实现文件上传
首先,先看我个人的的项目结构. 这个webapi项目是专门用来做图片上传,其中分为两个控制器:单图片上传和多图片上传.而我接下来主要讲的还是单文件上传,对于多文件的上传,我暂且尚未研究成功. 其中pi ...
- [GPU高性能编程CUDA实战].(桑德斯).聂雪军等.扫描版-百度云分享
链接:https://pan.baidu.com/s/1NkkDiyRgmfmhm9d2g_GBKQ 提取码:3usj
- Lambda 表达式入门,看这篇就够了
说出来怕你们不相信,刚接到物业通知,疫情防控升级了,车辆只能出不能进,每户家庭每天可指派 1 名成员上街采购生活用品.这不是谣言,截个图自证清白,出自洛阳市湖北路街道处. 看来事态严峻,这样看似好心, ...
- .NET异步编程之APM模式
目录 1.AMP模式简介 2.使用BeginInvoke实现异步委托 3.原始线程怎么知道新线程已经运行完毕 4.使用AsyncCallback委托实现回调模式 5.源代码下载 shanzm-2020 ...
- Java并发读书笔记:线程安全与互斥同步
目录 导致线程不安全的原因 什么是线程安全 不可变 绝对线程安全 相对线程安全 线程兼容 线程对立 互斥同步实现线程安全 synchronized内置锁 锁即对象 是否要释放锁 实现原理 啥是重进入? ...
- python代码迷之错误(ModuleNotFoundError: No module named 'caffe.proto')
1.pandas.read_csv book[n]下的print(n) 总图片数是少一张的,print(n)发现也是少了一个序号 仔细查找后发现缺少99号,即最后一张图片没有被读取.print(m)时 ...
- Nginx:Nginx limit_req limit_conn限速
简介 Nginx是一个异步框架的Web服务器,也可以用作反向代理,负载均衡器和HTTP缓存,最常用的便是Web服务器.nginx对于预防一些攻击也是很有效的,例如CC攻击,爬虫,本文将介绍限制这些攻击 ...
- C语言寒假大作战04
问题 答案 这个作业属于那个课程 https://edu.cnblogs.c0m/campus/zswxy/CST2019-4 这个作业的要求在哪里 https://edu.cnblogs.com/c ...