快速理解YOLO目标检测
YOLO(You Only Look Once)论文
近些年,R-CNN等基于深度学习目标检测方法,大大提高了检测精度和检测速度。
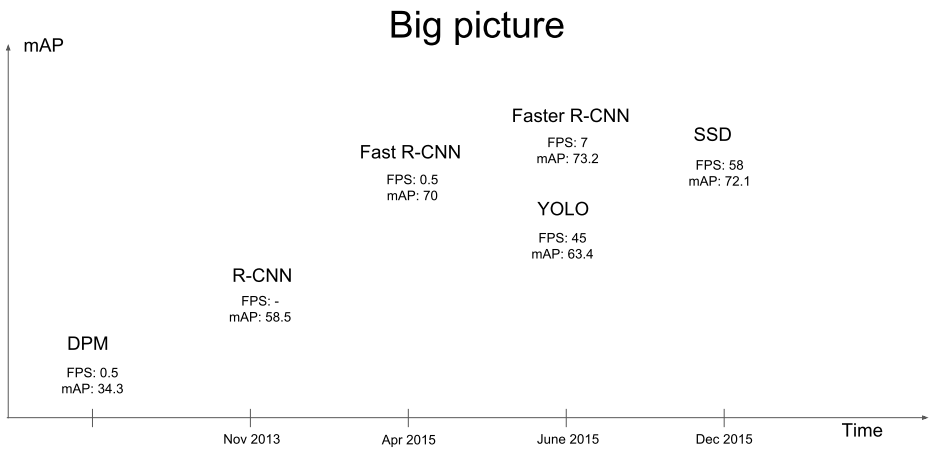
例如在Pascal VOC数据集上Faster R-CNN的mAP达到了73.2。而YOLO和SSD在达到较高的检测精度的同时,检测速度都在40FPS以上。这里主要对YOLO做简单介绍。

整个YOLO的网络结构如图,前面20层使用了改进的GoogleNet,得到14×14×1024的tensor,接下来经过4个卷积层分别进行3×3的卷积操作和1×1的降维操作,最后经过两个全连接层后输出为7×7×30的tensor。检测目标就能从7×7×30的tensor中得到。
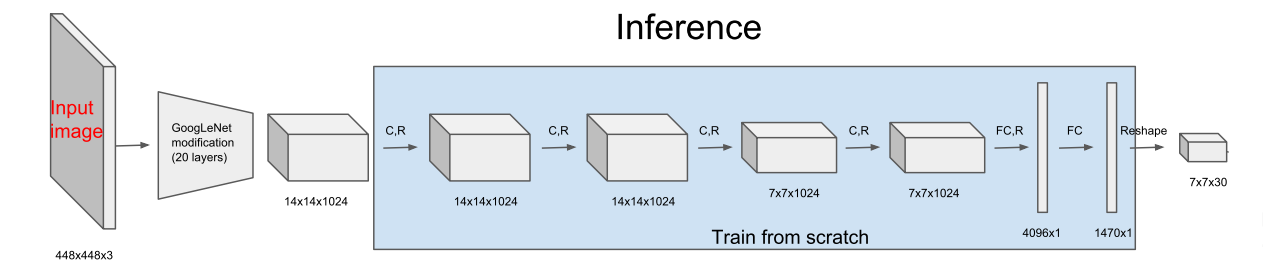
作者首先取出前面的20层网络,另外再加上一个average-pooling层和一个全连接层,在ImageNet训练集上进行图像分类任务的欲训练,top-5达到88%的准确度。然后将经过图像分类训练的前20层网络加上后面的网络层进行检测任务的训练。
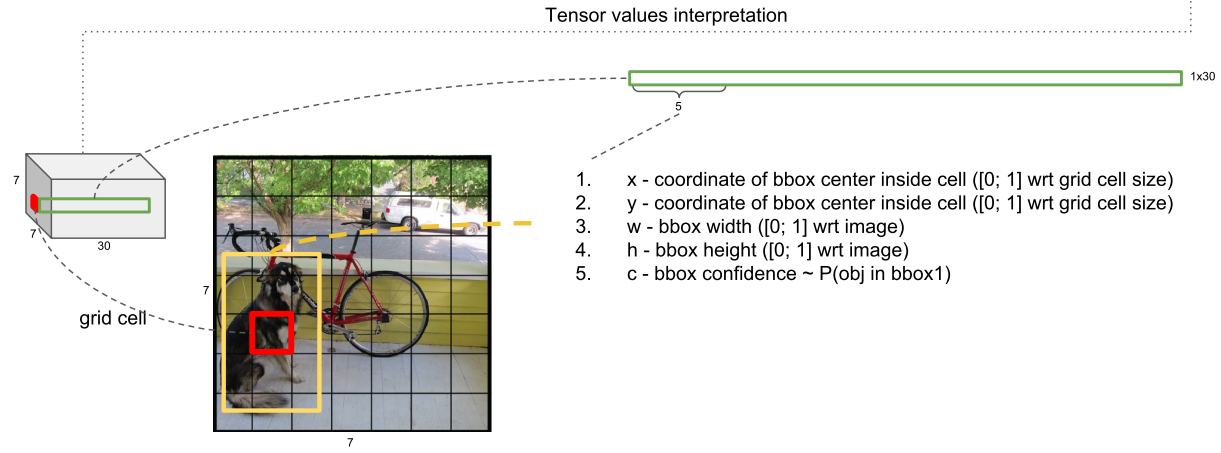
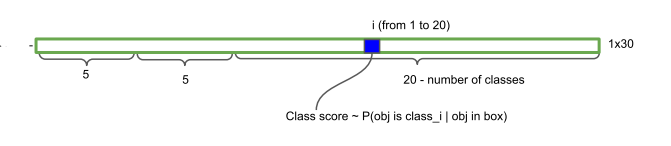
7×7×30 tensor的解释:
其实这里的7×7并不是将输入图像划分为7×7的网格,实际上指经过多个卷积层处理过后的特征map是7×7大小的,而且其中的每个cell是互相有重叠的,但是为了便于直观理解,直接将原始图像用7×7的网格进行划分。可以看到每个cell向量的前5维分别代表了一个检测框的x坐标,y坐标,宽度和高度,检测框中有目标物体的置信度(P(Object) ∗ IOU)。
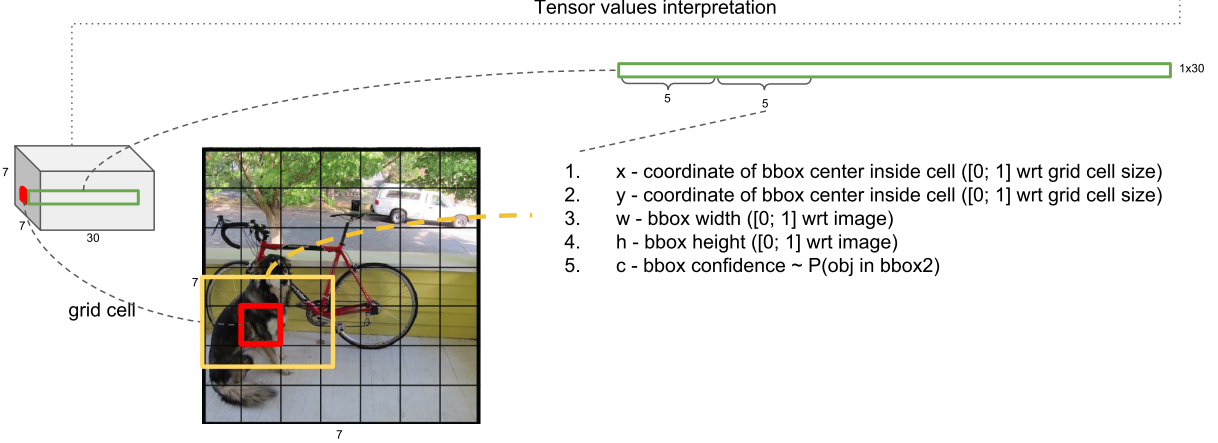
在论文中每个cell有两个检测框,6到10维向量代表了另外一个检测框的x坐标,y坐标,宽度和高度,检测框中有目标物体的置信度。

cell还剩下20维向量,代表这个cell中的物体属于20个类别的概率值。将cell两个检测框的置信度分别乘以20类别的概率值。
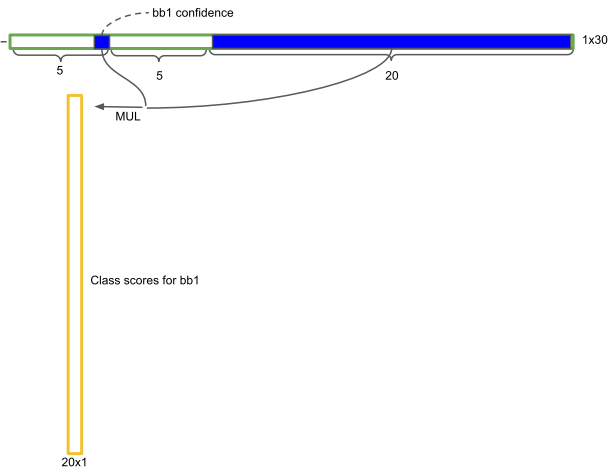

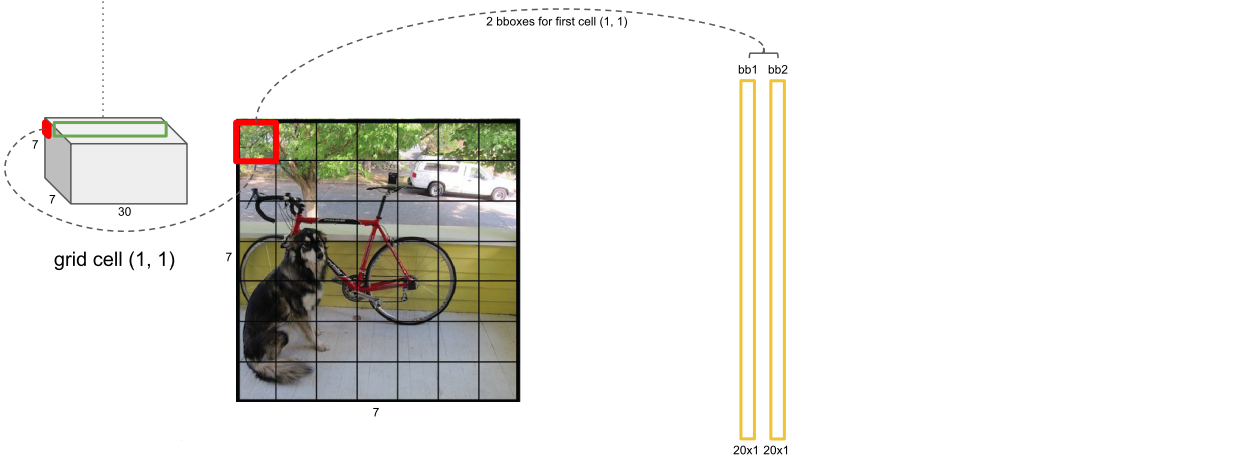
最后得到了7×7×2=98个检测框的20个类别的概率值。

接下来要从候选的检测框中找出最后的目标框:

对每个类别,进行阈值比较、降序排列、对有重叠的候选框使用非极大值抑制(NMS)操作。

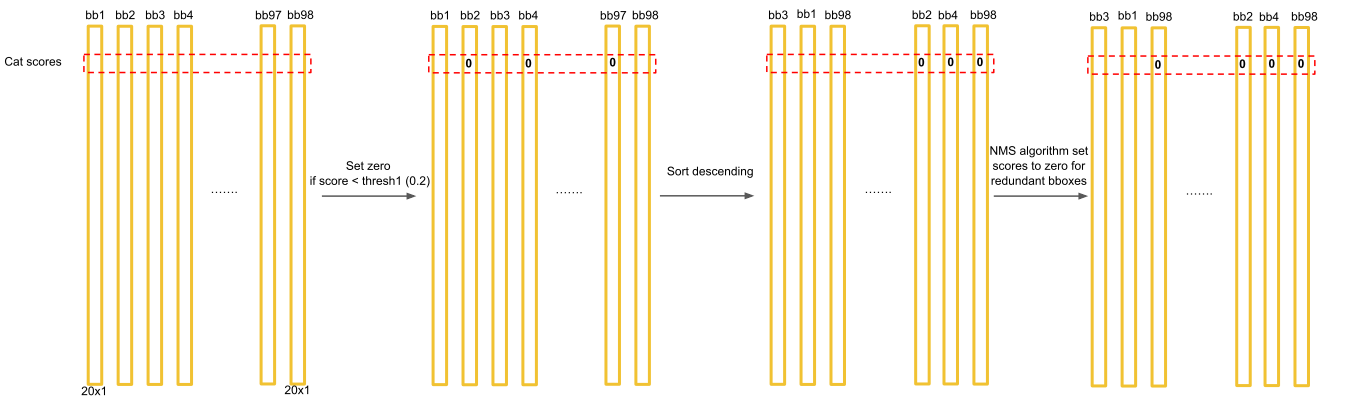
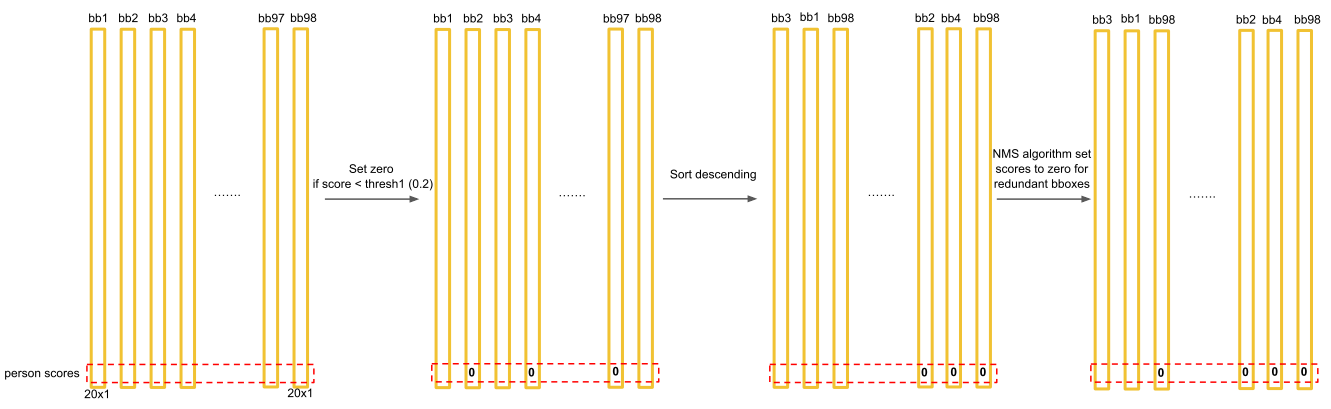
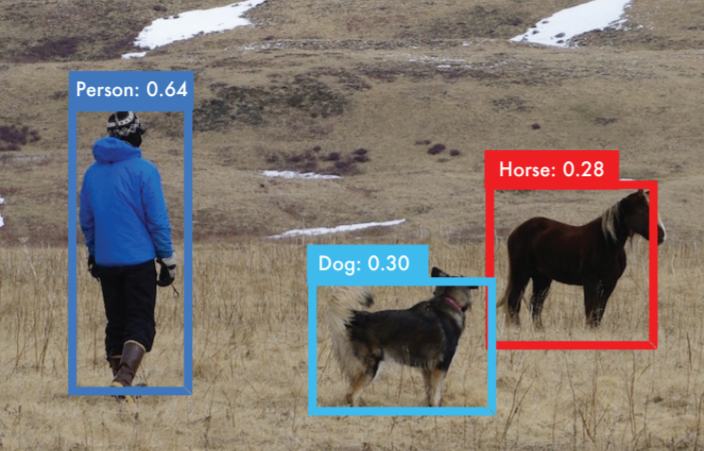
最后候选框的最终分数得到最终的类别和分数:

标出检测框:
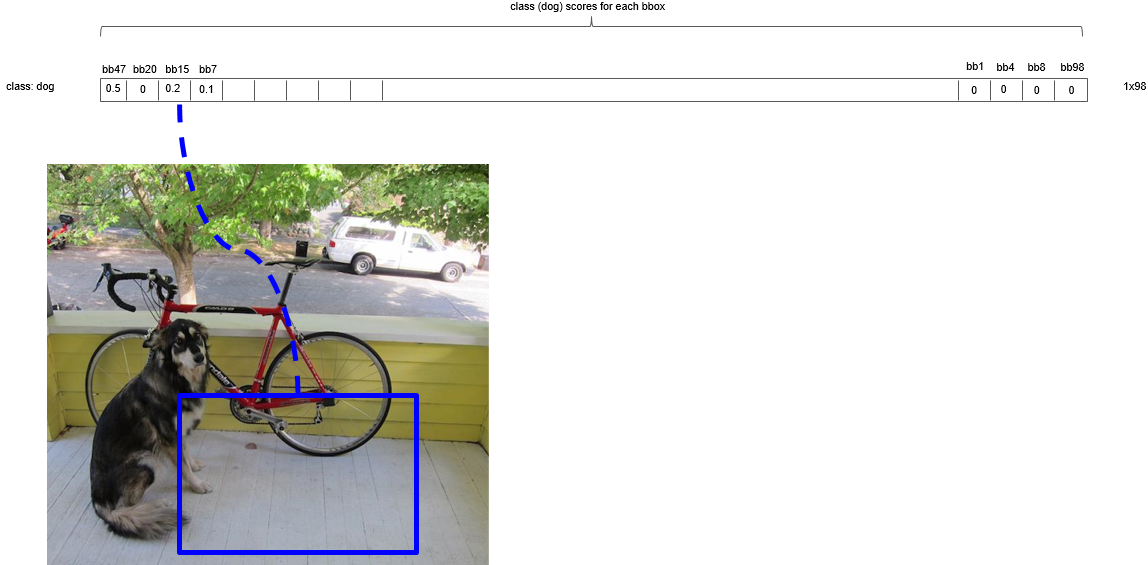
关于非极大值抑制(NMS):
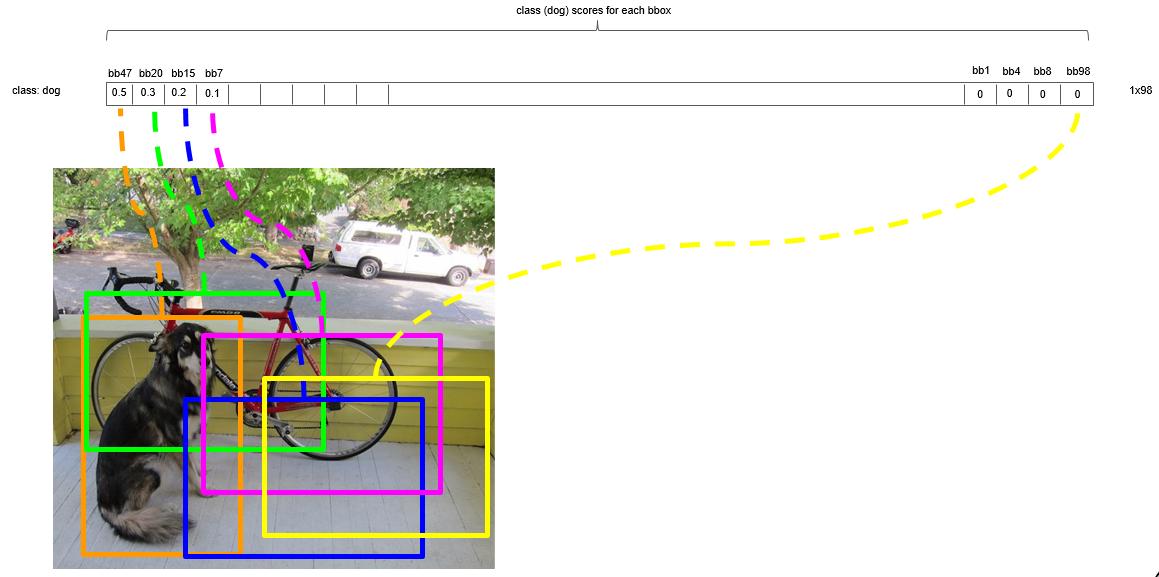
用bbox_max代表分数最大的候选框,将其与其他候选框bbox_cur进行比较,如果IoU(bbox_max,bbox_cur)>0.5,将候选框bbox_cur的分数置为0。
第一轮循环后,由于橙色框(bbox_max)和绿色框的重叠度大于0.5,所以将绿色候选框的分数置0。
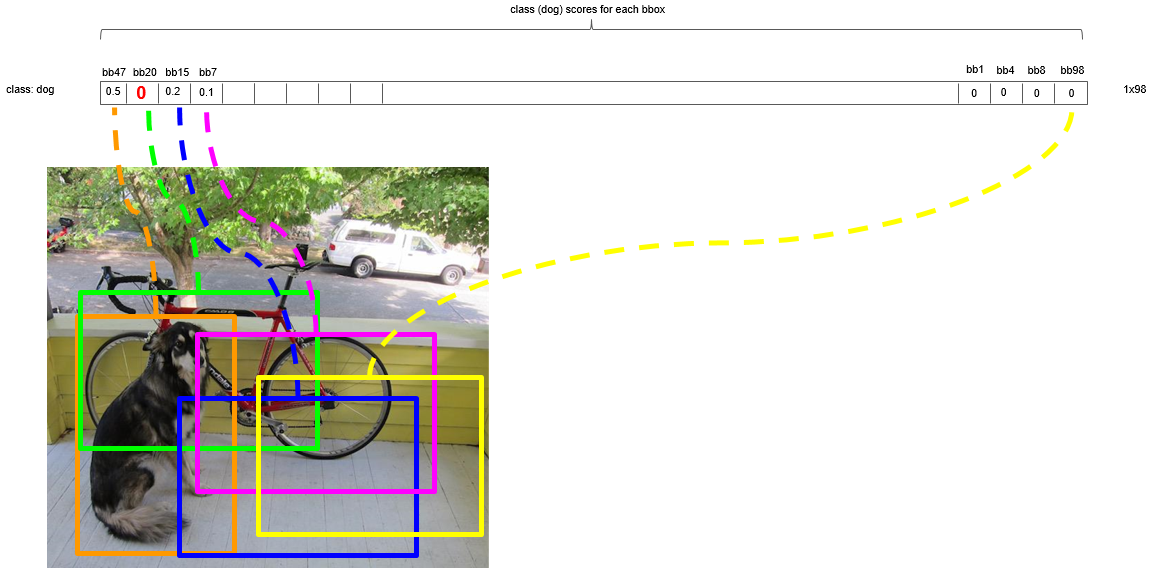
第二轮循环,将剩下的第二大分数的候选框设为bbox_max(图中的蓝色框)
同样的道理,由于蓝色框(bbox_max)和粉色框的重叠度大于0.5,所以将粉色候选框的分数置0。
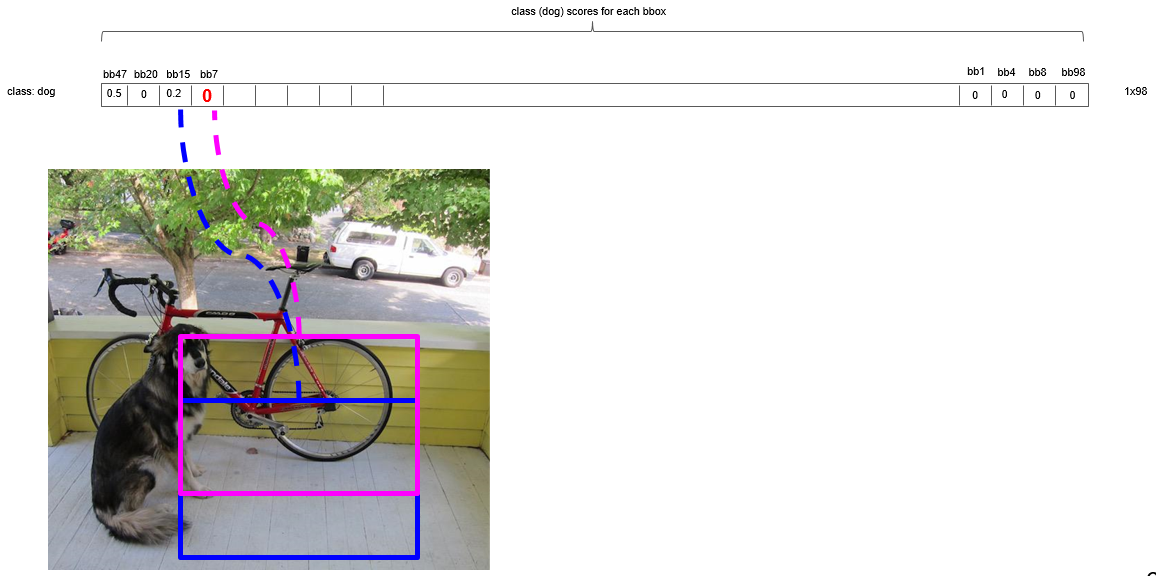
使用非极大值抑制循环结束后,很多情况下,都只有少数的几个候选框大于0。
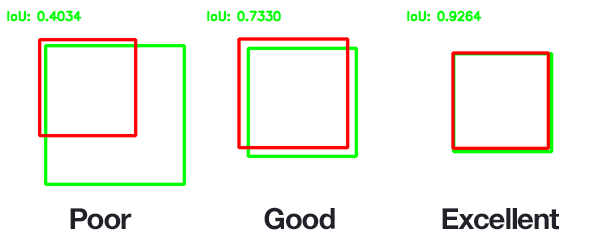
关于Intersect over Union (IoU)
关于Yolo v2
后来作者对YOLO进行了改进,公布了YOLO v2,论文
在精度(73.4 mAP on Pascal voc)和速度两个方面都有提高,并且提出了能够检测9000类物体的方法。
具体改进的地方有:
- 增加了batch normalization
- 在ImageNet上的预训练使用224×224和448x448两种尺寸的图像。
- 用Faster-RCNN类似的anchor boxes ,代替7×7grid-cell。
- 用kmeans方法得到box形状,代替人工选择box形状。
- 在ImageNet和MS-COCO数据集上进行训练。
- 提出了能够在分类数据集上训练检测任务的方法。
- 使用WordTree结合多种不同标签的数据。
参考:
deepsystems.io
快速理解YOLO目标检测的更多相关文章
- Python实现YOLO目标检测
作者:R语言和Python学堂 链接:https://www.jianshu.com/p/35cfc959b37c 1. 什么是目标检测? YOLO目标检测的一个示例 啥是目标检测? 拿上图 (用YO ...
- CNN之yolo目标检测算法笔记
本文并不是详细介绍yolo工作原理以及改进发展的文章,只用做作者本人回想与提纲. 1.yolo是什么 输入一张图片,输出图片中检测到的目标和位置(目标的边框) yolo名字含义:you only lo ...
- Keras+Yolo 目标检测
参考:https://www.cnblogs.com/tensorflownews/p/8922359.html Github:https://github.com/qqwweee/keras-yol ...
- TensorFlow + Keras 实战 YOLO v3 目标检测图文并茂教程
运行步骤 1.从 YOLO 官网下载 YOLOv3 权重 wget https://pjreddie.com/media/files/yolov3.weights 下载过程如图: 2.转换 Darkn ...
- 第三十六节,目标检测之yolo源码解析
在一个月前,我就已经介绍了yolo目标检测的原理,后来也把tensorflow实现代码仔细看了一遍.但是由于这个暑假事情比较大,就一直搁浅了下来,趁今天有时间,就把源码解析一下.关于yolo目标检测的 ...
- [炼丹术]YOLOv5目标检测学习总结
Yolov5目标检测训练模型学习总结 一.YOLOv5介绍 YOLOv5是一系列在 COCO 数据集上预训练的对象检测架构和模型,代表Ultralytics 对未来视觉 AI 方法的开源研究,结合了在 ...
- 理解 YOLO
YOLO: 1. YOLO的网络结构 YOLO v1 network (没看懂论文上的下图,看下面这个表一目了然了) 24层的卷积层,开始用前面20层来training, 图片是224x224的,然后 ...
- 使用Caffe完成图像目标检测 和 caffe 全卷积网络
一.[用Python学习Caffe]2. 使用Caffe完成图像目标检测 标签: pythoncaffe深度学习目标检测ssd 2017-06-22 22:08 207人阅读 评论(0) 收藏 举报 ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
随机推荐
- k8s(1.14.0)+etcd(3.3.10)+flanneld(0.10)
K8s(1.14) 几张比较不错的图 1.kubernetes 组件图 kubernetes 架构图 2.kubernetes 网络架构图 数据从源容器中发出后,经由所在主机的docker0虚拟网卡转 ...
- schedule of 2016-09-12~2016-09-18(Monday~Sunday)——1st semester of 2nd Grade
2016/9/12 Monday 1.send present to Teacher Wei&hu 2.make ppt for 1st database 2.0 meeting for al ...
- cometoj 茶颜悦色|扫描线+懒惰标记
传送门 题目描述 茶颜悦色也太好喝了!鸡尾酒在长沙的各种茶颜悦色的店铺中流连忘返.他发现长沙有炒鸡多的茶颜悦色店,走两步就能遇到一家. “方圆一公里能有十家茶颜悦色!”鸡尾酒感叹了起来. 于是他想到了 ...
- Linux学习_菜鸟教程_4
Linux远程登录 已经了解了登录流程,学会了用SecureCRT进行操作 Linux文件基本属性 Linux为保护系统安全,对不同的用户,开放不同的文件访问权限. 在linux中,我们可以使用ll或 ...
- 小白学 Python 爬虫(42):春节去哪里玩(系列终篇)
人生苦短,我用 Python 前文传送门: 小白学 Python 爬虫(1):开篇 小白学 Python 爬虫(2):前置准备(一)基本类库的安装 小白学 Python 爬虫(3):前置准备(二)Li ...
- Go 每日一库之 viper
简介 上一篇文章介绍 cobra 的时候提到了 viper,今天我们就来介绍一下这个库. viper 是一个配置解决方案,拥有丰富的特性: 支持 JSON/TOML/YAML/HCL/envfile/ ...
- 关于爬虫的日常复习(3)—— request库
- Jenkins-k8s-helm-harbor-githab-mysql-nfs微服务发布平台实战
基于 K8S 构建 Jenkins 微服务发布平台 实现汇总: 发布流程设计讲解 准备基础环境 K8s环境(部署Ingress Controller,CoreDNS,Calico/Flannel) 部 ...
- java小心机(4)| 继承与组合的爱恨情仇
在java中,有两种主要复用代码的方法:继承和组合. 继承,是OOP的一大特性,想必大家都非常熟悉了;组合,其实也很常见,只是不知道它的名字罢了. 继承 子类拥有父类的基本特性,需使用extend关键 ...
- python GUI测试自动化
#! /usr/bin/env python#coding=GB18030'''GUI测试自动化 语言:python模块:pywinauto环境:windows7中文.python-2.6_32bit ...