激光数据匹配(MATLAB Robotics System Toolbox)
正态分布变换算法是一个配准算法,它应用于三维点的统计模型,使用标准最优化技术来确定两个点云间的最优的匹配,因为其在配准过程中不利用对应点的特征计算和匹配,所以时间比其他方法快。算法细节可以参考:NDT(Normal Distributions Transform)算法原理与公式推导。MATLAB Robotics System Toolbox中的函数matchScans就是使用NDT算法来对两帧激光数据进行匹配,得到它们之间的相对变换关系。
matchScans函数的用法
matchScans函数用于匹配两帧激光雷达数据,输出两帧之间的姿态变换。用法主要有下面几种:
pose = matchScans(currScan,refScan) % finds the relative pose between a reference lidarScan and a current lidarScan object using the normal distributions transform (NDT).
pose = matchScans(currRanges,currAngles,refRanges,refAngles) % finds the relative pose between two laser scans specified as ranges and angles.
[pose,stats] = matchScans(___) % returns additional statistics about the scan match result using the previous input arguments.
输出参数:
- pose:Pose of current scan relative to the reference scan, returned as
[x y theta], where[x y]is the translation in meters andthetais the rotation in radians. - stats:Scan matching statistics, returned as a structure with the following fields:
Score— Numeric scalar representing the NDT score while performing scan matching. This score is an estimate of the likelihood that the transformed current scan matches the reference scan.Scoreis always nonnegative. Larger scores indicate a better match.
Hessian— 3-by-3 matrix representing the Hessian of the NDT cost function at the givenposesolution. The Hessian is used as an indicator of the uncertainty associated with the pose estimate.
其它输入参数:
- 'SolverAlgorithm' :Optimization algorithm, specified as either
'trust-region'(default)or'fminunc' - 'InitialPose':Initial guess of the current pose relative to the reference laser scan, specified as the comma-separated pair consisting of 'InitialPose' and an [x y theta] vector. [0 0 0] (default)
- 'MaxIterations':Maximum number of iterations, (400 default)
- 'ScoreTolerance':Lower bound on the change in NDT score, specified as the comma-separated pair consisting of
'ScoreTolerance'and a numeric scalar. The NDT score is stored in theScorefield of the outputstatsstructure. Between iterations, if the score changes by less than this tolerance, the algorithm converges to a solution. A smaller tolerance results in more accurate pose estimates, but requires a longer execution time. (1e-6 default) - 'CellSize':Length of a cell side in meters (1 default).
matchScansuses the cell size to discretize the space for the NDT algorithm. Tuning the cell size is important for proper use of the NDT algorithm. The optimal cell size depends on the input scans and the environment of your robot. Larger cell sizes can lead to less accurate matching with poorly sampled areas. Smaller cell sizes require more memory and less variation between subsequent scans. Sensor noise influences the algorithm with smaller cell sizes as well. Choosing a proper cell size depends on the scale of your environment and the input data.
- Match Lidar Scans
首先使用lidarScan函数创建一个对象来存储2D激光扫描信息(Creat object for storing 2-D lidar scan),主要有下面3种使用方式:
% creates a lidarScan object from the ranges and angles, that represent the data collected from a lidar sensor.
% The ranges and angles inputs are vectors of the same length and are set directly to the Ranges and Angles properties.
scan = lidarScan(ranges, angles)
scan = lidarScan(cart) % creates a lidarScan object using the input Cartesian coordinates as an n-by-2 matrix. The Cartesian property is set directly from this input.
scan = lidarScan(scanMsg) % creates a lidarScan object from a LaserScan ROS message object.
我们按照距离—角度方式创建一个参考数据:
refRanges = 5*ones(1,300);
refAngles = linspace(-pi/2,pi/2,300);
refScan = lidarScan(refRanges,refAngles);
然后使用transformScan将参考激光数据变换到另一个位置:
currScan = transformScan(refScan,[0.5 0.2 0]); % transforms the laser scan by using the specified relative pose
下面使用matchScans函数来计算这两帧数据之间的相对变换:
pose = matchScans(currScan,refScan);
结果为:pose = -0.4999 -0.2092 0.0185
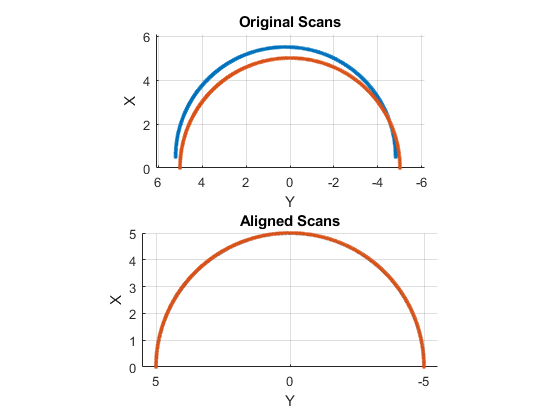
最后可以再使用transformScan根据计算出的pose对第二帧数据进行变换,看看与第一帧数据的重合程度怎么样:
currScan2 = transformScan(currScan,pose); subplot(2,1,1);
hold on
plot(currScan)
plot(refScan)
title('Original Scans')
hold off subplot(2,1,2);
hold on
plot(currScan2)
plot(refScan)
title('Aligned Scans')
xlim([0 5])
hold off
从下图可以看出两帧数据匹配的很好:
- Match Laser Scans
Specify a reference laser scan as ranges and angles:
refRanges = 5*ones(1,300);
refAngles = linspace(-pi/2,pi/2,300);
使用transformScan函数对参考数据进行变换,生成第二个激光数据:
[currRanges,currAngles] = transformScan(refRanges,refAngles,[0.5 0.2 0]);
调用matchScans函数时还可以指定其它参数,比如求解方法,初值,迭代次数等(Specify optional comma-separated pairs of Name,Value arguments. Name is the argument name and Value is the corresponding value. Name must appear inside single quotes (' '). You can specify several name and value pair arguments in any order asName1,Value1,...,NameN,ValueN.)
pose = matchScans(currRanges,currAngles,refRanges,refAngles,'SolverAlgorithm','fminunc');
pose = -0.5417 0.0165 -0.4096,可以看出误差比较大
通过指定初始值可以提高准确度(Improve the estimate by giving an initial pose estimate.)
pose = matchScans(currRanges,currAngles,refRanges,refAngles,'SolverAlgorithm','fminunc','InitialPose',[-0.4 -0.1 0]);
pose = -0.5100 -0.1834 -0.0330,比没有指定初值的结果要好很多
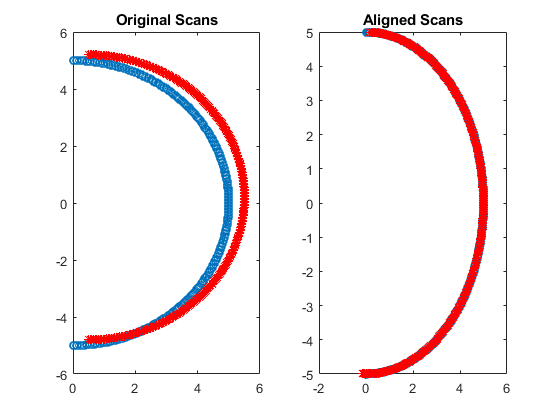
最后再根据计算出的结果将第2帧数据变换回去,进行对比:
[currRanges2,currAngles2] = transformScan(currRanges,currAngles,pose); [x1 y1] = pol2cart(refAngles,refRanges);
[x2 y2] = pol2cart(currAngles,currRanges);
[x3 y3] = pol2cart(currAngles2,currRanges2); subplot(1,2,1)
plot(x1,y1,'o',x2,y2,'*r')
title('Original Scans')
subplot(1,2,2)
plot(x1,y1,'o',x3,y3,'*r')
title('Aligned Scans')
Estimate Robot Pose with Scan Matching
The goal of scan matching is to find the relative pose (or transform) between the two robot positions where the scans were taken. The scans can be aligned based on the shapes of their overlapping features. To estimate this pose, NDT subdivides the laser scan into 2D cells and each cell is assigned a corresponding normal distribution. The distribution represents the probability of measuring a point in that cell. Once the probability density is calculated, an optimization method finds the relative pose between the current laser scan and the reference laser scan. To speed up the convergence of the method, an initial guess of the pose can be provided. Typically, robot odometry is used to supply the initial estimate.
If you apply scan matching to a sequence of scans, you can use it to recover a rough map of the environment that the robot traverses. Scan matching also plays a crucial role in other applications, such as position tracking and Simultaneous Localization and Mapping (SLAM).
我们可以通过匹配激光扫描数据来估计机器人位姿。下面看一个例子,将工作目录切换到Program Files\MATLAB\R2017b\toolbox\robotics\robotexamples\robotalgs下:
加载激光扫描数据文件:
filePath = fullfile(fileparts(mfilename('fullpath')), 'data', 'scanMatchingData.mat');
load(filePath);
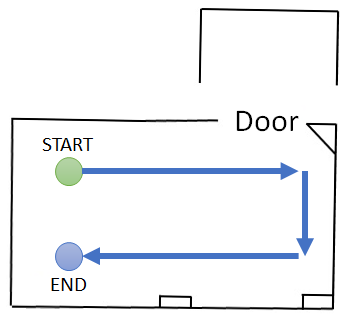
激光数据由室内移动机器人采集,机器人的大致移动路径如下图所示:
下面我们从laserMsg中挑选相隔比较近的两帧数据,画出来看看:
referenceScan = lidarScan(laserMsg{180});
currentScan = lidarScan(laserMsg{202});
currScanCart = currentScan.Cartesian;
refScanCart = referenceScan.Cartesian;
figure
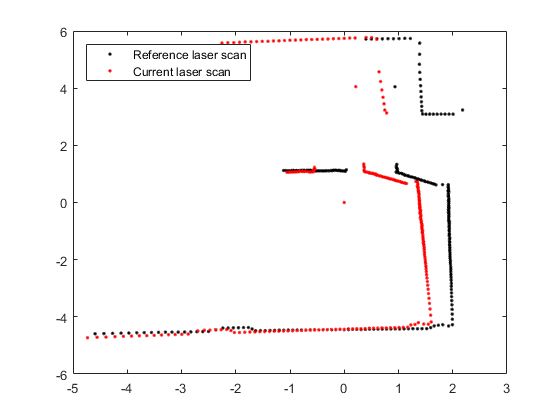
plot(refScanCart(:,1), refScanCart(:,2), 'k.');
hold on
plot(currScanCart(:,1), currScanCart(:,2), 'r.');
legend('Reference laser scan', 'Current laser scan', 'Location', 'NorthWest');
由于这两帧数据间隔比较近,所以它们之间会存在许多相同的特征。They should share common features by being close together in the sequence.
使用matchScans计算这两帧数据间的变换关系:
transform = matchScans(currentScan, referenceScan)
transform =
0.5348 -0.0065 -0.0336
为了验证相对变换的计算是否正确,可以用transformScan函数将currentScan变换回去查看两帧数据是否重合。This transformed laser scan can be used to visualize the result.
transScan = transformScan(currentScan, transform);
下面画出两帧激光数据图像:
figure
plot(refScanCart(:,1), refScanCart(:,2), 'k.');
hold on
transScanCart = transScan.Cartesian;
plot(transScanCart(:,1), transScanCart(:,2), 'r.');
legend('Reference laser scan', 'Transformed current laser scan', 'Location', 'NorthWest');
如果计算出的变换比较准确,那两帧图像会匹配的很好。If the scan matching was successful, the two scans should be well-aligned.

Build Occupancy Grid Map Using Iterative Scan Matching
如果我们对一些列连续的激光数据进行匹配,那么我们就能够从这些信息中粗略的建立环境地图(If you apply scan matching to a sequence of scans, you can use it to recover a rough map of the environment)。下面看一个例子,新建一个15m×15m的空地图,设置地图原点在[-7.5 -7.5]处:
map = robotics.OccupancyGrid(15, 15, 20);
map.GridLocationInWorld = [-7.5 -7.5]
map =
OccupancyGrid with properties:
OccupiedThreshold: 0.6500
FreeThreshold: 0.2000
ProbabilitySaturation: [0.0010 0.9990]
GridSize: [300 300]
Resolution: 20
XWorldLimits: [-7.5000 7.5000]
YWorldLimits: [-7.5000 7.5000]
GridLocationInWorld: [-7.5000 -7.5000]
每一帧激光扫描数据都对应着一个机器人的位姿,我们要通过激光数据之间的匹配关系来推算机器人的运动。以第一帧数据为参考位置,假设机器人位姿的初始值为[0 0 0]。预先分配一个矩阵poseList用于存储机器人运动路径上的位置和姿态:
numScans = numel(laserMsg);
initialPose = [0 0 0]; % Typically, robot odometry is used to supply the initial estimate.
poseList = zeros(numScans,3);
poseList(1,:) = initialPose;
transform = initialPose;
下面的代码循环处理所有激光数据,计算出相邻两帧之间的变换后通过exampleHelperComposeTransform函数计算出机器人相对于初始参考点的绝对位姿,并使用robotics.OccupancyGrid.insertRay函数来更新地图:
% Loop through all the scans and calculate the relative poses between them
for idx = 2:numScans
% Process the data in pairs.
referenceScan = lidarScan(laserMsg{idx-1});
currentScanMsg = laserMsg{idx};
currentScan = lidarScan(currentScanMsg); % Run scan matching. Note that the scan angles stay the same and do
% not have to be recomputed. To increase accuracy, set the maximum
% number of iterations to 500. Use the transform from the last
% iteration as the initial estimate.
[transform, stats] = matchScans(currentScan, referenceScan, ...
'MaxIterations', 500, 'InitialPose', transform); % The |Score| in the statistics structure is a good indication of the quality of the scan match.
if stats.Score / currentScan.Count < 1.0
disp(['Low scan match score for index ' num2str(idx) '. Score = ' num2str(stats.Score) '.']);
end % Maintain the list of robot poses.
absolutePose = exampleHelperComposeTransform(poseList(idx-1,:), transform);
poseList(idx,:) = absolutePose; % Integrate the current laser scan into the probabilistic occupancy grid.
insertRay(map, absolutePose, currentScan, double(currentScanMsg.RangeMax));
end
exampleHelperComposeTransform函数内容如下:
function composedTransform = exampleHelperComposeTransform(baseTransform, relativeTransform)
%exampleHelperComposeTransform Compose two transforms
% The RELATIVETRANSFORM is added to the BASETRANSFORM and the composed
% transform is returned in COMPOSEDTRANSFORM.
% BASETRANSFORM is the transform from laser scan 1 to world and
% RELATIVETRANSFORM is the transform from laser scan 2 to laser scan
% 1 (as returned by matchScans). % Concatenate the 4x4 homogeneous transform matrices for the base and
% relative transforms.
tform = pose2tform(baseTransform) * pose2tform(relativeTransform); % Extract the translational vector
trvec = tform2trvec(tform); % Extract the yaw angle from the resulting transform
eul = tform2eul(tform);
theta = eul(1); % The default order for Euler angle rotations is 'ZYX' % Composed transform has structure [x y theta(z-axis)]
composedTransform = [trvec(1:2) theta];
end
function tform = pose2tform(pose)
%pose2tform Convert [x y theta] pose into homogeneous transform
% TFORM is returned as a 4x4 matrix. x = pose(1);
y = pose(2);
theta = pose(3);
tform = trvec2tform([x y 0]) * eul2tform([theta 0 0]);
end
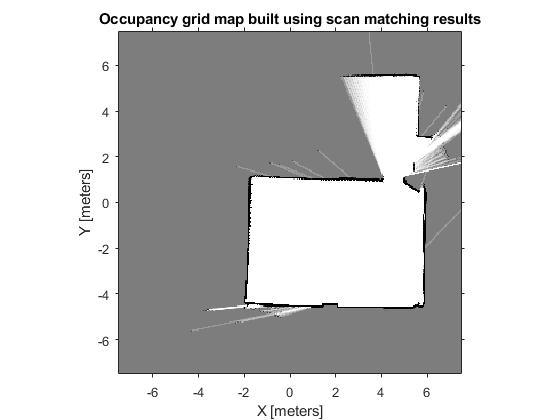
显示建好的地图:
figure
show(map);
title('Occupancy grid map built using scan matching results');
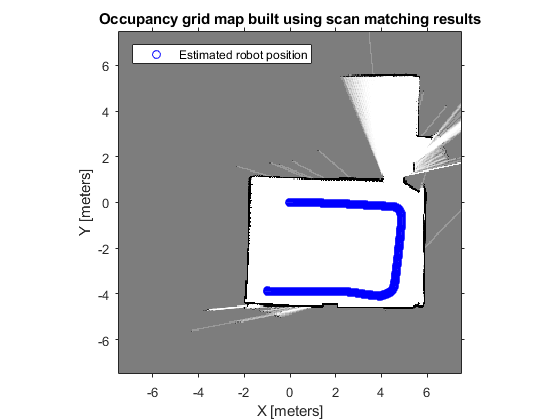
最后可以绘制出机器人在地图中的运动路径。 Plot the absolute robot poses that were calculated by the scan matching algorithm. This shows the path that the robot took through the map of the environment.
hold on
plot(poseList(:,1), poseList(:,2), 'bo', 'DisplayName', 'Estimated robot position');
参考:
Estimate Robot Pose with Scan Matching
Compose a Series of Laser Scans with Pose Changes
NDT(Normal Distributions Transform)算法原理与公式推导
使用正态分布变换(Normal Distributions Transform)进行点云配准
The Normal Distributions Transform: A New Approach to Laser Scan Matching
激光数据匹配(MATLAB Robotics System Toolbox)的更多相关文章
- 粒子滤波跟踪移动机器人(MATLAB Robotics System Toolbox)
MathWorks从MATLAB 2015a开始推出与ROS集成的Robotics System Toolbox(机器人系统工具箱),它为自主移动机器人的研发提供现成的算法和硬件接口. 粒子滤波基本流 ...
- Matlab Robotics Toolbox 仿真计算:Kinematics, Dynamics, Trajectory Generation
1. 理论知识 理论知识请参考: 机器人学导论++(原书第3版)_(美)HLHN+J.CRAIG著++贠超等译 机器人学课程讲义(丁烨) 机器人学课程讲义(赵言正) 2. Matlab Robotic ...
- ros学习笔记 - 深度传感器转换成激光数据(hector_slam)
前提条件:1,确保读者已经安装了kinect或者其他深度摄像头的驱动,如果未安装,可以直接在网盘下载:http://pan.baidu.com/s/1hqHB10w 提取密码:wrmn 利用深度相机仿 ...
- 激光相机数据融合(4)--KITTI数据集中matlab接口说明及扩展
KITTI数据集接口已经提供了matlab接口,本篇将说明详细说明其应用并与PCL进行对接.PCL为C++点云处理语言库,详情可见:http://pointclouds.org/ 程序可以从官网下载, ...
- 【转载】使用Pandas进行数据匹配
使用Pandas进行数据匹配 本文转载自:蓝鲸的网站分析笔记 原文链接:使用Pandas进行数据匹配 目录 merge()介绍 inner模式匹配 lefg模式匹配 right模式匹配 outer模式 ...
- 用TCP IP从C#实时传数据到Matlab
项目需要要从C#传实时数据到Matlab到数据分析,应该很多人也有这个需求,但是网上这方面的数据比较少,所以我把代码稍微贴下 首先是C#的部分 //介于我是同台电脑上传数据,直接用自己的IP建一个Se ...
- 如何将一个excel表格的数据匹配到另一个表中
我们在操作excel表的时,有时需要将一个excel表中的数据匹配到另一个表中,那么就需要用到VLOOKUP函数,VLOOKUP函数是Excel中的一个纵向查找函数,VLOOKUP是按列查找,最终返回 ...
- vlookup函数基本使用--如何将两个Excel表中的数据匹配;excel表中vlookup函数使用方法将一表引到另一表
vlookup函数基本使用--如何将两个Excel表中的数据匹配:excel表中vlookup函数使用方法将一表引到另一表 一.将几个学生的籍贯匹配出来‘ 二.使用查找与引用函数 vlookup 三. ...
- VLOOKUP函数将一个excel表格的数据匹配到另一个表中
sklearn实战-乳腺癌细胞数据挖掘(博主亲自录制视频) https://study.163.com/course/introduction.htm?courseId=1005269003& ...
随机推荐
- 安卓开发环境配置及HelloWorld
一:JAVA 下载地址:http://www.oracle.com/technetwork/java/javase/downloads/jdk8-downloads-2133151.html 1.1 ...
- NAT模式
NAT NAT模式中,就是让虚拟机借助NAT(网络地址转换)功能,通过宿主机器所在的网络来访问公网. NAT模式中,虚拟机的网卡和物理网卡的网络,不在同一个网络,虚拟机的网卡,是在vmware提供的一 ...
- MD5加密算法中的加盐值 ,和彩虹表攻击 防止彩虹表撞库
一.什么是彩虹表? 彩虹表(Rainbow Tables)就是一个庞大的.针对各种可能的字母组合预先计算好的哈希值的集合,不一定是针对MD5算法的,各种算法的都有,有了它可以快速的破解各类密码.越是复 ...
- 未能加载文件或程序集“Newtonsoft.Json”或它的某一个依赖项。找到的程序集清单定义与程序集引用不匹配。 (异常来自 HRESULT:0x80131040)
"/"应用程序中的服务器错误. 未能加载文件或程序集"Newtonsoft.Json"或它的某一个依赖项.找到的程序集清单定义与程序集引用不匹配. (异常来自 ...
- POJ训练计划2528_Mayor's posters(线段树/成段更新+离散化)
解题报告 id=2528">地址传送门 题意: 一些海报,覆盖上去后还能看到几张. 思路: 第一道离散化的题. 离散化的意思就是区间压缩然后映射. 给你这么几个区间[1,300000] ...
- go语言之进阶篇json解析到结构体
1.json解析到结构体 示例: package main import ( "encoding/json" "fmt" ) type IT struct { ...
- CListCtrl 之右键菜单
在使用CListCtrl时要为它添加一个右键菜单,步骤如下: 1. 响应CListCtrl的NM_RCLICK消息. 2. 添加一个菜单资源,在菜单资源中插入要添加到菜单内容. 一般存在两种方法: ...
- [leetcode]Median of Two Sorted Arrays @ Python
原题地址:https://oj.leetcode.com/problems/median-of-two-sorted-arrays/ 题意:There are two sorted arrays A ...
- 如何查看Isilon的节点的CPU的信息?
使用Isilon自带的命令 isi_hw_status 使用如下的命令 dmidecode --type processor 笔者只是想了解一下F800的CPU有多少个core.上面的命令都可以获得这 ...
- js 处理URL实用技巧
escape().encodeURI().encodeURIComponent()三种方法都能对一些影响URL完整性的特殊字符进行过滤. 但后两者是将字符串转换为UTF-8的方式来传输,解决了 ...