OpenCV学习(18) 细化算法(6)
本章我们在学习一下基于索引表的细化算法。
假设要处理的图像为二值图,前景值为1,背景值为0。
索引表细化算法使用下面的8邻域表示法:
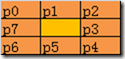
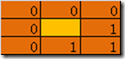
一个像素的8邻域,我们可以用8位二进制表示,比如下面的8邻域,表示为00111000=0x38=56
我们可以枚举出各种情况下,当前像素能否删除的表,该表大小为256。它的索引即为8邻域表示的值,表中存的值为0或1,0表示当前像素不能删除,1表示可以删除。deletemark[256]
比如下图第一个表示,索引值为0,它表示孤立点,不能删除,所以deletemark[0]=0,第二个表示索引值为17,它表示端点,也不能删除,所以deletemark[17]=0,第三个表示索引为21,删除的话会改变连通域数量,所以deletemark[21]=0,第四个表示索引值为96,此时可以删除,所以deletemark[96]=1。

最终我们会定义一张完整的表来表示当前像素能否删除。
索引表细化算法描述很简单。
1.找到轮廓,其值用4表示
2.查找值为4的轮廓,查找索引表判断能否删除,能删除的话把它置为0。
循环迭代1,2直到再也没有可以删除的点为止。
下面的算法的代码:
void gThin::cvidxThin1(cv::Mat& src, cv::Mat& dst)
{ if(src.type()!=CV_8UC1)
{
printf("只能处理二值或灰度图像\n");
return;
}
//非原地操作时候,copy src到dst
if(dst.data!=src.data)
{
src.copyTo(dst);
} // P0 P1 P2
// P7 P3
// P6 P5 P4
unsigned char deletemark[256] = {
0,0,0,0,0,0,0,1, 0,0,1,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,1,1,1,0,1,1,
0,0,0,0,0,0,0,0, 1,0,0,0,1,0,1,1,
0,0,0,0,0,0,0,0, 1,0,1,1,1,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0, 1,0,0,0,1,0,1,1,
1,0,0,0,0,0,0,0, 1,0,1,1,1,0,1,1,
0,0,1,1,0,0,1,1, 0,0,0,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,1,0,0,1,1,
1,1,0,1,0,0,0,1, 0,0,0,0,0,0,0,0,
1,1,0,1,0,0,0,1, 1,1,0,0,1,0,0,0,
0,1,1,1,0,0,1,1, 0,0,0,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,0,0,1,1,1,
1,1,1,1,0,0,1,1, 1,1,0,0,1,1,0,0,
1,1,1,1,0,0,1,1, 1,1,0,0,1,1,0,0
};//索引
int i, j;
int width, height;
//之所以减1,是方便处理8邻域,防止越界
width = src.cols -1;
height = src.rows -1;
int step = src.step;
int p0, p1, p2,p3,p4,p5,p6,p7;
uchar* img;
bool ifEnd;
bool border = false; //交换删除的次序,防止从一边细化
while(1)
{ border = !border;
img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =1; j<width; j++)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]==0) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; //如果sum等于0,则不是内部点,是轮廓点,设置其像素值为2
int sum;
sum = p0 & p1 & p2 & p3 & p4 & p5 & p6 & p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(sum==0)
{
dst.at<uchar>(i,j) = 4; //满足删除条件,设置当前像素为0
} }
}
//printf("\n");
//PrintMat(dst);
//执行删除操作
ifEnd = false; img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =1; j<width; j++)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]!=4) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; p1 = p1<<1;
p2 = p2<<2;
p3 = p3 <<3;
p4 = p4<<4;
p5 = p5<<5;
p6 = p6 <<6;
p7 = p7 << 7; //求的8邻域在索引表中的索引
int sum;
sum = p0 | p1 | p2 | p3 | p4 | p5 | p6 | p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(deletemark[sum] == 1)
{
dst.at<uchar>(i,j) = 0; //满足删除条件,设置当前像素为0
ifEnd = true;
} }
} //printf("\n");
//PrintMat(dst);
//printf("\n"); //已经没有可以细化的像素了,则退出迭代
if(!ifEnd) break;
}
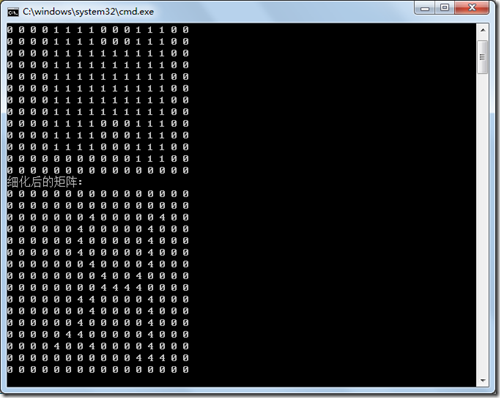
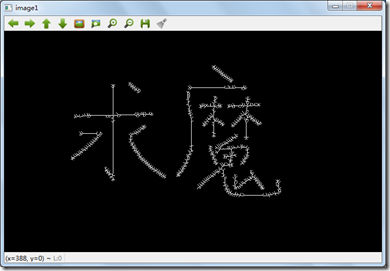
上面的算法可以看到细化后的轮廓偏右了,我们可以更改删除的循环条件,把循环拆分成三个,修改后的代码如下:
void gThin::cvidxThin(cv::Mat& src, cv::Mat& dst)
{ if(src.type()!=CV_8UC1)
{
printf("只能处理二值或灰度图像\n");
return;
}
//非原地操作时候,copy src到dst
if(dst.data!=src.data)
{
src.copyTo(dst);
} // P0 P1 P2
// P7 P3
// P6 P5 P4
unsigned char deletemark[256] = {
0,0,0,0,0,0,0,1, 0,0,1,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,1,1,1,0,1,1,
0,0,0,0,0,0,0,0, 1,0,0,0,1,0,1,1,
0,0,0,0,0,0,0,0, 1,0,1,1,1,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0, 0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0, 1,0,0,0,1,0,1,1,
1,0,0,0,0,0,0,0, 1,0,1,1,1,0,1,1,
0,0,1,1,0,0,1,1, 0,0,0,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,1,0,0,1,1,
1,1,0,1,0,0,0,1, 0,0,0,0,0,0,0,0,
1,1,0,1,0,0,0,1, 1,1,0,0,1,0,0,0,
0,1,1,1,0,0,1,1, 0,0,0,1,0,0,1,1,
0,0,0,0,0,0,0,0, 0,0,0,0,0,1,1,1,
1,1,1,1,0,0,1,1, 1,1,0,0,1,1,0,0,
1,1,1,1,0,0,1,1, 1,1,0,0,1,1,0,0
};//索引
int i, j;
int width, height;
//之所以减1,是方便处理8邻域,防止越界
width = src.cols -1;
height = src.rows -1;
int step = src.step;
int p0, p1, p2,p3,p4,p5,p6,p7;
uchar* img;
bool ifEnd;
bool border = false; //交换删除的次序,防止从一边细化
while(1)
{ border = !border;
img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =1; j<width; j++)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]==0) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; //如果sum等于0,则不是内部点,是轮廓点,设置其像素值为2
int sum;
sum = p0 & p1 & p2 & p3 & p4 & p5 & p6 & p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(sum==0)
{
dst.at<uchar>(i,j) = 4; //满足删除条件,设置当前像素为0
} }
}
//printf("\n");
//PrintMat(dst);
//执行删除操作
ifEnd = false; img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =1; j<width; j+=3)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]!=4) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; p1 = p1<<1;
p2 = p2<<2;
p3 = p3 <<3;
p4 = p4<<4;
p5 = p5<<5;
p6 = p6 <<6;
p7 = p7 << 7; //求的8邻域在索引表中的索引
int sum;
sum = p0 | p1 | p2 | p3 | p4 | p5 | p6 | p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(deletemark[sum] == 1)
{
dst.at<uchar>(i,j) = 0; //满足删除条件,设置当前像素为0
ifEnd = true;
} }
} img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =2; j<width; j+=3)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]!=4) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; p1 = p1<<1;
p2 = p2<<2;
p3 = p3 <<3;
p4 = p4<<4;
p5 = p5<<5;
p6 = p6 <<6;
p7 = p7 << 7; //求的8邻域在索引表中的索引
int sum;
sum = p0 | p1 | p2 | p3 | p4 | p5 | p6 | p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(deletemark[sum] == 1)
{
dst.at<uchar>(i,j) = 0; //满足删除条件,设置当前像素为0
ifEnd = true;
} }
} img = dst.data;
for(i = 1; i < height; i++)
{
img += step;
for(j =3; j<width; j+=3)
{
uchar* p = img + j;
//如果p点是背景点,继续循环
if(p[0]!=4) continue;
p0 = p[-step-1]>0?1:0;
p1 = p[-step]>0?1:0;
p2 = p[-step+1]>0?1:0;
p3 = p[1]>0?1:0;
p4 = p[step+1]>0?1:0;
p5 = p[step]>0?1:0;
p6 = p[step-1]>0?1:0;
p7 = p[-1]>0?1:0; p1 = p1<<1;
p2 = p2<<2;
p3 = p3 <<3;
p4 = p4<<4;
p5 = p5<<5;
p6 = p6 <<6;
p7 = p7 << 7; //求的8邻域在索引表中的索引
int sum;
sum = p0 | p1 | p2 | p3 | p4 | p5 | p6 | p7; //判断是否是邻接点或孤立点,0,1分别对于那个孤立点和端点
if(deletemark[sum] == 1)
{
dst.at<uchar>(i,j) = 0; //满足删除条件,设置当前像素为0
ifEnd = true;
} }
} //printf("\n");
//PrintMat(dst);
//printf("\n"); //已经没有可以细化的像素了,则退出迭代
if(!ifEnd) break;
} }
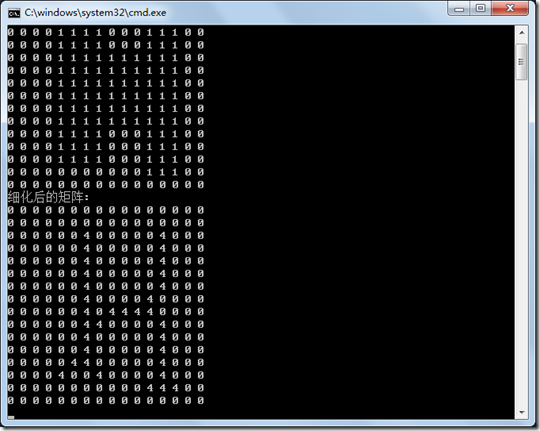
修改后的结果:
程序源代码:工程FirstOpenCV11
OpenCV学习(18) 细化算法(6)的更多相关文章
- OpenCV学习(16) 细化算法(4)
本章我们学习Rosenfeld细化算法,参考资料:http://yunpan.cn/QGRjHbkLBzCrn 在开始学习算法之前,我们先看下连通分量,以及4连通性,8连通性的概念: http://w ...
- OpenCV学习(15) 细化算法(3)
本章我们学习一下Hilditch算法的基本原理,从网上找资料的时候,竟然发现两个有很大差别的算法描述,而且都叫Hilditch算法.不知道那一个才是正宗的,两个算法实现的效果接近,第一种算 ...
- OpenCV学习(17) 细化算法(5)
本章我们看下Pavlidis细化算法,参考资料http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/con ...
- OpenCV学习(14) 细化算法(2)
前面一篇教程中,我们实现了Zhang的快速并行细化算法,从算法原理上,我们可以知道,算法是基于像素8邻域的形状来决定是否删除当前像素.还有很多与此算法相似的细化算法,只是判断的条件不一样. ...
- OpenCV学习(13) 细化算法(1)
程序编码参考经典的细化或者骨架算法文章: T. Y. Zhang and C. Y. Suen, "A fast parallel algorithm for thinning digita ...
- OpenCV学习(19) 细化算法(7)
最后再来看一种通过形态学腐蚀和开操作得到骨架的方法.http://felix.abecassis.me/2011/09/opencv-morphological-skeleton/ 代码非常简单: v ...
- c++opencv中线条细化算法
要达到的效果就是将线条尽量细化成单像素,按照论文上的Hilditch算法试了一下,发现效果不好,于是自己尝试着写了一下细化的算法,基本原理就是从上下左右四个方向向内收缩. 1.先是根据图片中的原则确定 ...
- OpenCV学习(9) 分水岭算法(3)
本教程我学习一下opencv中分水岭算法的具体实现方式. 原始图像和Mark图像,它们的大小都是32*32,分水岭算法的结果是得到两个连通域的轮廓图. 原始图像:(原始图像必须是3通道图像) Mark ...
- OpenCV学习(21) Grabcut算法详解
grab cut算法是graph cut算法的改进.在理解grab cut算之前,应该学习一下graph cut算法的概念及实现方式. 我搜集了一些graph cut资料:http://yunpan. ...
随机推荐
- PHP接入微信H5支付
开发前配置 进行代码接入前,需在微信后台填写授权回调域名,此域名必须经过ICP备案 开发主要流程 用户下单时选择微信支付 商户进行业务逻辑处理并调用微信统一下单接口,微信H5交易类型为:trade_t ...
- UVA - 10815 - Andy's First Dictionary STL
Andy, 8, has a dream - he wants to produce his very own dictionary. This is not an easy task for him ...
- ASP.NET MVC 提高运行速度的几种性能优化方法
主要介绍ASP.NETMVC 应用提速的六种方法,因为没有人喜欢等待,所以介绍几种常用的优化方法. 大家可能会遇到排队等待,遇到红灯要等待,开个网页要等待,等等等. 理所当然,没有人喜欢等待网页慢吞吞 ...
- [ 原创 ] Java基础8--什么叫做重载
重载是在同一个类中,有多个方法名相同,参数列表不同(参数个数不同,参数类型不同),与方法的返回值无关,与权限修饰符无关,B中的参数列表和题目的方法完全一样了.
- 第一个ASP.NET MVC应用程序
首先打开vs2015 文件->新建->项目 选择模版选empty,下面[为下项添加文件夹和核心引用]勾选mvc 点击确定就好
- 【51Nod 1222】最小公倍数计数
http://www.51nod.com/onlineJudge/questionCode.html#!problemId=1222 求\([a,b]\)中的个数转化为求\([1,b]\)中的个数减去 ...
- CodeForces1082G Petya and Graph 最小割
网络流裸题 \(s\)向点连边\((s, i, a[i])\) 给每个边建一个点 边\((u, v, w)\)抽象成\((u, E, inf)\)和\((v, E, inf)\)以及边\((E, t, ...
- [LOJ2542][PKUWC2018]随机游走(MinMax容斥+树形DP)
MinMax容斥将问题转化为求x到S中任意点的最小时间. 树形DP,直接求概率比较困难,考虑只求系数.最后由于x节点作为树根无父亲,所以求出的第二个系数就是答案. https://blog.csdn. ...
- 命令神器:lsof 常用
lsof -i 显示所有网络连接lsof -i 6 获取IPv6信息lsof -itcp 显示tcp连接lsof -i:80 显示指定端口信息lsof -i@172.12.5.6 显示指定ip连接ls ...
- BZOJ5217: [Lydsy2017省队十连测]航海舰队 FFT
被FFT的空间卡了半天 后来发现根本不用开那么大... 首先可以把包含舰艇的那个小矩形找出来 将它一行一行连接成一个串T 其中舰艇位置为1其他位置为0 将大矩形也连成串S 其中礁石为1其他为0 两个串 ...