【项目实战】自备相机+IMU跑通Vins-Mono记录
前言
初次接触SLAM,公司要求用自己的设备来跑通vinsmono这个程序,虽然已经跑通了别人的数据包,但是真正自己上手来运行这个程序,发现真的是困难重重,特意在此记载下来整个过程,以供大家参考。
我这边使用的设备如下:
- 相机:公司给的杰锐微通的一款HF890
- IMU: 公司给的LPMS-IG1
- 系统:ubuntu18.04
- 电脑:暗夜精灵5
相机标定
启动相机、安装标定软件
首先我们要对手上的摄像头进行标定,这个就无关无牌子了,除非你是D345i这样的大牌子。
首先usb接上电脑,我们使用官方的 uvc_camera 包读取相机。
rosdep install camera_calibration
为了单目相机通过ROS发布图像。让我们列出主题以检查图像是否已发布:
rostopic list
然后开始注意了,这里是我踩的第一个坑!一定要看自己的rostopic list对应的话题是什么,不然后面指令是找不到的
/相机名称/info
/相机名称/image_raw
然后运行
###对相机进行标定
rosrun camera_calibration cameracalibrator.py --size 8x6(填你标定布的大小) --square 0.108(填你标定布格子 的长度,以米为单位) image:=/camera/image_raw(注意,这里要填你的相机话题!) camera(这里也是!):=/camera
需要注意我这里使用的标定板为 GP400-12x9 的,所以这里的 size 为 11x8, (为什么不是 12x9 参考官网链接),square 为 0.03
然后就开始标定了,如果你的参数输入没有问题的话,是可以读到你的标定板每个方格的小点的
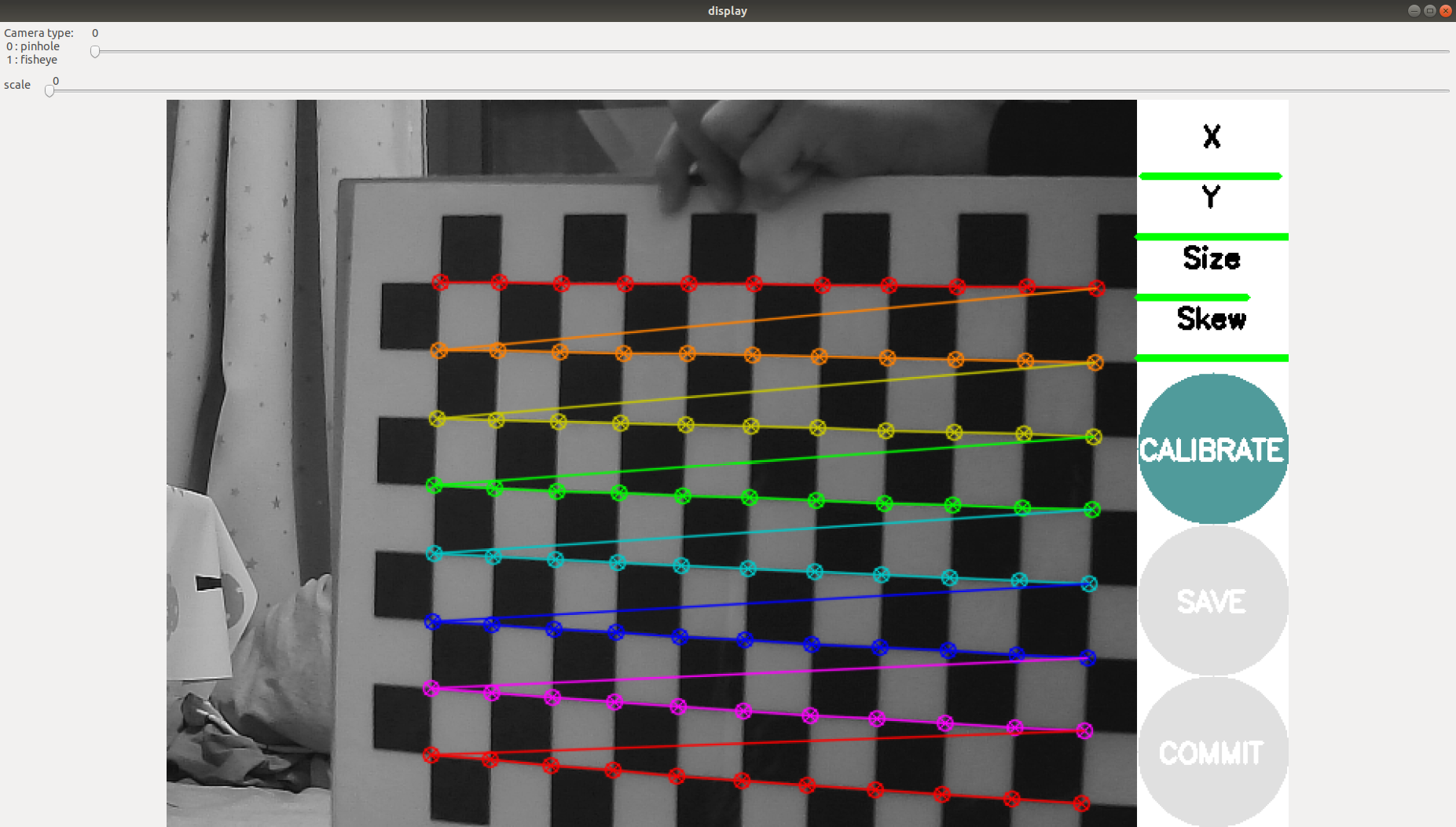
具体标定方法就是拿着标定板放在相机视野内,标定板上出现彩色线条则为有效图像,反之无效,需要调整标定板位置。
分别在左右移动(X),直到标定界面上X下方的精度条为绿色,然后依次在上下(Y),远近(Size),倾斜(Skew)方向移动,移动过程尽量缓慢,避免大幅度的移动使相机成像产生拖影。持续移动直到所有的进度条都为绿色
当所有进度条都变成绿色后,CALIBRATE按钮由灰色变成深绿色,点击CALIBRATE,点击一下后,界面会卡住,此时不要做任何操作,直到运行标定程序的终端输出标定的结果,大概是这样的。
这个时候你可能会卡住,就是程序突然无响应了,我找了好久才找到一个办法,就是
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 --approximate=0.01 right:=/my_stereo/right/image_raw left:=/my_stereo/left/image_raw right_camera:=/my_stereo/right left_camera:=/my_stereo/left
加入了一行这个--approximate=0.01参数,我也不知道是不是这个东西起的作用,毕竟我还重启了一遍电脑
至此相机就标定完毕了
点击标定界面的SAVE按钮,标定结果保存在/tmp/calibrationdata.tar.gz这个压缩包中,打开标定结果的压缩包,里面大概是这些内容,最后一个yaml文件就是我们需要的标定结果。
IMU标定
安装imu_utils
这是最让我裂开的一个地方,因为他所需要的code_utils这个包和我用的传感器驱动下载都花了好大力气才搞好
1: 安装ceres库
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev
sudo apt-get install libgoogle-glog-dev libgtest-dev
下载编译 ceres-solver
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver
mkdir build
cd build
cmake ..
make
sudo make install
- 安装 code_utils
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
catkin_make
然后
sudo apt-get install libdw-dev
cd src
git clone https://github.com/gaowenliang/code_utils.git
这里有两个大坑
首先是要把src/code_utils/src/sumpixel_test.cpp中的#include "backward.hpp"改为#include “code_utils/backward.hpp”
然后我照着这个做了,catkin_make给我报错
In file included from /home/lugendary/kalibr_workspace/src/code_utils/src/cv_utils/dlt/dlt.cpp:1:0:
/home/lugendary/kalibr_workspace/src/code_utils/include/code_utils/cv_utils/dlt/dlt.h:15:21: error: ‘vector’ in namespace ‘std’ does not name a template type
DLT( const std::vector< Eigen::Vector3d >& pts_2, const std::vector< Eigen::Vector3d >& pts_3 );
一大串,我找遍全网也没有老哥告诉我解决办法,最后我打开了clion里面,在哪个文件里用纠错功能一键引用了缺少的库,解决问题,编译成功
cd ..
catkin_make
这个时候就可以在src下面安装imu_utils
cd kalibr_workspace/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
标定的工具搞完了,现在就要启动我们的IMU了
启动IMU
首先建立一个工作空间openzen_ws/src
mkdir -p openzen_ws/src
然后就是坑了,我按照要求进入工作空间,通过git获取安装包
cd openzen/src
git clone --recurse-submodules https://bitbucket.org/lpresearch/openzenros.git
但是openzenros文件里面的东西我死活下载不到,不管是zip下载还是克隆都没办法
最后我直接在wiki上面
apt install ros-melodic-openzen-sensor
安装了,然后IMU通过USB 和电脑连接,给串口权限(你的传感器叫什么你可以通过dev下面的文件中,插拔一下imu看tty那个文件变换了)
sudo chmod 777 /dev/ttyUSB0
在新的命令行窗口运行roscore后,在工作空间下运行驱动
source devel/setup.bash
rosrun openzen_sensor openzen_sensor_node
发布的话题节点为/imu/data,通过以下命令查看话题消息
rostopic echo /imu/data
如果一直出数据,就没问题了
录制IMU数据集
接着录制IMU数据集
静止情况下采集IMU的数据,并录制为ROS包,我采集的时间为2小时20分钟。
rosbag record /imu/data -O imu_xsens.bag
标定IMU
修改你之前下载标定工具那个东西的src/imu_utils/launch/文件夹下的A3.launch文件中的话题,改成名为/imu/data
运行标定工具
cd 你的标定工具的工作空间
source devel/setup.bash
roslaunch imu_utils A3.launch
然后倍速回放bag包,我的bag包名字直接搜索.bag定位到文件夹然后找到的
rosbag play -r 200 imu.bag
标定完退出,搜索A3_imu,就找到yaml在哪里了,这里我用的是xsens_imu_param.yaml
配置YAML文件
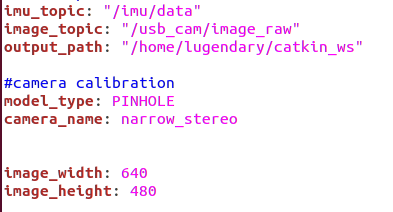
然后接下来就是所使用我们的标定数据了,首先要改vins代码中的yaml数据,为了防止填写格式出问题导致bug,我就直接在config下面的realsense里面修改realsense_color_config.yaml文件了
填写相机标定参数
启动相机和IMU节点,用rostopic来查看话题,
先修改这些参数
然后把相机的yaml文件里面的相机的内参矩阵

按照
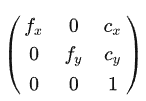
填入projection_parameters:这个参数
然后把

填入distortion_parameters。
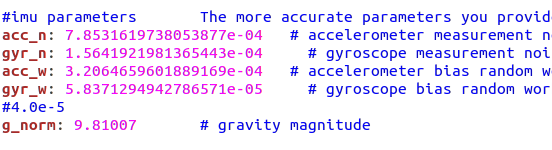
填写IMU标定参数
然后打开 IMU的标定yaml,
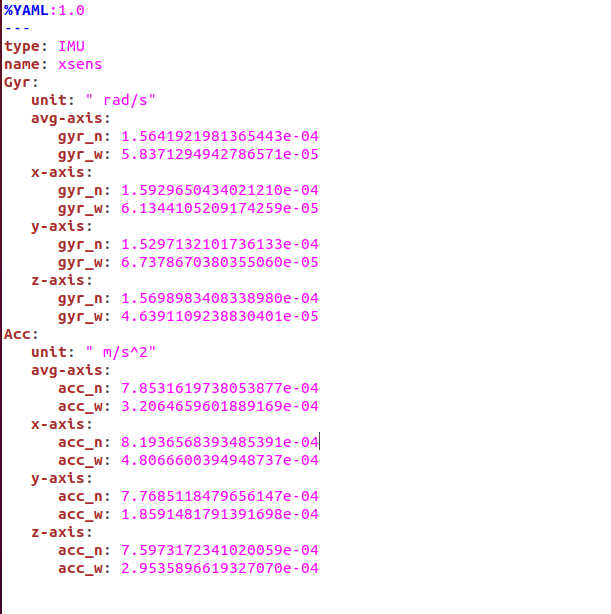
把所有的avg项目按需填入
其他参数的填写
至于这个yaml其他的参数填什么就看你自己的需求了,可以配合这篇文章学习修改
https://zhuanlan.zhihu.com/p/533106355
因为大多数内容无需太多修改(注意个别文件输出位置),这里就不多加赘述了
运行Vins-mono
至此我们的工作就全部做完了,现在我们来运行我们的vins-mono!
首先在ros要打开你的相机和imu,打开rostopic list确保他们都在运行(方法上面已经给过了)
然后进入工作空间启动ros
source ./devel/setup.bash
roslaunch vins_estimator realsense_color.launch
roslaunch vins_estimator vins_rviz.launch //打开rviz查看
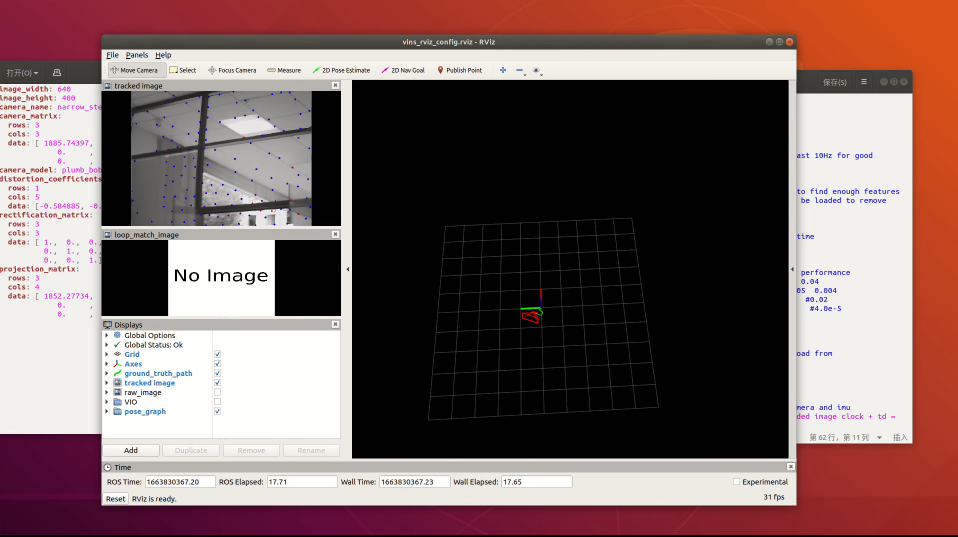
大功告成!
参考链接
- 相机与IMU联合标定 https://blog.csdn.net/crp997576280/article/details/109592631 熊猫飞天
- 跑通流程 https://www.zhihu.com/question/408978633/answer/2477023448 智能之欣
- 相机标定 http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration wiki.ros
- 摄像头标定--camera_calibration https://blog.csdn.net/bingda_robot/article/details/126718291 冰达机器人
- 无响应问题的解决 https://blog.csdn.net/JasonSunJian/article/details/79177570 JasonSunJian
- LPMS-IG1 IMU内参标定 https://blog.csdn.net/yz2630570484/article/details/118081787 雨沐清风i
- openzen安装 http://wiki.ros.org/openzen_sensor wiki
- 相机究竟标定了什么 https://zhuanlan.zhihu.com/p/448120739 卷饼
- VINS-MONO 配置文件yaml https://zhuanlan.zhihu.com/p/533106355 陌归
【项目实战】自备相机+IMU跑通Vins-Mono记录的更多相关文章
- Android项目实战(四十九):Andoird 7.0+相机适配
解决方案类似: Android项目实战(四十):Andoird 7.0+ 安装APK适配 解决方法: 一.在AndroidManifest.xml 文件中添加 四大组件之一的 <provider ...
- CocoStuff—基于Deeplab训练数据的标定工具【二、用已提供的标注数据跑通项目】
一.说明 本文为系列博客第二篇,主要讲述笔者在使用该团队提供已经标注好的COCO数据集进行训练的过程. 由于在windows中编译Caffe和Deeplab特别的麻烦,笔者并没有去探索,后续可能会去尝 ...
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
- 终于跑通分布式事务框架tcc-transaction的示例项目
1.背景 前段时间在看项目代码的时候,发现有些接口的流程比较长,在各个服务里面都有通过数据库事务保证数据的一致性,但是在上游的controller层并没有对一致性做保证. 网上查了下,还没找到基于Go ...
- 使用Typescript重构axios(二)——项目起手,跑通流程
0.系列文章 1.使用Typescript重构axios(一)--写在最前面 2.使用Typescript重构axios(二)--项目起手,跑通流程 3.使用Typescript重构axios(三)- ...
- 项目实战:Qt+Ffmpeg+OpenCV相机程序(打开摄像头、支持多种摄像头、分辨率调整、翻转、旋转、亮度调整、拍照、录像、回放图片、回放录像)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- 项目实战13—企业级虚拟化Virtualization-KVM技术
项目实战系列,总架构图 http://www.cnblogs.com/along21/p/8000812.html KVM的介绍.准备工作和qemu-kvm 命令详解 1.介绍 (1)介绍 KVM:就 ...
- 相机IMU融合四部曲(二):误差状态四元数详细解读
相机IMU融合四部曲(二):误差状态四元数详细解读 极品巧克力 前言 上一篇文章,<D-LG-EKF详细解读>中,讲了理论上的SE3上相机和IMU融合的思想.但是,还没有涉及到实际的操作, ...
- Vue2构建项目实战
转载整理自http://blog.csdn.net/fungleo/article/details/77575077 vue构建单页应用原理 SPA 不是指水疗.是 single page web a ...
随机推荐
- Day05 表格
表格 <table width="300" border="1" cellspacing="0"> <caption> ...
- .NET(C#)发送邮件的实现方法
.NET(C#)发送邮件的实现方法 微软已经为我们准备好了现成的工具类供我们调用: MailMessage //邮件信息类 SmtpClient //邮件发送类 首先需要在项目的类文件中引用以下命名空 ...
- .NET GC工作流程
前言 在上文[如何获取GC的STW时间]一文中,我们聊到了如何通过监听GC发出的诊断事件来计算STW时间.里面只简单的介绍了几种GC事件和它的流程. 群里就有小伙伴在问,那么GC事件是什么时候产生的? ...
- 任何快速查询IP归属地
最近公司项目需要做一个IP归属地查询的功能,想着如果用现成的API就可以大大提高开发效率,所以在网上的API商店搜索了一番,发现了 APISpace,它里面的IP归属地API非常符合我的开发需求. ...
- 4-1 Spring框架基础知识
Spring框架基础知识 1.Spring 框架作用 主要解决了创建对象和管理对象的问题. 自动装配机制 2.Spring 框架 (Spring容器,JavaBean容器,Bean容器,Spring容 ...
- 五分钟给你的 gRPC服务 加上 HTTP 接口
gRPC 服务要加 HTTP 接口? go-zero 给大家带来极简的 RESTful 和 gRPC 服务开发体验的同时,社区又给我们提出了新的期望: 我想只写一次代码 既要 gRPC 接口 也要 H ...
- 发明Linux的帕特里克
Slackware Linux 是目前市场存活时间最长的 Linux 发行版之一,它基于一个叫做 SLS(Soft Landing Systems)的 Linux 项目而设计,易于使用和稳定. Sla ...
- vue2升级vue3:Vue Demij打通vue2与vue3壁垒,构建通用组件
如果你的vue2代码之前是使用vue-class-component 类组件模式写的.选择可以使用 https://github.com/facing-dev/vue-facing-decorator ...
- 使用gulp助力前端自动化
前言 随着前端诸如webpack,rollup,vite的发展,gulp感觉似乎好像被取代了.其实并没有,只不过它从台前退居到了幕后.我们仍然可以在很多项目中看到它的身影,比如elementplus. ...
- React报错之Style prop value must be an object
正文从这开始~ 总览 在React中,当我们为元素的style 属性传递字符串时,会产生"Style prop value must be an object"警告.为了解决该警告 ...