跟我学Python图像处理丨基于灰度三维图的图像顶帽运算和黑帽运算
摘要:本篇文章结合灰度三维图像讲解图像顶帽运算和图像黑猫运算,通过Python调用OpenCV函数实现。
本文分享自华为云社区《[Python图像处理] 十三.基于灰度三维图的图像顶帽运算和黑帽运算》,作者: eastmount。
本篇文章继续深入,结合灰度三维图像讲解图像顶帽运算和图像黑猫运算,通过Python调用OpenCV函数实现。
一.图像顶帽运算
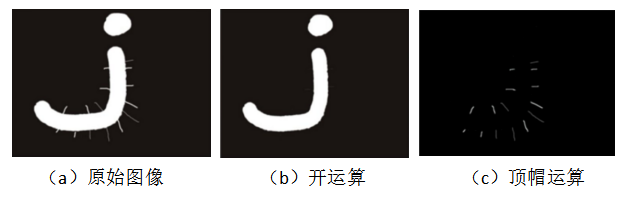
图像顶帽运算(top-hat transformation)又称为图像礼帽运算,它是用原始图像减去图像开运算后的结果,常用于解决由于光照不均匀图像分割出错的问题。其公式定义如下:

图像顶帽运算是用一个结构元通过开运算从一幅图像中删除物体,校正不均匀光照的影响,其效果图如下图所示。
在Python中,图像顶帽运算主要调用morphologyEx()实现,其中参数cv2.MORPH_TOPHAT表示顶帽处理,函数原型如下:
dst = cv2.morphologyEx(src, cv2.MORPH_TOPHAT, kernel)
- src表示原始图像
- cv2.MORPH_TOPHAT表示图像顶帽运算
- kernel表示卷积核,可以用numpy.ones()函数构建
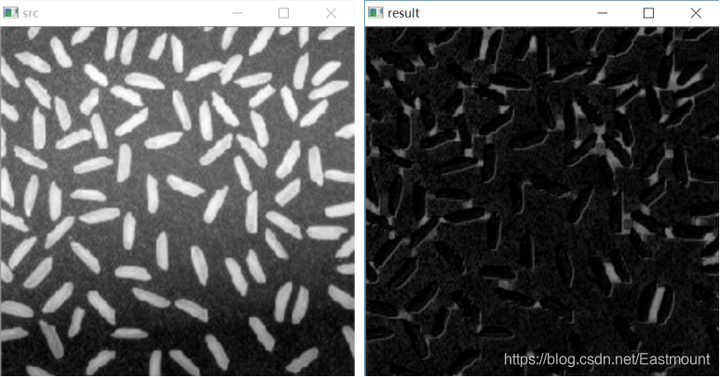
假设存在一张光照不均匀的米粒图像,如图所示,我们需要调用图像顶帽运算解决光照不均匀的问题。其Python代码如下所示:

#encoding:utf-8
import cv2
import numpy as np
#读取图片
src = cv2.imread('test06.png', cv2.IMREAD_UNCHANGED)
#设置卷积核
kernel = np.ones((10,10), np.uint8)
#图像顶帽运算
result = cv2.morphologyEx(src, cv2.MORPH_TOPHAT, kernel)
#显示图像
cv2.imshow("src", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
其运行结果如下,它有效地将米粒与背景分离开来。

二.图像黑帽运算
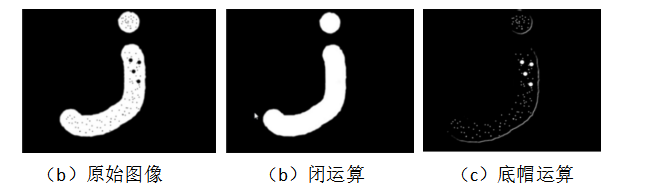
图像底帽运算(bottom-hat transformation)又称为图像黑帽运算,它是用图像闭运算操作减去原始图像后的结果,从而获取图像内部的小孔或前景色中黑点,也常用于解决由于光照不均匀图像分割出错的问题。其公式定义如下:

图像底帽运算是用一个结构元通过闭运算从一幅图像中删除物体,常用于校正不均匀光照的影响。其效果图如下图所示。
在Python中,图像底帽运算主要调用morphologyEx()实现,其中参数cv2.MORPH_BLACKHAT表示底帽或黑帽处理,函数原型如下:
dst = cv2.morphologyEx(src, cv2.MORPH_BLACKHAT, kernel)
- src表示原始图像
- cv2.MORPH_BLACKHAT表示图像底帽或黑帽运算
- kernel表示卷积核,可以用numpy.ones()函数构建
Python实现图像底帽运算的代码如下所示:
#encoding:utf-8
import cv2
import numpy as np
#读取图片
src = cv2.imread('test06.png', cv2.IMREAD_UNCHANGED)
#设置卷积核
kernel = np.ones((10, 10), np.uint8)
#图像黑帽运算
result = cv2.morphologyEx(src, cv2.MORPH_BLACKHAT, kernel)
#显示图像
cv2.imshow("src", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
其运行结果如图所示:
三.基于灰度三维图的顶帽黑帽运算
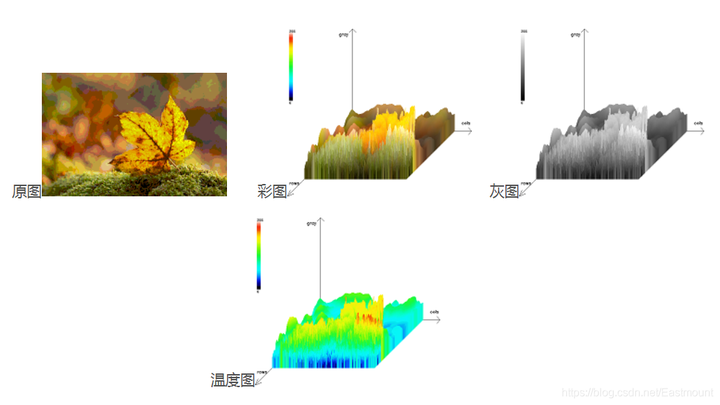
为什么图像顶帽运算会消除光照不均匀的效果呢?通常可以利用灰度三维图来进行解释该算法。灰度三维图主要调用Axes3D包实现,对原图绘制灰度三维图的代码如下:
# -*- coding: utf-8 -*-
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
#读取图像
img = cv.imread("test06.png")
img = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
imgd = np.array(img) #image类转numpy
#准备数据
sp = img.shape
h = int(sp[0]) #图像高度(rows)
w = int(sp[1]) #图像宽度(colums) of image
#绘图初始处理
fig = plt.figure(figsize=(16,12))
ax = fig.gca(projection="3d")
x = np.arange(0, w, 1)
y = np.arange(0, h, 1)
x, y = np.meshgrid(x,y)
z = imgd
surf = ax.plot_surface(x, y, z, cmap=cm.coolwarm)
#自定义z轴
ax.set_zlim(-10, 255)
ax.zaxis.set_major_locator(LinearLocator(10)) #设置z轴网格线的疏密
#将z的value字符串转为float并保留2位小数
ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f'))
# 设置坐标轴的label和标题
ax.set_xlabel('x', size=15)
ax.set_ylabel('y', size=15)
ax.set_zlabel('z', size=15)
ax.set_title("surface plot", weight='bold', size=20)
#添加右侧的色卡条
fig.colorbar(surf, shrink=0.6, aspect=8)
plt.show()
运行结果如下图所示:
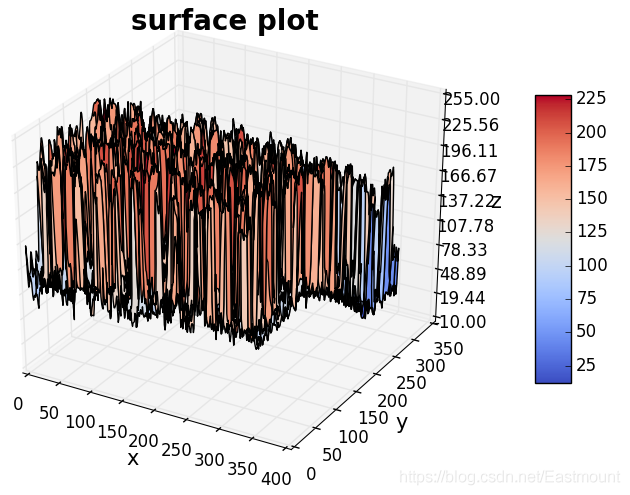
从图像中的像素走势显示了该图受各部分光照不均匀的影响,从而造成背景灰度不均现象,其中凹陷对应图像中灰度值比较小的区域。而通过图像白帽运算后的图像灰度三维图的代码如下:
# -*- coding: utf-8 -*-
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
#读取图像
img = cv.imread("test06.png")
img = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
#图像黑帽运算
kernel = np.ones((10,10), np.uint8)
result = cv.morphologyEx(img, cv.MORPH_BLACKHAT, kernel)
#image类转numpy
imgd = np.array(result)
#准备数据
sp = result.shape
h = int(sp[0]) #图像高度(rows)
w = int(sp[1]) #图像宽度(colums) of image
#绘图初始处理
fig = plt.figure(figsize=(8,6))
ax = fig.gca(projection="3d")
x = np.arange(0, w, 1)
y = np.arange(0, h, 1)
x, y = np.meshgrid(x,y)
z = imgd
surf = ax.plot_surface(x, y, z, cmap=cm.coolwarm)
#自定义z轴
ax.set_zlim(-10, 255)
ax.zaxis.set_major_locator(LinearLocator(10)) #设置z轴网格线的疏密
#将z的value字符串转为float并保留2位小数
ax.zaxis.set_major_formatter(FormatStrFormatter('%.02f'))
# 设置坐标轴的label和标题
ax.set_xlabel('x', size=15)
ax.set_ylabel('y', size=15)
ax.set_zlabel('z', size=15)
ax.set_title("surface plot", weight='bold', size=20)
#添加右侧的色卡条
fig.colorbar(surf, shrink=0.6, aspect=8)
plt.show()
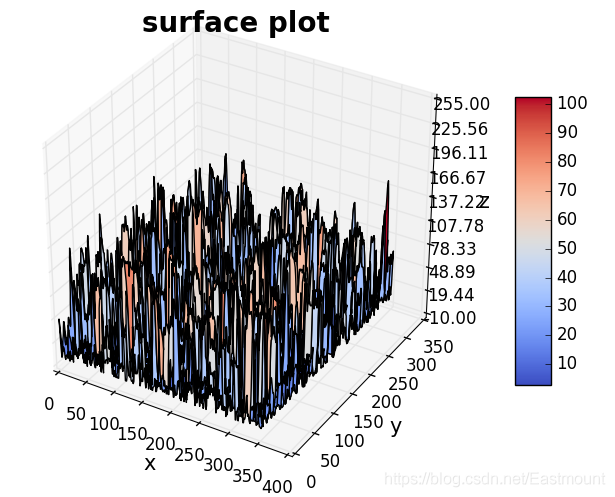
效果图如下所示,对应的灰度更集中于10至100区间,由此证明了不均匀的背景被大致消除了,有利于后续的阈值分割或图像分割。
跟我学Python图像处理丨基于灰度三维图的图像顶帽运算和黑帽运算的更多相关文章
- Python 图像处理 OpenCV (10):图像处理形态学之顶帽运算与黑帽运算
前文传送门: 「Python 图像处理 OpenCV (1):入门」 「Python 图像处理 OpenCV (2):像素处理与 Numpy 操作以及 Matplotlib 显示图像」 「Python ...
- Python图像处理丨基于OpenCV和像素处理的图像灰度化处理
摘要:本篇文章讲解图像灰度化处理的知识,结合OpenCV调用cv2.cvtColor()函数实现图像灰度操作,使用像素处理方法对图像进行灰度化处理. 本文分享自华为云社区<[Python图像处理 ...
- 跟我学Python图像处理丨何为图像的灰度非线性变换
摘要:本文主要讲解灰度线性变换,基础性知识希望对您有所帮助. 本文分享自华为云社区<[Python图像处理] 十六.图像的灰度非线性变换之对数变换.伽马变换>,作者:eastmount . ...
- 跟我学Python图像处理丨傅里叶变换之高通滤波和低通滤波
摘要:本文讲解基于傅里叶变换的高通滤波和低通滤波. 本文分享自华为云社区<[Python图像处理] 二十三.傅里叶变换之高通滤波和低通滤波>,作者:eastmount . 一.高通滤波 傅 ...
- 跟我学Python图像处理丨关于图像金字塔的图像向下取样和向上取样
摘要:本文讲述图像金字塔知识,了解专门用于图像向上采样和向下采样的pyrUp()和pyrDown()函数. 本文分享自华为云社区<[Python图像处理] 二十一.图像金字塔之图像向下取样和向上 ...
- 跟我学Python图像处理丨带你掌握傅里叶变换原理及实现
摘要:傅里叶变换主要是将时间域上的信号转变为频率域上的信号,用来进行图像除噪.图像增强等处理. 本文分享自华为云社区<[Python图像处理] 二十二.Python图像傅里叶变换原理及实现> ...
- 跟我学Python图像处理丨图像特效处理:毛玻璃、浮雕和油漆特效
摘要:本文讲解常见的图像特效处理,从而让读者实现各种各样的图像特殊效果,并通过Python和OpenCV实现. 本文分享自华为云社区<[Python图像处理] 二十四.图像特效处理之毛玻璃.浮雕 ...
- 跟我学Python图像处理丨获取图像属性、兴趣ROI区域及通道处理
摘要:本篇文章主要讲解Python调用OpenCV获取图像属性,截取感兴趣ROI区域,处理图像通道. 本文分享自华为云社区<[Python图像处理] 三.获取图像属性.兴趣ROI区域及通道处理 ...
- Python图像处理丨认识图像锐化和边缘提取的4个算子
摘要:图像锐化和边缘提取技术可以消除图像中的噪声,提取图像信息中用来表征图像的一些变量,为图像识别提供基础. 本文分享自华为云社区<[Python图像处理] 十七.图像锐化与边缘检测之Rober ...
随机推荐
- 8条github使用小技巧
1 简介 作为全球最大的开源及私有软件项目托管社区平台,github可以显著地帮助从事编程相关工作的人员提升自己的技术水平,也是费老师我日常最常浏览学习的技术类网站. github为了使得其使用更加便 ...
- 微前端(qiankun)主应用共享React组件
前言 最近需要重构一个老项目,定的方案用微前端去改造.主应用是老的项目,微应用是新的项目,由于重构时间比较紧张,子应用还需要使用父应用的一些组件.过程中遇到一些问题,记录一下. 方案 我们知道qian ...
- 2020 CSP-J 初赛游记
估分 预估 85 分,一是怕选错,而是最后真的错了一些 考点 排列组合:论临时抱佛脚的作用 靠前看了一下捆绑法和插板法,果然考了. 2.算法常识,和复杂度分析 冒泡排序最小交换次数 = n-1 , G ...
- 技术分享 | app自动化测试(Android)--高级定位技巧
原文链接 XPath高级定位技巧 XPath 简介 XPath 的英文全称为:XML Path Language,意旨对 XML 中的元素进行路径定位的一种语言,它可适用 XML 标记语言,Html ...
- BUUCTF-ningen
ningen 从16进制看可以发现其中有压缩包,存在着504b0304,使用binwalk分离即可 压缩包带密码,根据提示是四位纯数字 使用ARCHPR破解即可
- jenkins+k8s部署
1. jenkins配置部署,从git或者svn等拉取代码,编制打包,在博客的jenkins那块有具体的讲解 2. 将打好的包war/java包拷贝到k8s-Master,或者在jenkins上也行, ...
- RPA应用场景-日终清算操作
场景概述 日终清算操作 所涉系统名称 登记过户管理系统(TA),投资交易系统(032) 人工操作(时间/次) 60-80分钟 所涉人工数量 2 操作频率 每日 场景流程 这两个流程一般在晚上8-9点开 ...
- HashMap的实现原理?如何保证HashMap线程安全?
A:HashMap简单说就是它根据建的hashcode值存储数据的,大多数情况下可以直接定位到它的值,因而具有很快的访问速度,但遍历的顺序是不确定的. B:HashMap基于哈希表,底层结构由数组来实 ...
- python基础教程:定义类创建实例
类的定义 在Python中,类通过class关键字定义,类名以大写字母开头 >>>class Person(object): #所有的类都是从object类继承 pass #pass ...
- Tapdata 与阿里云 PolarDB 开源数据库社区联合共建开放数据技术生态
近日,阿里云 PolarDB 开源数据库社区宣布将与 Tapdata 联合共建开放数据技术生态.在此之际,一直专注实时数据服务平台的 Tapdata ,也宣布开源其数据源开发框架--PDK(Plu ...