STM32 f407 温湿度采集报警
软件
keil5
实现
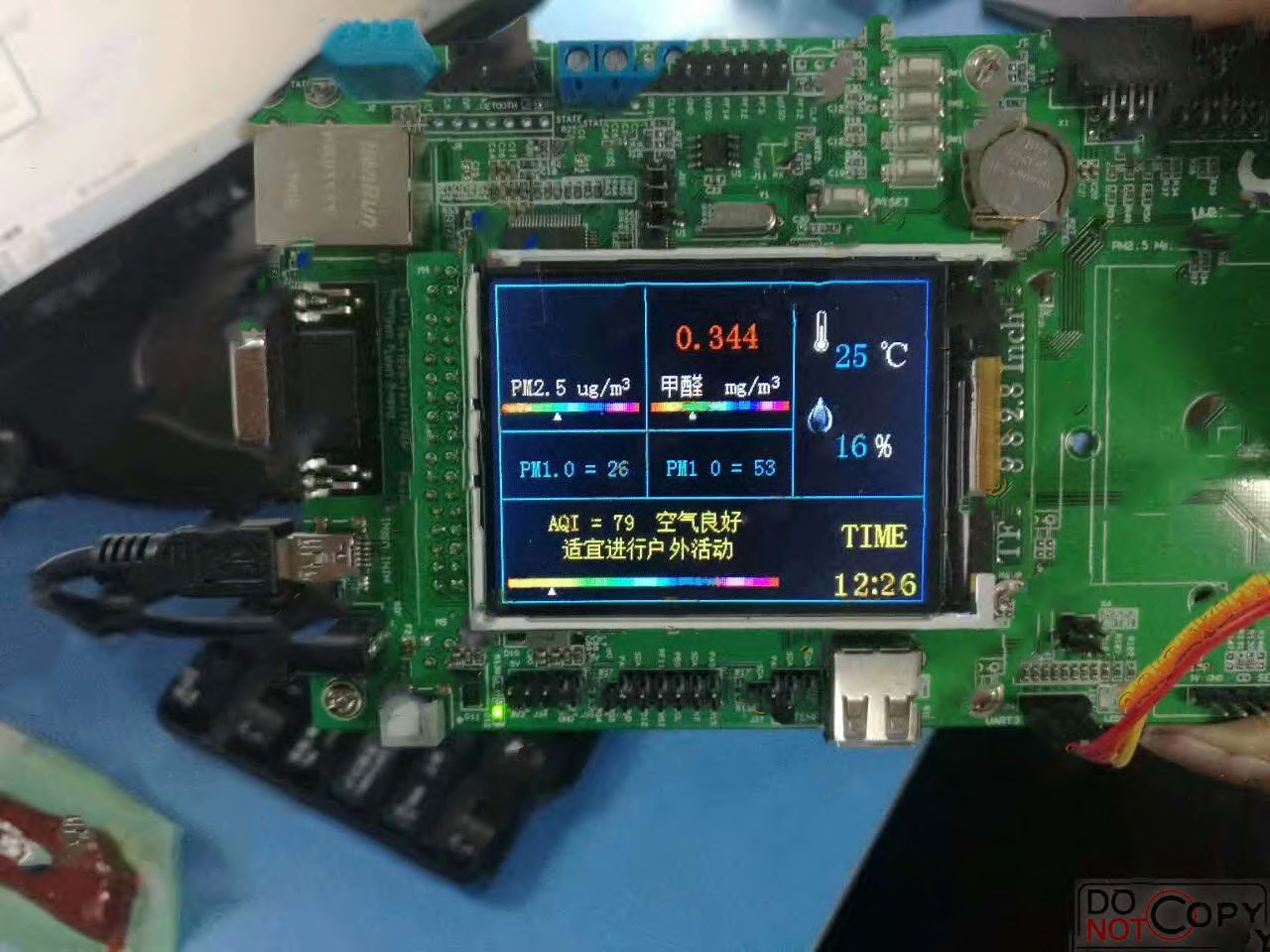
1.使用stm32f407中的DS18B20传感器采集空气温度
2.使用stm32f407中的DHT11传感器采集空气的温度和湿度
3.显示到stm32f407的LCD液晶显示器上
4.当温度超过30℃时,led灯 和 电磁继电器控制的灯闪烁,蜂鸣器持续响
5.当温度低于30℃时,一切恢复
效果
源码
main.c
#include "led.h"
#include "button.h"
#include "buzzer.h"
#include "delay.h"
#include "lcd.h"
#include "ds18b20.h"
#include "dht11.h"
#define WAR_T 30
int main(void) {
int yan;
char buf[10];
char dht[5];
delay_init();
LCD_Init();
buzzer_init();
//320 * 240
DS18B20_Init();
dht_init();
LCD_Clear(0x01CF);
BRUSH_COLOR = WHITE;
BACK_COLOR = 0x1f << 11;
//BACK_COLOR = BLACK;
//LCD_DisplayString(30, 50, 24, (u8 *)" 0.0 ");
LCD_DisplayMyname(10,200); //Ãû×Ö
LCD_Draw_Rectangle(1, 1, 318, 238);
LCD_Draw_Line( 110,1 ,110 ,160 );
LCD_Draw_Line( 220,1 ,220 ,160 );
LCD_Draw_Line( 1,120 ,220 ,120 );
LCD_Draw_Line( 1,160 ,318 ,160 );
LCD_DisplayString(10, 70, 16, (u8 *)"PM2.5 ug/m3");
LCD_DisplayString(125, 70, 16, (u8 *)"HCHO mg/m3");
LCD_DisplayString(260, 170, 24, (u8 *)"TIME");
LCD_DisplayString(220, 200, 24, (u8 *)"12 : 00");
LCD_DisplayString(30, 175, 24, (u8 *)"WELCOME !");
LCD_DisplayTu1(225,20);
LCD_DisplayTu2(225,100);
//for(yan=0xF800;yan<=0xFFE0;yan++);
LCD_Draw_Rectangle(10, 90, 90, 100);
LCD_Draw_Rectangle(125, 90, 210, 100);
LCD_Fill_onecolor(10, 95, 90, 100,yan);
LCD_Fill_onecolor(125, 95, 210, 100,yan);
while(1) {
int i;
get_temperature(buf);
LCD_DisplayString(225, 50, 24, (u8 *)buf);
LCD_DisplayOTherChar(295,50,0,24);//温度符号
dht_get_data(dht);
LCD_DisplayNum(285, 100, dht[0], 2, 24, 0);
LCD_DisplayNum(285, 20, dht[2], 2, 24, 0);
//if( buf[1] >= '0'+2 && buf[2] >= 9+'0')
delay_ms(500);
}
}
led.h
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx_conf.h"
/*
LED0 PE3
LED1 PE4
LED2 PG9
GPIO管脚输出高电压时灯灭 低电压时亮
1.对于GPIO管脚打开时钟
*/
#define GPIOE_MODER (*(volatile unsigned int *)(GPIOE_BASE + 0x00))
#define GPIOE_OTYPER (*(volatile unsigned int *)(GPIOE_BASE + 0x04))
#define GPIOE_OSPEEDR (*(volatile unsigned int *)(GPIOE_BASE + 0x08))
#define GPIOE_PUPDR (*(volatile unsigned int *)(GPIOE_BASE + 0x0C))
#define GPIOE_ODR (*(volatile unsigned int *)(GPIOE_BASE + 0x14))
#define GPIOG_MODER (*(volatile unsigned int *)(GPIOG_BASE + 0x00))
#define GPIOG_OTYPER (*(volatile unsigned int *)(GPIOG_BASE + 0x04))
#define GPIOG_OSPEEDR (*(volatile unsigned int *)(GPIOG_BASE + 0x08))
#define GPIOG_PUPDR (*(volatile unsigned int *)(GPIOG_BASE + 0x0C))
#define GPIOG_ODR (*(volatile unsigned int *)(GPIOG_BASE + 0x14))
extern void led_init(void);
extern void led_on(int no);
extern void led_off(int no);
#endif
led.c
#include "led.h"
#include "bitband.h"
void led_init(void) {
GPIO_InitTypeDef LED;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOG, ENABLE);
LED.GPIO_Mode = GPIO_Mode_OUT;
LED.GPIO_OType = GPIO_OType_PP;
LED.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4;
LED.GPIO_PuPd = GPIO_PuPd_NOPULL;
LED.GPIO_Speed = GPIO_Fast_Speed;
GPIO_Init(GPIOE, &LED);
LED.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOG, &LED);
GPIO_SetBits(GPIOE, GPIO_Pin_3 | GPIO_Pin_4);
GPIO_SetBits(GPIOG, GPIO_Pin_9);
}
void led_on(int no) {
switch(no) {
case 0 :
PGOut(9) = 0;
break;
case 1 :
PEOut(4) = 0;
break;
case 2 :
PEOut(3) = 0;
break;
default:
break;
}
}
void led_off(int no) {
switch(no) {
case 0 :
PGOut(9) = 1;
break;
case 1 :
PEOut(4) = 1;
break;
case 2 :
PEOut(3) = 1;
break;
default:
break;
}
}
button.h
#ifndef __BUTTON_H
#define __BUTTON_H
#include "stm32f4xx_conf.h"
extern void button_init(void);
extern int button_state(int);
#endif
button.c
#include "button.h"
#include "bitband.h"
// PF9 PF8 PF7 PE6
//按键按下是1 抬起是0
void button_init(void) {
GPIO_InitTypeDef BUTTON;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE);
BUTTON.GPIO_Mode = GPIO_Mode_IN;
BUTTON.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
BUTTON.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOF, &BUTTON);
BUTTON.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOE, &BUTTON);
}
int button_state(int no) {
int ret;
switch(no) {
case 0 :
ret = PFIn(9);
break;
case 1 :
ret = PFIn(8);
break;
case 2 :
ret = PFIn(7);
break;
case 3 :
ret = PEIn(6);
break;
default:
ret = 1;
break;
} return !ret;
}
buzzer.h
#ifndef __BUZZER_H
#define __BUZZER_H
#include "stm32f4xx_conf.h"
extern void buzzer_init(void);
extern void buzzer_on(void);
extern void buzzer_off(void);
#endif
buzzer.c
#include "buzzer.h"
#include "bitband.h"
//pd7
void buzzer_init(void) {
GPIO_InitTypeDef BUZZER;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
BUZZER.GPIO_Mode = GPIO_Mode_OUT;
BUZZER.GPIO_OType = GPIO_OType_PP;
BUZZER.GPIO_Pin = GPIO_Pin_7;
BUZZER.GPIO_PuPd = GPIO_PuPd_NOPULL;
BUZZER.GPIO_Speed = GPIO_Fast_Speed;
GPIO_Init(GPIOD, &BUZZER);
GPIO_ResetBits(GPIOD, GPIO_Pin_7);
}
void buzzer_on(void) {
PDOut(7) = 1;
}
void buzzer_off(void) {
PDOut(7) = 0;
}
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "stm32f4xx.h"
typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//GPIO
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
//GPIO
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
#define PAOut(n) BIT_ADDR(GPIOA_ODR_Addr,n)
#define PAIn(n) BIT_ADDR(GPIOA_IDR_Addr,n)
#define PBOut(n) BIT_ADDR(GPIOB_ODR_Addr,n)
#define PBIn(n) BIT_ADDR(GPIOB_IDR_Addr,n)
#define PCOut(n) BIT_ADDR(GPIOC_ODR_Addr,n)
#define PCIn(n) BIT_ADDR(GPIOC_IDR_Addr,n)
#define PDOut(n) BIT_ADDR(GPIOD_ODR_Addr,n)
#define PDIn(n) BIT_ADDR(GPIOD_IDR_Addr,n)
#define PEOut(n) BIT_ADDR(GPIOE_ODR_Addr,n)
#define PEIn(n) BIT_ADDR(GPIOE_IDR_Addr,n)
#define PFOut(n) BIT_ADDR(GPIOF_ODR_Addr,n)
#define PFIn(n) BIT_ADDR(GPIOF_IDR_Addr,n)
#define PGOut(n) BIT_ADDR(GPIOG_ODR_Addr,n)
#define PGIn(n) BIT_ADDR(GPIOG_IDR_Addr,n)
#define PHOut(n) BIT_ADDR(GPIOH_ODR_Addr,n)
#define PHIn(n) BIT_ADDR(GPIOH_IDR_Addr,n)
#define PIOut(n) BIT_ADDR(GPIOI_ODR_Addr,n)
#define PIIn(n) BIT_ADDR(GPIOI_IDR_Addr,n)
#define SYSCLK 168 //调用系统时钟
void delay_init(void);
void delay_ms(u16 nms);
void delay_us(u32 nus);
#endif
delay.c
#include "delay.h"
//利用系统定时,编写的延时函数
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数,在ucos下,代表每个街拍的ms数
/****************************************************************************
* 名称: delay_init()
*功能:延时函数初始化
* 入口参数:无
* 返回参数:无
****************************************************************************/
void delay_init() {
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
fac_us=SYSCLK/8;
fac_ms=(u16)fac_us*1000; //每个ms需要的systick时钟数
}
/****************************************************************************
* 名称: void delay_us(u32 nus)
* 功能:延时nus
* 入口参数:要延时的微秒数
* 返回参数:无
* 说明:nus的值 不要大于798915us
****************************************************************************/
void delay_us(u32 nus) {
u32 midtime;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do {
midtime=SysTick->CTRL;
}
while((midtime&0x01)&&!(midtime&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
/****************************************************************************
* 名称: void delay_xms(u16 nms)
* 功能:延时nms
* 入口参数:要延时的毫秒数
* 返回参数:无
* 说明:SysTick->LOAD为24位寄存器,所以,最大延时为:nms<=0xffffff*8*1000/SYSCLK
对168M条件下nms<=798ms
****************************************************************************/
void delay_xms(u16 nms) {
u32 midtime;
SysTick->LOAD=(u32)nms*fac_ms;//时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do {
midtime=SysTick->CTRL;
}
while((midtime&0x01)&&!(midtime&(1<<16)));//等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
/****************************************************************************
* 名称: void delay_ms(u16 nms)
* 功能:延时nms
* 入口参数:要延时的毫秒数
* 返回参数:无
* 说明:nms:0~65535
****************************************************************************/
void delay_ms(u16 nms) {
u8 repeat=nms/540; //这里用540,是考虑到某些地方可能超频使用
//比如超频到248M的时候,delay_xms最大智能延时541ms左右了
u16 remain=nms%540;
while(repeat) {
delay_xms(540);
repeat--;
}
if(remain)delay_xms(remain);
}
lcd.h
#ifndef __LCD_H
#define __LCD_H
#include "delay.h"
#include "stdlib.h"
//LCD驱动重要参数集
extern u16 lcd_id; //LCD ID
extern u8 dir_flag; //横屏还是竖屏控制:0,竖屏;1,横屏
extern u16 lcd_width; //LCD宽度
extern u16 lcd_height; //LCD高度
extern u16 write_gramcmd; //写gram指令
extern u16 setxcmd; //设置x坐标指令
extern u16 setycmd; //设置y坐标指令
//LCD的画笔颜色和背景色
extern u16 BRUSH_COLOR;//默认红色
extern u16 BACK_COLOR; //背景颜色 默认为白色
//-----------------LCD背光端口定义----------------
#define LCD_BACK PDOut(3)//PFout(10) //LCD背光 PF10
//根据硬件电路图可以看靠我们使用NOR/SRAM的Bank1.sector4,地址位 HADDR[27,26]=11
//A12作为数据命令区分线
//因为我们使用的是16位的数据高度,所以要注意设置时STM32内部会右移一位对齐
#define CMD_BASE ((u32)(0x6C000000 | 0x00000000))
#define DATA_BASE ((u32)(0x6C000000 | 0x00002000))
#define LCD_CMD ( * (volatile u16 *) CMD_BASE )
#define LCD_DATA ( * (volatile u16 *) DATA_BASE)
//扫描方向定义
#define L2R_U2D 0 //从左到右 从上到下
#define L2R_D2U 1 //从左到右 从下到上
#define R2L_U2D 2 //从右到左 从上到下
#define R2L_D2U 3 //从右到左 从下到上
#define U2D_L2R 4 //从上到下 从左到右
#define U2D_R2L 5 //从上到下 从右到左
#define D2U_L2R 6 //从下到上 从左到右
#define D2U_R2L 7 //从下到上 从右到左
#define INIT_SCAN_DIR R2L_U2D //设置初始化扫描方向
//颜色值定义
#define WHITE 0xFFFF
#define BLACK 0x0000
#define BLUE 0x001F
#define GREEN 0x07E0
#define BRED 0XF81F
#define GRED 0XFFE0
#define GBLUE 0X07FF
#define BROWN 0XBC40
#define BRRED 0XFC07
#define GRAY 0X8430
#define RED 0xF800
#define MAGENTA 0xF81F
#define CYAN 0x7FFF
#define YELLOW 0xFFE0
#define DARKBLUE 0X01CF //深蓝
#define LIGHTBLUE 0X7D7C //浅蓝
#define GRAYBLUE 0X5458 //灰蓝
#define JBS for(JBS=RED;JBS<=DARKBLUE;JBS++)
void LCD_WriteReg(u16 LCD_Reg, u16 LCD_Value);
u16 LCD_ReadReg(u16 LCD_Reg);
void LCD_WriteRAM_Prepare(void);
void LCD_Init(void);//初始化
void LCD_DisplayOn(void);//开显示
void LCD_DisplayOff(void);//关显示
void LCD_Clear(u16 Color);//清屏
void LCD_SetCursor(u16 Xpos, u16 Ypos); //设置光标
void LCD_DrawPoint(u16 x,u16 y); //画点
void LCD_Color_DrawPoint(u16 x,u16 y,u16 color); //颜色画点
u16 LCD_GetPoint(u16 x,u16 y); //读点
void LCD_AUTOScan_Dir(u8 dir);
void LCD_Display_Dir(u8 dir);
void LCD_Set_Window(u16 sx,u16 sy,u16 width,u16 height);
void LCD_Draw_Circle(u16 x0,u16 y0,u8 r); //画图
void LCD_Draw_Line(u16 x1, u16 y1, u16 x2, u16 y2);//画线
void LCD_Draw_Rectangle(u16 x1, u16 y1, u16 x2, u16 y2); //画矩形
void LCD_Fill_onecolor(u16 sx,u16 sy,u16 ex,u16 ey,u16 color); //填充单个颜色
void LCD_Draw_Picture(u16 sx,u16 sy,u16 ex,u16 ey,u16 *color); //填充指定颜色
void LCD_DisplayChar(u16 x,u16 y,u8 word,u8 size); //显示一个字符
void LCD_DisplayOTherChar(u16 x,u16 y,u8 word,u8 size); //显示除ASCII之外的字符
void LCD_DisplayNum(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode); //显示 数字
void LCD_DisplayNum_color(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode,u16 brushcolor,u16 backcolor); //显示自定义数字
void LCD_DisplayString(u16 x,u16 y,u8 size,u8 *p); //显示一个12/16/24字体字符串
void LCD_DisplayString_color(u16 x,u16 y,u8 size,u8 *p,u16 brushcolor,u16 backcolor); //显示一个12/16/24字体自定义颜色的字符串
void LCD_DisplayMyname(u16 x,u16 y);
void LCD_DisplayTu1(u16 x,u16 y);
void LCD_DisplayTu2(u16 x,u16 y);
#endif
lcd.c
#include "lcd.h"
#include "cfont.h"
//初始化LCD的画笔颜色和背景色
u16 BRUSH_COLOR=BLACK; //画笔颜色
u16 BACK_COLOR=WHITE; //背景色
//管理LCD驱动重要参数
u16 lcd_id; //LCD ID
u16 lcd_width; //LCD的宽度
u16 lcd_height; //LCD的高度
u16 write_gramcmd=0X2C;
u16 read_gramcmd = 0x2E;
u16 setxcmd=0X2A;
u16 setycmd=0X2B;
/****************************************************************************
* 名称: void LCD_WriteReg(u16 LCD_Reg, u16 LCD_Value)
* 功能:LCD写寄存器
* 入口参数:LCD_Reg: 寄存器地址
* LCD_RegValue: 要写入的数据
****************************************************************************/
void LCD_WriteReg(u16 LCD_Reg, u16 LCD_Value) {
LCD_CMD = LCD_Reg; //写入要写的寄存器序号
LCD_DATA = LCD_Value; //向寄存器写入的数据
}
/****************************************************************************
* 名称: u16 LCD_ReadReg(u16 LCD_Reg)
* 功能:LCD读寄存器
* 入口参数:LCD Reg:寄存器地址
* 返回参数:督导该寄存器序号里的值
****************************************************************************/
u16 LCD_ReadReg(u16 LCD_Reg) {
LCD_CMD=LCD_Reg; //写入要读的寄存器序号
delay_us(5);
return LCD_DATA; //返回读到的值
}
//开始写GRAM
void LCD_WriteRAM_Prepare(void) {
LCD_CMD=write_gramcmd;
}
//lcd延时函数
void lcdm_delay(u8 i) {
while(i--);
}
//LCD开启显示
void LCD_DisplayOn(void) {
LCD_CMD=0x29;
}
//LCD关闭显示
void LCD_DisplayOff(void) {
LCD_CMD=0x28;
}
/****************************************************************************
*名称: void LCD_SetCursor(u16 Xaddr, u16 Yaddr)
* 功能:设置光标位置
* 入口参数:x:x坐标 y:y坐标
****************************************************************************/
void LCD_SetCursor(u16 Xaddr, u16 Yaddr) {
LCD_CMD=setxcmd;
LCD_DATA=(Xaddr>>8);
LCD_DATA=(Xaddr&0XFF);
LCD_CMD=setycmd;
LCD_DATA=(Yaddr>>8);
LCD_DATA=(Yaddr&0XFF);
}
/****************************************************************************
* 名称: void LCD_AUTOScan_Dir(u8 dir)
* 功能:设置LCD的自动扫描方向
* 入口参数:dir:扫描方向
****************************************************************************/
void LCD_AUTOScan_Dir(u8 dir) {
u16 regval=0;
u16 dirreg=0;
switch(dir) {
case L2R_U2D://从左到右 从上到下
regval|=(0<<7)|(0<<6)|(0<<5); break;
case L2R_D2U://从左到右 从下到上
regval|=(1<<7)|(0<<6)|(0<<5); break;
case R2L_U2D://从右到左 从上到下
regval|=(0<<7)|(1<<6)|(0<<5); break;
case R2L_D2U://从右到左 从下到上
regval|=(1<<7)|(1<<6)|(0<<5); break;
case U2D_L2R://从上到下 从左到右
regval|=(0<<7)|(0<<6)|(1<<5); break;
case U2D_R2L://从上到下 从右到左
regval|=(0<<7)|(1<<6)|(1<<5); break;
case D2U_L2R://从下到上 从左到右
regval|=(1<<7)|(0<<6)|(1<<5);break;
case D2U_R2L://从下到上 从右到左
regval|=(1<<7)|(1<<6)|(1<<5); break;
}
//设置扫描方法
dirreg=0X36;
regval|=0X08;
LCD_WriteReg(dirreg,regval);
LCD_CMD=setxcmd; //x的最小值
LCD_DATA=0;
LCD_DATA=0;//x的最大值
LCD_DATA=(lcd_width-1)>>8;
LCD_DATA=(lcd_width-1)&0XFF;
LCD_CMD=setycmd; //y的最小值
LCD_DATA=0;
LCD_DATA=0;//y的最大值
LCD_DATA=(lcd_height-1)>>8;
LCD_DATA=(lcd_height-1)&0XFF;
}
/****************************************************************************
* 名称: void LCD_Display_Dir(u8 dir)
* 功能:这只LCD显示方向
* 入口参数:dir: 0,竖屏 1,横屏
****************************************************************************/
void LCD_Display_Dir(u8 dir) {
switch (dir) {
case L2R_U2D:
case L2R_D2U:
case R2L_U2D:
case R2L_D2U:
//先左右后上下的是竖屏
lcd_width=240;
lcd_height=320;
break;
default:
//先上下后左右的是横屏显示
lcd_width=320;
lcd_height=240;
break;
}
LCD_AUTOScan_Dir(dir); //设置扫描方向
}
/****************************************************************************
* 名称: u16 LCD_GetPoint(u16 x,u16 y)
* 读取某点的颜色值
* 入口参数:x:x坐标 y:y坐标
* 返回参数:此点的颜色
****************************************************************************/
u16 LCD_GetPoint(u16 x,u16 y) {
vu16 r=0,g=0,b=0;
if(x>=lcd_width||y>=lcd_height)
return 0; //超过了范围 直接返回
LCD_SetCursor(x,y);
LCD_CMD = read_gramcmd; //9341 发送读GRAM指令
if(LCD_DATA)
r=0;
lcdm_delay(2);
r=LCD_DATA; //实际坐标颜色
lcdm_delay(2);
b=LCD_DATA;
g=r&0XFF; //对于9341第一次读取的是RG的值 R在前 G在后 个占8位
g<<=8;
return (((r>>11)<<11)|((g>>10)<<5)|(b>>11)); //ILI9341需要公式转换一下}
/****************************************************************************
* 名称: void LCD_DrawPoint(u16 x,u16 y)
* 功能:画点(在该点写入画笔的颜色)
* 入口参数:x:x坐标 y:y坐标
* 返回参数:无
* 说明 RUSH_COLOR:此点的颜色值
****************************************************************************/
void LCD_DrawPoint(u16 x,u16 y) {
LCD_SetCursor(x,y); //设置光标位置
LCD_WriteRAM_Prepare(); //开始写入GRAM
LCD_DATA=BRUSH_COLOR;
}
/****************************************************************************
* 名称: void LCD_Color_DrawPoint(u16 x,u16 y,u16 color)
* 功能:在设置的坐标除画相应颜色(在该点写入自定义颜色)
* 入口参数:x:x坐标 y:y坐标
color 此点的颜色值
*说明:color:写入此点的颜色值 UCGUI调用该函数
****************************************************************************/
void LCD_Color_DrawPoint(u16 x,u16 y,u16 color) {
LCD_CMD=setxcmd;
LCD_DATA=(x>>8);
LCD_DATA=(x&0XFF);
LCD_CMD=setycmd;
LCD_DATA=(y>>8);
LCD_DATA=(y&0XFF);
LCD_CMD=write_gramcmd;
LCD_DATA=color;
}
/****************************************************************************
* 名称: void LCD_Set_Window(u16 sx,u16 sy,u16 width,u16 height)
* 功能:设置窗口,最后并设置画点坐标到窗口左上角(sx,sy)
*入口参数:sx,sy:窗口起始坐标(左上角) width,height:窗口宽度和高度
*说明:窗口大小width*height.
****************************************************************************/
void LCD_Set_Window(u16 sx,u16 sy,u16 width,u16 height) {
width=sx+width-1;
height=sy+height-1;
LCD_CMD=setxcmd;
LCD_DATA=(sx>>8);
LCD_DATA=(sx&0XFF);
LCD_DATA=(width>>8);
LCD_DATA=(width&0XFF);
LCD_CMD=setycmd;
LCD_DATA=(sy>>8);
LCD_DATA=(sy&0XFF);
LCD_DATA=(height>>8);
LCD_DATA=(height&0XFF);
}
/****************************************************************************
* 名称: void LCD_Clear(u16 color)
* 功能:清屏函数
* 入口参数:color: 要清屏的填充色
****************************************************************************/
void LCD_Clear(u16 color) {
u32 i=0;
u32 pointnum=0;
pointnum=lcd_width*lcd_height; //得到LCD总点数
LCD_SetCursor(0x00,0x00); //设置光标位置
LCD_WriteRAM_Prepare(); //开始写入GRAM
for(i=0;i<pointnum;i++) {
LCD_DATA=color;
}
}
/****************************************************************************
* 名称: void LCD_Fill_onecolor(u16 sx,u16 sy,u16 ex,u16 ey,u16 color)
*功能:在指定的区域内填充单个颜色
* 入口参数:(sx,sy),(ex,ey):填充矩形对角坐标 color:要填充的颜色
*说明:区域大小为:(ex-sx+1)*(ey-sy+1)
****************************************************************************/
void LCD_Fill_onecolor(u16 sx,u16 sy,u16 ex,u16 ey,u16 color) {
u16 i,j;
u16 nlen=0;
nlen=ex-sx+1;
for(i=sy;i<=ey;i++) {
LCD_SetCursor(sx,i); //设置光标位置
LCD_WriteRAM_Prepare(); //开始写入GRAM
for(j=0;j<nlen;j++)LCD_DATA=color; //设置光标位置
}
}
/****************************************************************************
* 名称: void LCD_Draw_Picture(u16 sx,u16 sy,u16 ex,u16 ey,u16 *color)
* 功能:在指定区域内画入图片
* 入口参数:(sx,sy),(ex,ey):填充矩形对角坐标 color:要填充的图片像素颜色数组
*说明:区域大小为:(ex-sx+1)*(ey-sy+1)
****************************************************************************/
void LCD_Draw_Picture(u16 sx,u16 sy,u16 ex,u16 ey,u16 *color) {
u16 height,width;
u16 i,j;
width=ex-sx+1; //得到图片的宽度
height=ey-sy+1; //得到图片的高度
for(i=0;i<height;i++) {
LCD_SetCursor(sx,sy+i); //设置光标位置
LCD_WriteRAM_Prepare(); //开始写入GRAM
for(j=0;j<width;j++)LCD_DATA=color[i*height+j];//写入颜色值
}
}
/****************************************************************************
* 名称: void LCD_Draw_Line(u16 x1, u16 y1, u16 x2, u16 y2)
* 功能:画线
* 入口参数:x1,y1:起点坐标 x2,y2:终点坐标
* 说明:有三种情况的画线,水平线、垂直线与斜线(画线、划矩形与画圆参考网上代码)
************************2****************************************************/
void LCD_Draw_Line(u16 x1, u16 y1, u16 x2, u16 y2) {
u16 i;
int xm1=0,ym2=0,model_x,model_y,model, mcx,mcy,mRow,mCol;
model_x=x2-x1; //计算直线的模 画线坐标增量
model_y=y2-y1;
mRow=x1;
mCol=y1;
if(model_x>0)mcx=1;
else if(model_x==0)mcx=0; //垂直线
else {mcx=-1;model_x=-model_x;}
if(model_y>0)mcy=1;
else if(model_y==0)mcy=0; //水平线
else{mcy=-1;model_y=-model_y;}
if( model_x>model_y)model=model_x;
else model=model_y;
for(i=0;i<=model+1;i++ ) //画线输出
{
LCD_DrawPoint(mRow,mCol);
xm1+=model_x ;
ym2+=model_y ;
if(xm1>model) {
xm1-=model;
mRow+=mcx;
}
if(ym2>model) {
ym2-=model;
mCol+=mcy;
}
}
}
/****************************************************************************
* 名称: void LCD_Draw_Rectangle(u16 x1, u16 y1, u16 x2, u16 y2)
* 功能:画矩形
* 入口参数:(x1,y1),(x2,y2):矩形的对角坐标
****************************************************************************/
void LCD_Draw_Rectangle(u16 x1, u16 y1, u16 x2, u16 y2) {
LCD_Draw_Line(x1,y1,x2,y1);
LCD_Draw_Line(x1,y1,x1,y2);
LCD_Draw_Line(x1,y2,x2,y2);
LCD_Draw_Line(x2,y1,x2,y2);
}
/****************************************************************************
* 名称: void LCD_Draw_Circle(u16 x0,u16 y0,u8 r)
*功能:字指定位置画一个指定大小的圆
* 入口参数:(x,y):中心点 r :半径
****************************************************************************/
void LCD_Draw_Circle(u16 x0,u16 y0,u8 r) {
int a,b;
int di;
a=0;b=r;
di=3-(r<<1); //判断下个点位置的标志
while(a<=b) {
LCD_DrawPoint(x0+a,y0-b);
LCD_DrawPoint(x0+b,y0-a);
LCD_DrawPoint(x0+b,y0+a);
LCD_DrawPoint(x0+a,y0+b);
LCD_DrawPoint(x0-a,y0+b);
LCD_DrawPoint(x0-b,y0+a);
LCD_DrawPoint(x0-a,y0-b);
LCD_DrawPoint(x0-b,y0-a);
a++;
if(di<0)di +=4*a+6; //使用Bresenham算法画圆
else {
di+=10+4*(a-b);
b--;
}
}
}
/****************************************************************************
* 名称: void LCD_DisplayChar(u16 x,u16 y,u8 num,u8 size)
* 功能:在指定位置显示一个字符
* 入口参数:x,y:起始坐标
word:要显示的字符:abcdefg1234567890...
size:字体大小 12/16/24
*说明:取字模参考网上取字模方式,改字模取模方向为先从上到下,再从左到右
****************************************************************************/
void LCD_DisplayChar(u16 x,u16 y,u8 word,u8 size) {
u8 bytenum,bytedata, a,b;
u16 ymid=y;
if(size==12) bytenum=12; // 判断各个字体子啊字库数组中占的字节数
else if(size==16) bytenum=16;
else if(size==24) bytenum=36;
else return;
word=word-' '; //得到偏移后的值 因为空格之前的字符没在font.h中的数组里面
for(b=0;b<bytenum;b++) {
if(size==12)bytedata=char_1206[word][b]; //调用1206字体
else if(size==16)bytedata=char_1608[word][b]; //调用1608字体
else if(size==24)bytedata=char_2412[word][b]; //调用2412字体
else return; //没有的字符数组 没字符字库
for(a=0;a<8;a++) {
if(bytedata&0x80)LCD_Color_DrawPoint(x,y,BRUSH_COLOR);
else LCD_Color_DrawPoint(x,y,BACK_COLOR);
bytedata<<=1;
y++;
if(y>=lcd_height)return; //超区域 退出函数
if((y-ymid)==size) {
y=ymid;
x++;
if(x>=lcd_width)return; //超区域 退出函数
break;
}
}
}
}
/****************************************************************************
* 名称: void LCD_DisplayOtherChar(u16 x,u16 y,u8 num,u8 size)
* 功能:在指定位置显示一个除ASCII之外的字符
* 入口参数:x,y:起始坐标 word:要显示的字符 0:摄氏度标志 size:字体大小 12/16/24
* 说明:取字模参考网上 该字模取模方向为先从上到下 再从左到右
****************************************************************************/
void LCD_DisplayOTherChar(u16 x,u16 y,u8 word,u8 size) {
u8 bytenum,bytedata, a,b;
u16 ymid=y;
if(size==12) bytenum=24; // 判断各个字体子啊字库数组中占的字节数
else if(size==16) bytenum=32;
else if(size==24) bytenum=72;
else return;
for(b=0;b<bytenum;b++) {
if(size==12)bytedata=otherChar_1212[word][b]; //调用1212字体
else if(size==16)bytedata=otherChar_1616[word][b]; //调用1616字体
else if(size==24)bytedata=otherChar_2424[word][b]; //调用2424字体
else return; //没有的字符数组,没字符字库
for(a=0;a<8;a++) {
if(bytedata&0x80)LCD_Color_DrawPoint(x,y,BRUSH_COLOR);
else LCD_Color_DrawPoint(x,y,BACK_COLOR);
bytedata<<=1;
y++;
if(y>=lcd_height)return; //超区域 退出函数
if((y-ymid)==size) {
y=ymid;
x++;
if(x>=lcd_width)return; //超区域 退出函数
break;
}
}
}
}
//m^n函数
//返回值:m^n次方
u32 LCD_Pow(u8 m,u8 n) {
u32 mid=1;
while(n--)mid*=m;
return mid;
}
/****************************************************************************
* 名称: : void LCD_DisplayNum(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode)
* 功能: 在指定位置显示一串数字
* 入口参数:x,y:起始坐标
num:数值(0~999999999);
len:长度(即要显示的位数)
size:字体大小
mode: 0:高位为0 不显示
1:高位为0显示0
****************************************************************************/
void LCD_DisplayNum(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode) {
u8 t,numtemp;
u8 end0=0;
for(t=0;t<len;t++) {
numtemp=(num/LCD_Pow(10,len-t-1))%10;
if(end0==0&&t<(len-1)) {
if(numtemp==0) {
if(mode)LCD_DisplayChar(x+(size/2)*t,y,'0',size);
else LCD_DisplayChar(x+(size/2)*t,y,' ',size);
continue;
}else end0=1;
}
LCD_DisplayChar(x+(size/2)*t,y,numtemp+'0',size);
}
}
/****************************************************************************
* 名称: void LCD_DisplayNum_color(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode)
* 功能:在指定位置显示一串自定义颜色的数字
* 入口参数: x,y:起始坐标
num:数值(0~999999999);
len:长度(即要显示的位数)
size:字体大小
mode: 0:高位为0 不显示 1:高位为0显示0
brushcolor:自定义画笔颜色
backcolor:自定义背景颜色
****************************************************************************/
void LCD_DisplayNum_color(u16 x,u16 y,u32 num,u8 len,u8 size,u8 mode,u16 brushcolor,u16 backcolor) {
u16 bh_color,bk_color;
bh_color=BRUSH_COLOR; //暂存画笔颜色
bk_color=BACK_COLOR; //暂存背景颜色
BRUSH_COLOR=brushcolor;
BACK_COLOR=backcolor;
LCD_DisplayNum(x,y,num,len,size,mode);
BRUSH_COLOR=bh_color; //不改变系统颜色
BACK_COLOR=bk_color;
}
/****************************************************************************
* 名称: void LCD_DisplayString(u16 x,u16 y,u8 size,u8 *p)
* 功能:显示字符串
* 入口参数:x,y:起始坐标
* size:字体大小 *p:字符串起始地址
****************************************************************************/
void LCD_DisplayString(u16 x,u16 y,u8 size,u8 *p) {
while((*p<='~')&&(*p>=' ')) //判断是不是非法字符! {
LCD_DisplayChar(x,y,*p,size);
x+=size/2;
if(x>=lcd_width) break;
p++;
}
}
/****************************************************************************
*名称: : void LCD_DisplayString(u16 x,u16 y,u8 size,u8 *p)
* 功能: 显示自定义字符串
* 入口参数:x,y:起始坐标
* width,height:区域大小
* size:字体大小
* *p:字符串起始地址
* brushcolor:自定义画笔颜色
* backcolor:自定义背景颜色
****************************************************************************/
void LCD_DisplayString_color(u16 x,u16 y,u8 size,u8 *p,u16 brushcolor,u16 backcolor) {
u16 bh_color,bk_color;
bh_color=BRUSH_COLOR; //暂存画笔颜色
bk_color=BACK_COLOR; //暂存背景颜色
BRUSH_COLOR=brushcolor;
BACK_COLOR=backcolor;
LCD_DisplayString(x,y,size,p);
BRUSH_COLOR=bh_color; //不改变系统颜色
BACK_COLOR=bk_color;
}
//配置FSMC可变静态存储控制器
void LCD_FSMC_Config() {
GPIO_InitTypeDef GPIO_InitStructure;
FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure;
FSMC_NORSRAMTimingInitTypeDef readWriteTiming;
FSMC_NORSRAMTimingInitTypeDef writeTiming;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD|RCC_AHB1Periph_GPIOE|RCC_AHB1Periph_GPIOF|RCC_AHB1Periph_GPIOG, ENABLE);//使能PD PE PF PG时钟
RCC_AHB3PeriphClockCmd(RCC_AHB3Periph_FSMC,ENABLE);//使能FSMC时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //PF10 推挽输出 控制背光
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化 //
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOD, &GPIO_InitStructure); //初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PG2,FSMC_A12
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //¸´ÓÃÊä³ö
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //ÉÏÀ
GPIO_Init(GPIOG, &GPIO_InitStructure); //³õʼ»¯
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PG12
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化
GPIO_PinAFConfig(GPIOD,GPIO_PinSource0,GPIO_AF_FSMC);//PD0,AF12
GPIO_PinAFConfig(GPIOD,GPIO_PinSource1,GPIO_AF_FSMC);//PD1,AF12
GPIO_PinAFConfig(GPIOD,GPIO_PinSource4,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource5,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource8,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource9,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource10,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource14,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOD,GPIO_PinSource15,GPIO_AF_FSMC);//PD15,AF12
GPIO_PinAFConfig(GPIOE,GPIO_PinSource7,GPIO_AF_FSMC); //PE7,AF12
GPIO_PinAFConfig(GPIOE,GPIO_PinSource8,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource9,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource10,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource11,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource12,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource13,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource14,GPIO_AF_FSMC);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource15,GPIO_AF_FSMC);//PE15,AF12
GPIO_PinAFConfig(GPIOG,GPIO_PinSource2,GPIO_AF_FSMC);//PF12,AF12
GPIO_PinAFConfig(GPIOG,GPIO_PinSource12,GPIO_AF_FSMC);
readWriteTiming.FSMC_AddressSetupTime = 0XF; //地址建立时间(ADDSET)为16个HCLK 1/168M=6ns*16=96ns > 90
readWriteTiming.FSMC_AddressHoldTime = 0x00; //地址保持时间(ADDHLD)模式A未用到
readWriteTiming.FSMC_DataSetupTime = 60; //数据存储时间为60个HCLK =6*60=360ns > 255
readWriteTiming.FSMC_BusTurnAroundDuration = 0x00;
readWriteTiming.FSMC_CLKDivision = 0x00;
readWriteTiming.FSMC_DataLatency = 0x00;
readWriteTiming.FSMC_AccessMode = FSMC_AccessMode_A; //模式A
writeTiming.FSMC_AddressSetupTime = 3; //地址建立时间(ADDSET)为3个HCLK =18ns > 15
writeTiming.FSMC_AddressHoldTime = 0x00; //地址保持时间(ADDHLD) 模式A不使用
writeTiming.FSMC_DataSetupTime = 2; //数据保存时间为6ns*3个HCLK=18ns > 15
writeTiming.FSMC_BusTurnAroundDuration = 0x00;
writeTiming.FSMC_CLKDivision = 0x00;
writeTiming.FSMC_DataLatency = 0x00;
writeTiming.FSMC_AccessMode = FSMC_AccessMode_A; //模式A
FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM4;// 使用E4,也就对应BTCR[6],[7]
FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Disable; // 不复用数据地址
FSMC_NORSRAMInitStructure.FSMC_MemoryType =FSMC_MemoryType_SRAM;// FSMC_MemoryType_SRAM; //SRAM
FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;//存储器数据宽度为16bit
FSMC_NORSRAMInitStructure.FSMC_BurstAccessMode =FSMC_BurstAccessMode_Disable;// FSMC_BurstAccessMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;
FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait=FSMC_AsynchronousWait_Disable;
FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable;
FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;
FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable; //存储器写使能
FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable;
FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Enable; // 读写使用不同的时序
FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable;
FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &readWriteTiming; //读写时序
FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &writeTiming; //写时序
FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure); //初始化FSMC配置
FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM4, ENABLE); // 使能BANK1
delay_ms(50); // delay 50 ms
}
//初始化lcd
void LCD_Init(void) {
LCD_FSMC_Config();
//尝试9341 ID的读取
LCD_CMD=0XD3;
lcd_id=LCD_DATA; //dummy read
lcd_id=LCD_DATA; //读到0X00
lcd_id=LCD_DATA; //读取93
lcd_id<<=8;
lcd_id|=LCD_DATA; //读取41
LCD_CMD=0xCF;
LCD_DATA=0x00;
LCD_DATA=0xC1;
LCD_DATA=0X30;
LCD_CMD=0xED;
LCD_DATA=0x64;
LCD_DATA=0x03;
LCD_DATA=0X12;
LCD_DATA=0X81;
LCD_CMD=0xE8;
LCD_DATA=0x85;
LCD_DATA=0x10;
LCD_DATA=0x7A;
LCD_CMD=0xCB;
LCD_DATA=0x39;
LCD_DATA=0x2C;
LCD_DATA=0x00;
LCD_DATA=0x34;
LCD_DATA=0x02;
LCD_CMD=0xF7;
LCD_DATA=0x20;
LCD_CMD=0xEA;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_CMD=0xC0; //Power control
LCD_DATA=0x1B; //VRH[5:0]
LCD_CMD=0xC1; //Power control
LCD_DATA=0x01; //SAP[2:0];BT[3:0]
LCD_CMD=0xC5; //VCM control
LCD_DATA=0x30; //3F
LCD_DATA=0x30; //3C
LCD_CMD=0xC7; //VCM control2
LCD_DATA=0XB7;
LCD_CMD=0x36; // Memory Access Control
LCD_DATA=0x48;
LCD_CMD=0x3A;
LCD_DATA=0x55;
LCD_CMD=0xB1;
LCD_DATA=0x00;
LCD_DATA=0x1A;
LCD_CMD=0xB6; // Display Function Control
LCD_DATA=0x0A;
LCD_DATA=0xA2;
LCD_CMD=0xF2; // 3Gamma Function Disable
LCD_DATA=0x00;
LCD_CMD=0x26; //Gamma curve selected
LCD_DATA=0x01;
LCD_CMD=0xE0; //Set Gamma
LCD_DATA=0x0F;
LCD_DATA=0x2A;
LCD_DATA=0x28;
LCD_DATA=0x08;
LCD_DATA=0x0E;
LCD_DATA=0x08;
LCD_DATA=0x54;
LCD_DATA=0XA9;
LCD_DATA=0x43;
LCD_DATA=0x0A;
LCD_DATA=0x0F;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_CMD=0XE1; //Set Gamma
LCD_DATA=0x00;
LCD_DATA=0x15;
LCD_DATA=0x17;
LCD_DATA=0x07;
LCD_DATA=0x11;
LCD_DATA=0x06;
LCD_DATA=0x2B;
LCD_DATA=0x56;
LCD_DATA=0x3C;
LCD_DATA=0x05;
LCD_DATA=0x10;
LCD_DATA=0x0F;
LCD_DATA=0x3F;
LCD_DATA=0x3F;
LCD_DATA=0x0F;
LCD_CMD=0x2B;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_DATA=0x01;
LCD_DATA=0x3f;
LCD_CMD=0x2A;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_DATA=0x00;
LCD_DATA=0xef;
LCD_CMD=0x11; //Exit Sleep
delay_ms(120);
LCD_CMD=0x29; //display on
LCD_Display_Dir(U2D_R2L); //初始化为 横屏
LCD_BACK=1; //点亮背光
LCD_Clear(WHITE);
}
void LCD_DisplayMyname(u16 x,u16 y) {
u8 bytenum,bytedata, a,b;
u16 ymid=y;
bytenum = sizeof(gao);//
for(b=0;b<bytenum;b++) {
bytedata=gao[b]; //调用1206字体
//没有的字符数组 没字符字库
for(a=0;a<8;a++) {
if(bytedata&0x80)LCD_Color_DrawPoint(x,y,RED);
else LCD_Color_DrawPoint(x,y,YELLOW);
bytedata<<=1;
y++;
if(y>=lcd_height)return; //超区域 退出函数
if((y-ymid)==32) {
y=ymid;
x++;
if(x>=lcd_width)return; //超区域 退出函数
break;
}
}
}
}
void LCD_DisplayTu1(u16 x,u16 y) {
u8 bytenum,bytedata, a,b;
u16 ymid=y;
bytenum = sizeof(biao1);//
for(b=0;b<bytenum;b++) {
bytedata=biao1[b]; //调用1206字体
//没有的字符数组 没字符字库
for(a=0;a<8;a++) {
if(bytedata&0x80)LCD_Color_DrawPoint(x,y,WHITE);
else LCD_Color_DrawPoint(x,y,BLUE);
bytedata<<=1;
y++;
if(y>=lcd_height)return; //超区域 退出函数
if((y-ymid)==32) {
y=ymid;
x++;
if(x>=lcd_width)return; //超区域 退出函数
break;
}
}
}
}
void LCD_DisplayTu2(u16 x,u16 y) {
u8 bytenum,bytedata, a,b;
u16 ymid=y;
bytenum = sizeof(biao2);//
for(b=0;b<bytenum;b++) {
bytedata=biao2[b]; //调用1206字体
//没有的字符数组 没字符字库
for(a=0;a<8;a++) {
if(bytedata&0x80)LCD_Color_DrawPoint(x,y,WHITE);
else LCD_Color_DrawPoint(x,y,BLUE);
bytedata<<=1;
y++;
if(y>=lcd_height)return; //超区域 退出函数
if((y-ymid)==32) {
y=ymid;
x++;
if(x>=lcd_width)return; //超区域 退出函数
break;
}
}
}
}
cfont.h
#ifndef __CFONT_H
#define __CFONT_H
//字库均来源于网络工具生成 此处略
//摄氏度符号
const unsigned char otherChar_1212[1][24] = {{0x00,0x00,0x60,0x00,0x60,0x00,0x00,0x00,0x1F,0x80,0x20,0x40,0x20,0x40,0x20,0x40,0x20,0x40,0x20,0xC0,0x11,0x80,0x00,0x00}};
const unsigned char otherChar_1616[1][32] = {{0x00,0x00,0x30,0x00,0x48,0x00,0x30,0x00,0x00,0x00,0x03,0xF0,0x0E,0x18,0x08,0x0C,0x10,0x04,0x10,0x04,0x10,0x04,0x10,0x04,0x08,0x0C,0x0C,0x38,0x00,0x00,0x00,0x00}};
ds18b20.h
#ifndef S3C_DS_H
#define S3C_DS_H
extern void DS18B20_Init(void);
extern void get_temperature(char *buf);
#endif
ds18b20.c
#include "stm32f4xx.h"
#include "ds18b20.h"
#include "delay.h"
extern void gpio_out_state(int);
extern int gpio_input_state(void);
int DS1820_Reset(void); //DS1820 复位
void DS1820_WriteData(char wData); //写数据到 DS1820
/**********************************************************
*DS1820 复位及存在检测(通过存在脉冲可以判断 DS1820 是否损坏)
*函数名称:DS1820_Reset()
*说明:函数返回一个位标量(0 或 1)flag=0 存在,反之 flag=1 不存在
**********************************************************/
int DS1820_Reset(void) {
int flag;
gpio_out_state(0);
//延时 480 微秒,产生复位脉冲
delay_us(480);
gpio_out_state(1);
//延时 80 微秒对总线采样
delay_us(80);
flag = gpio_input_state();
//对数据脚采样
delay_us(400); //延时 400 微秒等待总线恢复
return flag; //根据 flag 的值可知 DS1820 是否存在或损坏 ,可加声音告警提示 DS1820 故障
}
/**********************************************************
*写数据到 DS1820
*函数名称:DS1820_WriteData()
**********************************************************/
void DS1820_WriteData(char wData) {
char i;
for(i = 8; i > 0; i--) {
gpio_out_state(0); //拉低总线,产生写信号
delay_us(4); //延时 4us
gpio_out_state(wData & 0x01); //发送 1 位
delay_us(60); //延时 60us,写时序至少要 60us
gpio_out_state(1); //释放总线,等待总线恢复
wData >>= 1; //准备下一位数据的传送
}
}
/**********************************************************
*DS18B20 初始化
*函数名称:DS1820_WriteData()
*说明:本初始化程序可以不要,因为 18B20 在出厂时就被配置为 12 位精度了
**********************************************************/
void DS18B20_Init(void) {
DS1820_Reset();
DS1820_WriteData(0xCC); // 跳过 ROM
DS1820_WriteData(0x4E); // 写暂存器
DS1820_WriteData(0x20); // 往暂存器的第三字节中写上限值
DS1820_WriteData(0x00); // 往暂存器的第四字节中写下限值
DS1820_WriteData(0x7F); // 将配置寄存器配置为 12 位精度
DS1820_Reset();
}
/**********************************************************
*从 DS1820 中读出数据
*函数名称:DS1820_ReadData()
**********************************************************/
char DS1820_ReadData(void) {
char i,TmepData = 0;
for(i = 8; i > 0; i--) {
TmepData >>= 1;
gpio_out_state(0); //拉低总线,产生读信号
delay_us(4); //延时 4us
gpio_out_state(1); //释放总线,准备读数据
delay_us(8); //延时 8 微秒读数据
if(gpio_input_state())
TmepData |= 0x80;
delay_us(60); //延时 60us
gpio_out_state(1); //拉高总线,准备下一位数据的读取.
}
return TmepData; //返回读到的数据
}
/**********************************************************
*转换子程序
**********************************************************/
void tem_to_string(char *buf, char temperature[]) {
unsigned char temp_data,temp_data_2;
unsigned short TempDec; //用来存放 4 位小数
temp_data = temperature[1];
temp_data &= 0xf8; //取高 4 位
if(temp_data == 0xf8) { //判断是正温度还是负温度读数
//负温度读数求补,取反加 1,判断低 8 位是否有进位
if(temperature[0]==0) { //有进位,高 8 位取反加 1
temperature[0]=~temperature[0]+1;
temperature[1]=~temperature[1]+1;
}else { //没进位,高 8 位不加 1
temperature[0]=~temperature[0]+1;
temperature[1]=~temperature[1];
}
}
//温度格式 temperature[1]:[xxxxAAAA] AAAA 温度的高4位
//温度格式 temperature[0]:[BBBBCCCC] BBBB 温度的低4位 CCCC小数(乘以0.0625得到的是温度)
temp_data = temperature[1]<<4; //取高字节低 4 位(温度读数高 4 位),注意此时是 12 位精度
temp_data_2 = temperature[0]>>4; //取低字节高 4 位(温度读数低 4 位),注意此时是 12 位精度
temp_data = temp_data | temp_data_2; //组合成完整数据
buf[0] = temp_data / 100 + 0x30; //取百位转换为 ASCII 码
buf[1] = (temp_data % 100) / 10 + 0x30; //取十位转换为 ASCII 码
buf[2] = (temp_data % 100 ) % 10 + 0x30; //取个位转换为 ASCII 码
buf[3] = '.';
#if 0
1111 = 15;
2 ^ 3 + 2 ^ 2 + 2 ^ 1 + 2 ^ 0 = 15
1111 = (2 ^ 3 + 2 ^ 2 + 2 ^ 1 + 2 ^ 0) * 0.0625 = 15 * 0.0625
#endif
temperature[0] &= 0x0f; //取小数位转换为 ASCII 码
TempDec = temperature[0] * 625; //625=0.0625*10000,表示小数部分,扩大 1 万倍 ,方便显示
buf[4] = TempDec / 1000 + 0x30; //取小数十分位转换为 ASCII 码
buf[5] = (TempDec % 1000) / 100 + 0x30; //取小数百分位转换为 ASCII 码
buf[6] = ((TempDec % 1000) % 100) / 10 + 0x30; //取小数千分位转换为 ASCII 码
buf[7] = ((TempDec % 1000) % 100) % 10 + 0x30; //取小数万分位转换为 ASCII 码
buf[8] = '\0';
}
void get_temperature(char *buf) {
int i;
char temperature[2]; //存放温度数据
DS1820_Reset(); //复位
DS1820_WriteData(0xcc); //跳过 ROM 命令
DS1820_WriteData(0x44); //温度转换命令
DS1820_Reset(); //复位
DS1820_WriteData(0xcc); //跳过 ROM 命令
DS1820_WriteData(0xbe); //读 DS1820 温度暂存器命令
for (i=0;i<2;i++){
temperature[i] = DS1820_ReadData(); //采集温度
}
DS1820_Reset(); //复位,结束读数据
tem_to_string(buf, temperature);
delay_us(50);
}
dht11.h
#ifndef __DHT_H
#define __DHT_H
#include "stm32f4xx_conf.h"
extern void dht_init(void);
extern void dht_get_data(char *buf);
#endif
dht11.c
#include "dht11.h"
#include "delay.h"
#include "bitband.h"
void dht_init(void) {
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
}
void dht_gpio_out(void) {
GPIO_InitTypeDef Gpio_Value;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
Gpio_Value.GPIO_Mode = GPIO_Mode_OUT;
Gpio_Value.GPIO_OType = GPIO_OType_PP;
Gpio_Value.GPIO_Pin = GPIO_Pin_4;
Gpio_Value.GPIO_PuPd = GPIO_PuPd_NOPULL;
Gpio_Value.GPIO_Speed = GPIO_Fast_Speed;
GPIO_Init(GPIOA, &Gpio_Value);
}
void dht_gpio_in(void) {
GPIO_InitTypeDef Gpio_Value;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
Gpio_Value.GPIO_Mode = GPIO_Mode_IN;
Gpio_Value.GPIO_Pin = GPIO_Pin_4;
Gpio_Value.GPIO_PuPd = GPIO_PuPd_NOPULL;
Gpio_Value.GPIO_Speed = GPIO_Fast_Speed;
GPIO_Init(GPIOA, &Gpio_Value);
}
void dht_output_state(int state) {
dht_gpio_out();
if(state)
PAOut(4) = 1;
else
PAOut(4) = 0;
}
int dht_input_state(void) {
dht_gpio_in();
return PAIn(4);
}
void dht_get_data(char *buf) {
char i;
char tmp = 0;
dht_output_state(0);
delay_ms(20);
dht_output_state(1);
while(dht_input_state());
while(!dht_input_state());
for(i = 0; i < 40; i++) {
while(dht_input_state());
while(!dht_input_state());
delay_us(40);
tmp <<= 1;
if(dht_input_state())
tmp |= 1;
if((i + 1) % 8 == 0)// 7 15 23 31 {
buf[i / 8] = tmp;
tmp = 0;
}
}
dht_output_state(1);
}
STM32 f407 温湿度采集报警的更多相关文章
- 嵌入式系统及应用课程设计——基于STM32的温湿度监测系统
大三上学期期末总结,嗯,没错上学期,写在新学期开始,hhh. 上学期学了一门嵌入式系统及应用的课程,期末的课程设计题目是基于STM32的温湿度监测系统. 记得刚开始做课程设计的时候,听说先设计画出原理 ...
- 温湿度监测系统设计:基于 STM32 的温湿度变送器的设计与实现
前言:这个是2018年上半年完成的,这里只贴出硬件设计部分,软件设计部分可以看上位机说明书. 设计总说明 随着科学技术的不断发展,高集成度.高精度.高可靠性的一体化温湿度变送器开始 得到广泛的应用.同 ...
- STM32读取温湿度传感器DHT11和DHT21(AM2301)系列问题
1.DHT11和DHT21传感器 这两种传感器都是奥松公司的产品,具体的传感器说明书在其官网上有(www.aosong.com). DHT11 数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合 ...
- 基于FSIOT_A 实验平台SAM3S4B cortex-M3的温湿度采集
作者:卢老师,华清远见嵌入式学院讲师. DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器.它应用专用的数字模块采集技术和温湿度传感器技术,确保产品具有极高的可靠性与卓越的长期稳 ...
- [置顶]
STM32的ADC1采集多条通道,可以不使用DMA功能吗?
类似的问题 为什么我采集5条通道的电压,而采集到的值却都是第一条的呢? 我什么时候需要使用DMA功能? Ⅰ关于ADC的一些知识 STM32的ADC是一种12位逐次逼近型的模拟数字转换器.它有多达18条 ...
- STM32—ADC多通道采集电压
文章目录 ADC详解 程序说明 函数主体 引脚配置 ADC和DMA配置 主函数 ADC详解 前面的博客中详细介绍了STM32中ADC的相关信息,这篇博客是对ADC内容的一个总结提升,ADC的详细介绍: ...
- 电信NB-IOT的温湿度采集器开发记录
1. 首先打开浏览器,登录电信商用服务器,上传profile文件 2. 上传编解码插件在,注意的是,上传编解码插件是电信测试用服务器平台(不同的网址),反正不明白电信搞啥幺蛾子,得两个地方去上传 3. ...
- 自学stm32就要记住入了这个“大坑”要耐得住寂寞
在现在的MCU使用量中,STM32绝对是翘楚!因为现在使用STM32开发产品的公司非常多,这主要得益于ST公司对自家MCU的大力推广,而且ST对自己MCU也配套了一系列开发软件,也有相应的硬件开发板供 ...
- 学习STM32单片机,从菜鸟到牛人就是这样简单(配视频资料)
我想说,为了学习单片机而去学习单片机的思路不对. 你问,如何系统地入门学习stm32? 本身就是一个错误的问题.假如你会使用8051 , 会写C语言,那么STM32本身并不需要刻意的学习. 你要考虑的 ...
随机推荐
- java构造代码块详解
一.简介 首先说一下,Java中有哪些代码块. 普通代码块 就是在方法后面使用"{}"括起来的代码片段,不能单独执行,必须调下其方法名才可以执行. 静态代码块 在类中使用stati ...
- 在使用 interface 声明一个接口时,只可以使用那个修饰符修饰该接口?
这是一个看似简单其实挺有深意的题目,答案应该大多数人都知道是什么,不过原理和原因相比很少有人仔细研究过.对于本题,我有三点说明,希望看到这个评论的人能从这三点中看到你以前没注意到的东西: ①接口的声 ...
- 【BZOJ3672】【UOJ#6】【NOI2014】随机数生成器
暴力出奇迹 原题: 2≤N,M≤5000 0≤Q≤50000 0≤a≤300 0≤b,c≤108 0≤x0<d≤108 1≤ui,vi≤N×M 恩首先容易看出来这个棋盘直接模拟搞出来就行了,不用 ...
- SpringJDBC——jdbcTemplate模板
一.定义 Spring框架对jdbc进行了封装,提供的一个JDBCTemplated对象简化jdbc开发. 使用步骤 1 导包spring-beans-5.0.0-RELEASE.jar,spring ...
- SQL相关语句
1.分类 数据定义语言(DDL),用来定义数据库.表 列 ,用到的关键字:create.alter.drop. 数据操作语言(DML),数据库进行更行的操作, insert.delete.update ...
- buckaroo 试用
我系统是mac 所以选择的是mac 的版本,官方是支持跨平台的. 安装 mac 版本安装 wget https://github.com/LoopPerfect/buckaroo/releases/d ...
- java 连接 hiveserver2 例子
启动了 hiveserver2 以后才能使用 程序连接 .目前的 使用的 是 server2 版本.和以前的版本驱动包名不同: package hadoop; import java.sql.Co ...
- bzoj 4660 Crazy Rabbit——LIS解决“相交”限制的思想
题目:https://www.lydsy.com/JudgeOnline/problem.php?id=4660 想到一个点可以用它与圆的两个切点表示.并想到可以把切点极角排序,那么就变成环上的一些区 ...
- py-day1-3 python基本数据类型
数据的基本类型: 数字:
- ML: 降维算法-PCA
PCA (Principal Component Analysis) 主成份分析 也称为卡尔胡宁-勒夫变换(Karhunen-Loeve Transform),是一种用于探索高维数据结 ...