kitti 数据集解析
1、KITTI数据集采集平台:
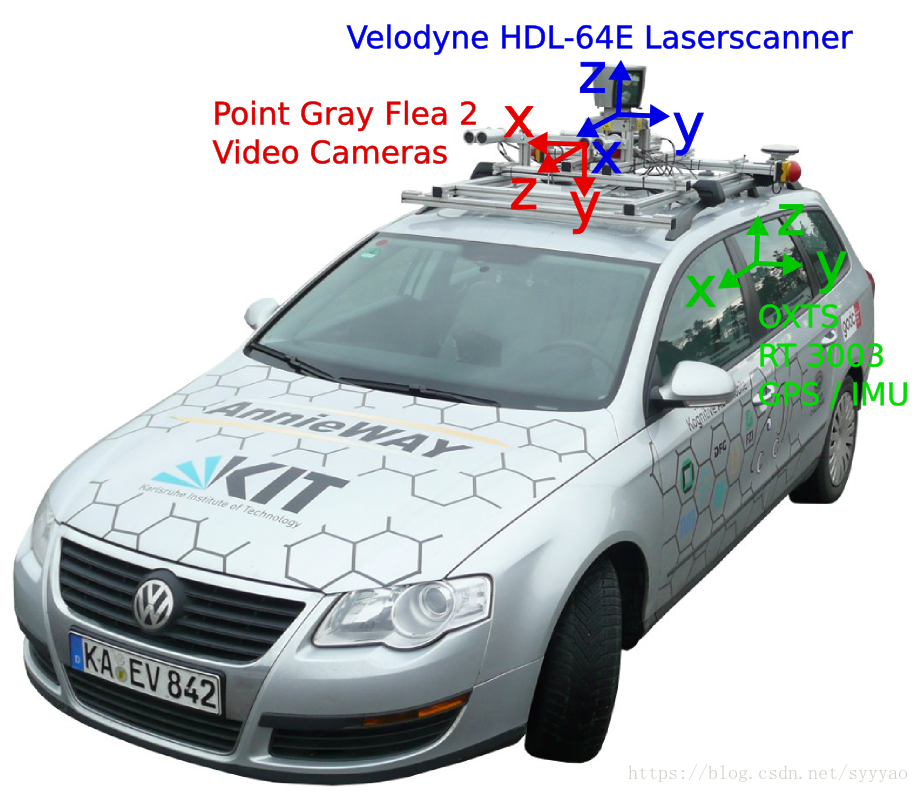
KITTI数据采集平台包括2个灰度摄像机,2个彩色摄像机,一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。坐标系转换原理参见click。KITTI提供的数据中都包含三者的标定文件,不需人工转换。

2、KITTI数据集,label文件解析:
Car 0.00 0 -1.84 662.20 185.85 690.21 205.03 1.48 1.36 3.51 5.35 2.56 58.84 -1.75
第1个字符串:代表物体类别
'Car', 'Van', 'Truck','Pedestrian', 'Person_sitting', 'Cyclist','Tram', 'Misc' or 'DontCare'
注意:’DontCare’ 标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。
第2个数:代表物体是否被截断,从0(非截断)到1(截断)浮动,其中truncated指离开图像边界的对象
第3个数:代表物体是否被遮挡,整数0,1,2,3表示被遮挡的程度
0:完全可见 1:小部分遮挡 2:大部分遮挡 3:完全遮挡(unknown)
第4个数:alpha,物体的观察角度,范围:-pi~pi
第5~8这4个数:物体的2维边界框,左上角和右下角的像素坐标
第9~11这3个数:3维物体的尺寸,高、宽、长(单位:米)
第12~14这3个数:3维物体的位置 x,y,z(在照相机坐标系下,单位:米)
第15个数:3维物体的空间方向:rotation_y,在照相机坐标系下,相对于y轴的旋转角,范围:-pi~pi
有些有第16个数:检测的置信度 , 仅用于结果:浮点,p / r曲线所需,越高越好
3、KITTI数据集,calib解析

要将Velodyne坐标中的点x投影到左侧的彩色图像中y:
使用公式:y = P2 * R0_rect *Tr_velo_to_cam * x
将Velodyne坐标中的点投影到右侧的彩色图像中:
使用公式:y = P3 * R0_rect *Tr_velo_to_cam * x
Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中
R0_rect *Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中,再修正
P2 * R0_rect *Tr_velo_to_cam * x :是将Velodyne坐标中的点x投影到编号为0的相机(参考相机)坐标系中,再修正,然后投影到编号为2的相机(左彩色相机)
注意:所有矩阵都存储在主行中,即第一个值对应于第一行。 R0_rect包含一个3x3矩阵,需要将其扩展为4x4矩阵,方法是在右下角添加1,在其他位置添加0。 Tr_xxx是一个3x4矩阵(R | t),需要以相同的方式扩展到4x4矩阵!
通过使用校准文件夹中的3x4投影矩阵,可以将相机坐标系中的坐标投影到图像中,对于提供图像的左侧彩色相机,必须使用P2。rotation_y和alpha之间的区别在于rotation_y直接在相机坐标中给出,而alpha也会考虑从相机中心到物体中心的矢量,以计算物体相对于相机的相对方向。 例如,沿着摄像机坐标系的X轴面向的汽车,无论它位于X / Z平面(鸟瞰图)中的哪个位置,它的rotation_y都为 0,而只有当此车位于相机的Z轴上时α才为零,当此车从Z轴移开时,观察角度α将会改变。
3、KITTI数据集,velodyne解析
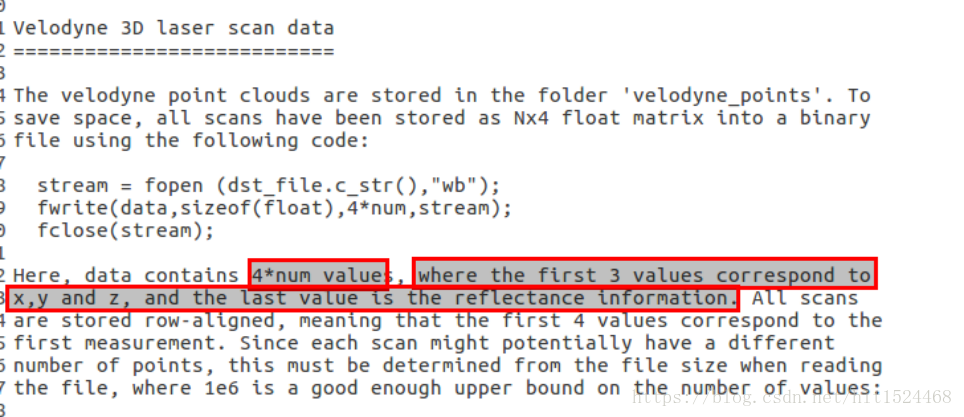
个坐标和反射率信息,即(x,y,z,r),并且数据类型为浮点数类型,如下图所示:
参考网址:
https://blog.csdn.net/cuichuanchen3307/article/details/80596689
https://blog.csdn.net/julialove102123/article/details/78432496
https://blog.csdn.net/hit1524468/article/details/79766805
kitti 数据集解析的更多相关文章
- kitti数据集标定文件解析
1.kitti数据采集平台 KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne64线3D激光雷达,4个光学镜头,以及1个GPS导航系统.图示为传感器的配置平面图, ...
- KITTI数据集格式说明
由于上一篇博客所提到的论文中的训练数据是KITTI的数据集,因此如果我想要用自己的数据集进行训练的话,就需要先弄清楚KITTI数据集的格式,在以下的网址找到了说明: 首先,数据描述中是这样的: 在以下 ...
- 激光相机数据融合(3)--KITTI数据集
KITTI数据集提供了双目图像,激光数据,和imu/gps位置信息,其中还包括了大量的算法.下载地址为:http://www.cvlibs.net/datasets/kitti/raw_data.ph ...
- KITTI数据集的使用——雷达与相机的数据融合
目录 目的 如何实现 kitti数据集简介 kitti数据集的raw_data 利用kitti提供的devkit以及相应数据集的calib文件 解读calib文件夹 解读devkit 目的 使用雷达点 ...
- KITTI数据集
目的 使用雷达点云提供的深度信息 如何实现 将雷达的三维点云投影到相机的二维图像上 kitti数据集简介 kitti的数据采集平台,配置有四个摄像机和一个激光雷达,四个摄像机中有两个灰度摄像机,两个彩 ...
- KITTI数据集上MaskRCNN检测效果示例
KITTI数据集上MaskRCNN检测效果示例 在Semantic Instance Segmentation Evaluation中,MaskRCNN性能效果排名第一. Test Image 0 I ...
- stixel-world跑在kitti数据集
kitti数据集中每一帧的Calibration不同,每一帧都存储了4个相机的Calibration http://ww.cvlibs.net/publications/Geiger2013IJRR. ...
- 推荐系统:MovivLens20M数据集解析
MovieLens 是历史最悠久的推荐系统.它由美国 Minnesota 大学计算机科学与工程学院的 GroupLens 项目组创办,是一个非商业性质的.以研究为目的的实验性站点.MovieLens ...
- 下载Kitti 数据集(dataset) data_road.zip
官网下载http://www.cvlibs.net/download.php?file=data_road.zip,耗时近3小时,虽然只有几百兆. 但是,我坚持下来了. 保存到了百度网盘,以供国内用户 ...
随机推荐
- DNS 域名解析过程
当用户在浏览器中输入域名并按下回车键后,DNS解析会有如下7个步骤 浏览器缓存 浏览器会检查缓存中有没有这个域名对应的解析过的IP地址,如果缓存中有,这个解析过程就将结束.浏览器缓存域名也是有限制的, ...
- MySQL 查询某个列中同样值的数量统计
数据如今是这种,我想确定出type列中的news和image....甚至以后有其它值,他们分别有多少个. SELECT type, count(1) AS counts FROM material G ...
- 你所不知道的库存超限做法 服务器一般达到多少qps比较好[转] JAVA格物致知基础篇:你所不知道的返回码 深入了解EntityFramework Core 2.1延迟加载(Lazy Loading) EntityFramework 6.x和EntityFramework Core关系映射中导航属性必须是public? 藏在正则表达式里的陷阱 两道面试题,带你解析Java类加载机制
你所不知道的库存超限做法 在互联网企业中,限购的做法,多种多样,有的别出心裁,有的因循守旧,但是种种做法皆想达到的目的,无外乎几种,商品卖的完,系统抗的住,库存不超限.虽然短短数语,却有着说不完,道不 ...
- 小贝_mysql主从复制作用以及案例
mysql主从复制 简要: 一.mysql用户授权 二.mysql bin-log日志 三.mysql主从复制 一.mysql用户授权 1.命令 2.作用:进行权限控制 3.样例: (备注: 同意 ...
- Spark SQL之External DataSource外部数据源(二)源代码分析
上周Spark1.2刚公布,周末在家没事,把这个特性给了解一下,顺便分析下源代码,看一看这个特性是怎样设计及实现的. /** Spark SQL源代码分析系列文章*/ (Ps: External Da ...
- 01 svn服务搭建
一:svn服务搭建.(1)首先下载服务端svn: Setup-Subversion-1.6.5.msi(2)下载客户端svn: TortoiseSVN-1.6.6.17493-win32-svn-1. ...
- WPF自定义Popup和弹出菜单
Popup: <StackPanel Grid.Column="0" Grid.Row="6" Orientation="Horizontal& ...
- MySQL 创建自定义函数(1)
1. 创建测试自定义函数(1) CREATE DEFINER=`dbdh`@`localhost` FUNCTION `test`.`sp_function_dbdh_three`() RETURNS ...
- # Playables API(翻译)
The Playables API provides a way to create tools, effects or other gameplay mechanisms by organi ...
- ssemble JavaBeans components into an application without having to write any code
https://docs.oracle.com/javase/tutorial/javabeans/ https://docs.oracle.com/javase/tutorial/javabeans ...